Overview
RealSource (RS) Universal Robotic Motion Dataset (hereafter referred to as RS-ManiRW) is designed to collect multimodal data covering a broad range of universal tasks using a purpose-built RS data-acquisition robot. The dataset supports multiple mainstream formats, including MCAP, HDF5, and LeRobot.
We offer customized data-collection services tailored to your requirements, with the capacity to produce 60,000 high-quality data entries per day. Providing data support for reinforcement-learning algorithm validation, model development, and real-world deployment.
Video won't load? Click to view
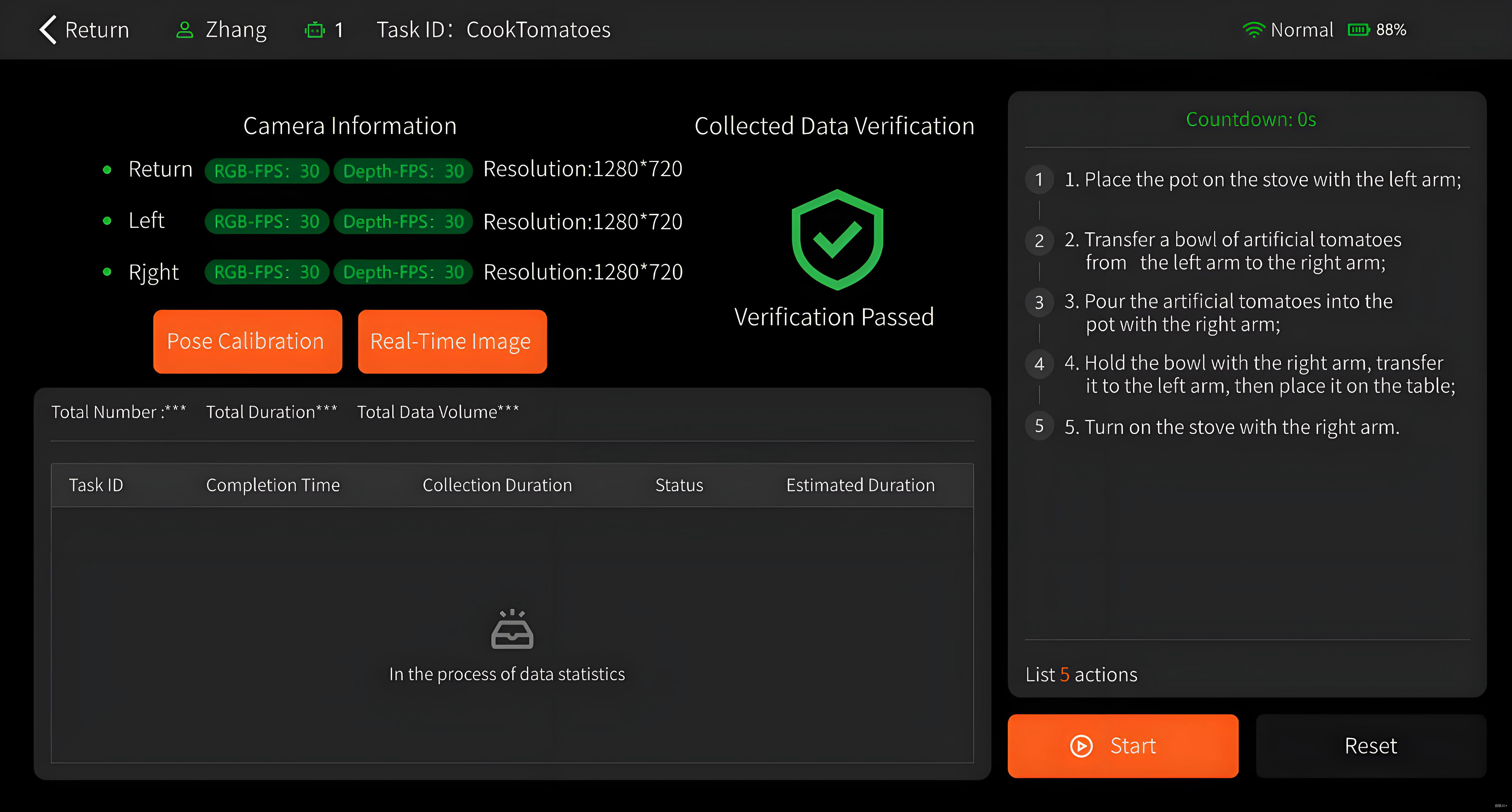
To efficiently manage data-collection tasks while guaranteeing data quality, we provide RS-TDC—edge-side acquisition software purpose-built for our robotic hardware platform. RS-TDC delivers four core capabilities:
- Task Orchestration: Centrally schedules and dispatches collection tasks to minimize resource costs.
