Blog:
Parameter Tuning Instructions for Robot Arm Singularity Threshold Core Concept: Minimum Singular Value
The minimum singular value of a robot arm is a core indicator for measuring the singularity degree under its current configuration. It can also intuitively reflect the manipulatability of the robot arm in various movement directions.
- The larger the value, the farther the robot arm is from the singular state, and the greater its manipulatability.
- The smaller the value, the closer the robot arm is to the singular state, and the smaller its manipulatability.
Calculation Logic of Minimum Singular Value
The calculation of the minimum singular value is achieved by performing singular value decomposition on the Jacobian matrix under the current configuration. After decomposition, a minimum singular value matrix is obtained. The 6 elements on the diagonal of this matrix correspond to the singular values of the robot arm in the six movement directions: x, y, z, r, p, y respectively. The magnitude of these singular values directly defines the manipulatability of the robot arm in each movement direction at the current moment.
When judging the singularity characteristics of the robot arm, the minimum value among the 6 singular values is usually used as the basis. According to the bucket effect, the minimum singular value determines the current overall singularity characteristics of the robot arm.
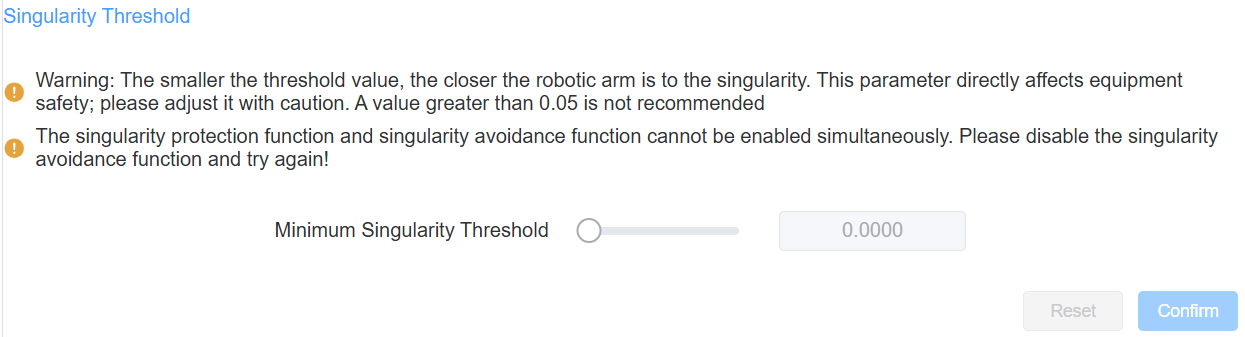
Threshold Parameter Tuning
To allow users to control the robot arm's sensitivity to the singular state according to actual needs, the teach pendant interface provides a Singularity Threshold parameter tuning function. Its tuning logic and effect are directly related to the triggering timing of the robot arm's alarm:
| Singularity Threshold Tuning Direction | Sensitivity to Singularity | Core Impact (Alarm Trigger Timing) |
|---|---|---|
| Increase the threshold | More sensitive perception | When the robot arm is still far from the singular state, the system will trigger a singularity alarm to avoid risks in advance. |
| Decrease the threshold | Less sensitive perception | The robot arm needs to be closer to the singular state before the system triggers an alarm, which can retain more operating space. |
Default Value and Tuning Recommendations
Default Parameter Setting
The default singularity threshold of the system is 0.01.
Scenario-Specific Parameter Tuning
The essence of singularity threshold parameter tuning is to seek a balance between safety early warning sensitivity and operating space utilization. Users need to formulate personalized parameter setting schemes based on the load, precision, movement range requirements of specific tasks, as well as on-site safety specifications. This avoids efficiency losses or equipment risks caused by improper parameters.
Scenarios requiring threshold reduction: In some special scenarios, even if the actual singular value of the robot arm is lower than 0.01, it may still have sufficient manipulatability to meet task requirements in specific movement directions. If the threshold is kept at 0.01 at this time, the system will trigger unnecessary alarms in advance. This wastes the part of the operating space that could have been utilized and affects task efficiency. In this case, users can appropriately reduce the threshold according to the load and precision requirements of the actual task to fully utilize the operating space.
Scenarios requiring threshold increase: If users find during use that the default threshold of 0.01 is too loose, resulting in the system being insufficiently sensitive to the singular state, they can appropriately increase the threshold to improve alarm sensitivity. However, special attention should be paid: the higher the threshold setting, the earlier the system triggers an alarm. Although this can improve safety, it may sacrifice part of the operating redundancy space of the robot arm in the area near the singular point.
Special Parameter Description
If the threshold is directly set to 0, it is equivalent to completely turning off the singularity alarm function.
Note
This setting is only recommended for temporary use in special experimental scenarios under the guidance of professionals. It is strictly prohibited to set it to 0 in regular tasks. After turning off the alarm, there will be no reminder when the robot arm approaches the singular point, which is very likely to cause robot arm failures.