- Quality Assurance: Embedded embodied-data validation module checks completeness, continuity, and validity to raise delivery standards.
- Standardized SOPs: Intuitive HMI guides operators through standardized collection workflows, boosting efficiency.
- Ecosystem Integration: Open APIs enable custom data-business logic, accelerating time-to-value.
Objectives and Positioning
The core objective of RS-ManiRW is to build a large-scale, high-quality, multimodal motion dataset focused on interaction data generated when robots perform universal tasks.
- Purpose: To provide rich training and evaluation resources for robotic learning algorithms, especially reinforcement learning and imitation learning.
- Objective: By collecting motion data of robots in various scenarios such as daily life, simplified medical procedures, basic industrial operations, and caregiving companionship, the dataset aims to capture the complexity and diversity of real-world tasks.
- Positioning: To become an open, standardized benchmark dataset that promotes research and development in universal robotic capabilities.
- Completeness: The dataset emphasizes the authenticity, diversity, and granularity of the data, striving to reflect the complete process of interaction between robots and the environment and objects.
Features and Advantages
The dataset has the following significant features and advantages:
- Task Universality and Scenario Diversity: The dataset covers a wide range of universal task categories, including but not limited to daily activities, simplified medical procedures, basic industrial operations, and caregiving companionship, ensuring the richness and broad applicability of the data content.
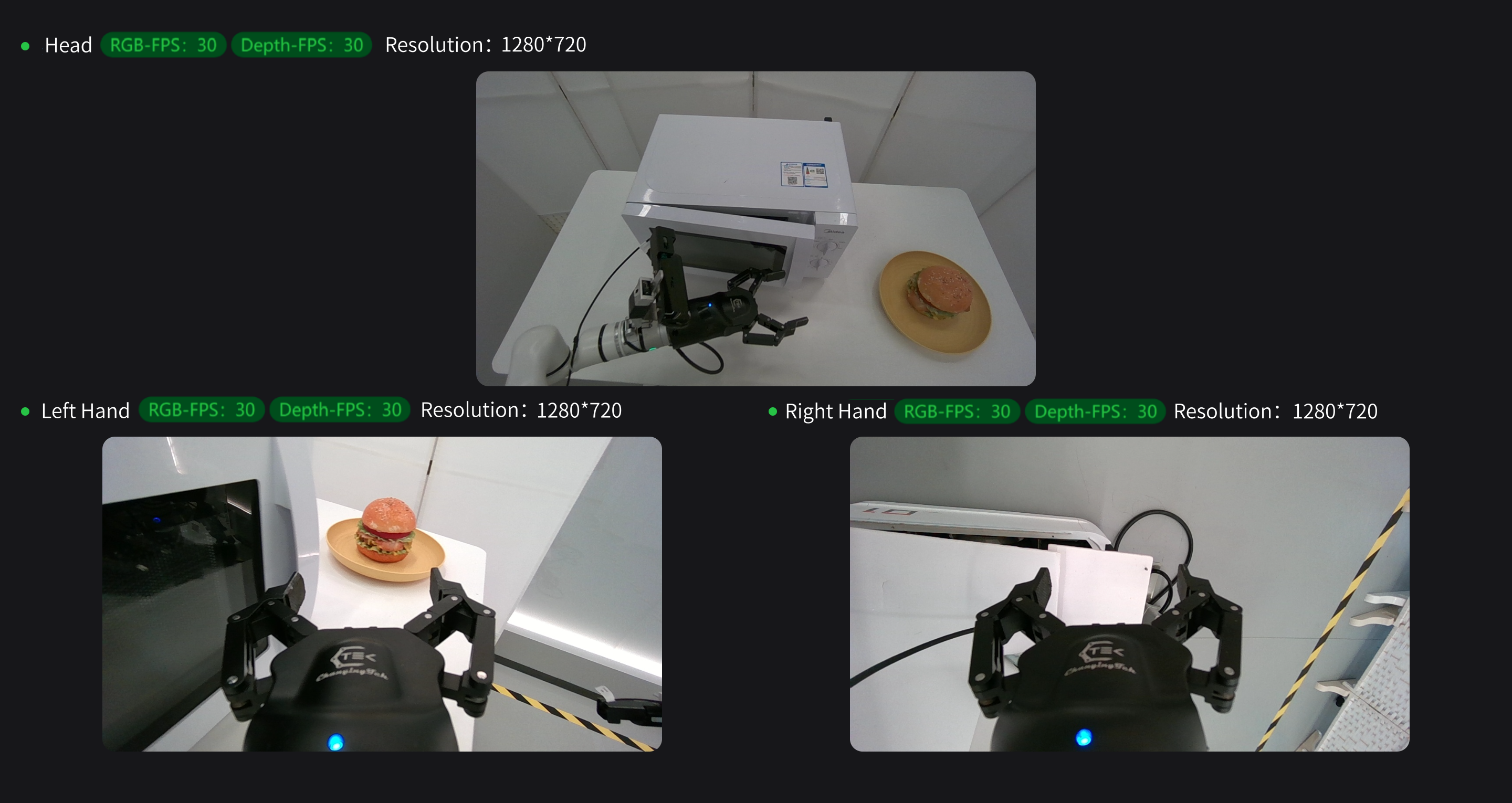
- High-Quality Multimodal Data: Using the specially designed RS data acquisition robot, high-fidelity multimodal data, including visual (RGB) and proprioceptive (joint positions, velocities, accelerations, force feedback, etc.), are synchronously collected to provide comprehensive interaction information for models.
- Fine-Grained Motion Capture and Annotation: The dataset not only includes raw sensor data but also provides fine-grained motion labels and task context information, helping models understand the semantics and intentions of actions.
- Standardization and Usability: Supporting industry-standard data formats such as MCAP, HDF5, and LeRobot, the dataset is easy for users to integrate into existing research workflows and toolchains.
- Optimized for Robotic Learning: The data acquisition process specifically considers the needs of advanced robotic learning algorithms such as reinforcement learning, emphasizing data synchronization, timestamp alignment, and diversity of tasks and scenarios.
- Commercially Verified in a Closed Loop: We have served several leading domestic and international companies, including embodied intelligence companies, AI large model companies, government research institutions, and academic groups. The data collection scenarios include household scenarios (cleaning, tidying up, object manipulation and transportation), industrial production (assembly line part sorting), and infrastructure maintenance (IT data centers), with a large amount of high-quality data collected.
Collaboration Opportunities and Data Customization
In addition to the publicly released dataset, we are also very open to deeper collaborations with research institutions and companies in academia and industry. Collaboration forms can include but are not limited to:
- Joint Research Projects: Targeting specific research directions or technical challenges, jointly apply for research projects and use the robotic data acquisition platform and dataset for collaborative research.
- Data Customization Services: If the public dataset does not meet specific research needs, we can provide customized data acquisition services according to the specific requirements of our partners. This includes customizing specific task scenarios, environmental settings, sensor configurations, and annotation standards. In this way, partners can obtain highly targeted data to support their proprietary projects or product development.
- Technical Consultation and Solutions: Leveraging our technical expertise in robotic joints, humanoid robotic arms, and humanoid robots, as well as our professional knowledge in embodied intelligence and data acquisition, we can provide technical consulting services for our partners or jointly develop robotic solutions for specific application scenarios.
Contact Information and Support
- To learn more about RealMan products, please visit RealMan official website
- To learn more about the use of RealMan products, please visit RealMan Academy
- For any questions about Realman's data acquisition robots and other products, please send an email to the official email account sales@realman-robot.com
- To learn about the latest news about Realman's data acquisition robots and other products, please follow the WeChat official account
 |  |
|---|---|
| After-sales Service Assistant [睿小宝] | Follow the Official WeChat Public Account |