Detailed Parameters of Joints in Each Series:
WHJ60 Series Specifications Model: WHJ60_S_D70_100_B
Illustration
Performance parameters
| Parameter | Value |
|---|---|
| Reduction ratio | 100 |
| Weight | 1040 g |
| Diameter of reducer mm | 70 |
| Size (D × L mm) | 70 × 91 |
| Rated torque N.m | 60 |
| Maximum torque density | 180 |
| Repeatability | ±15 arc-seconds |
| Peak speed (RPM) | 30 (24 V) / 60 (48 V) |
| Moment of inertia (kg*m^2) | 5.51*10^-5 |
| Hollow aperture | 9 mm |
| Working temperature | 0 to 50°C |
| Rated power | 264 W |
| Rated voltage | 24 V / 48 V |
| Rated current | 11 A (24 V) / 5.3 A (48 V) |
| Type of brake | Latch brake |
| Incremental encoder | 16 bits |
| Absolute position encoder | 18 bits |
| Communication interface | CANFD |
| Examples of scenarios | Robotic arm, and shoulder joint, waist joint, vertical hip joint and ankle joint of humanoid robot, heavy turntable, etc. |
When operating under high loads and high speeds, the joint module generates regenerative braking energy. An external "Power Discharge Module" (see Power Bleeding Module) is required to prevent errors and shutdowns due to excessive bus voltage caused by regenerative energy feedback leading to a surge in the power supply voltage.
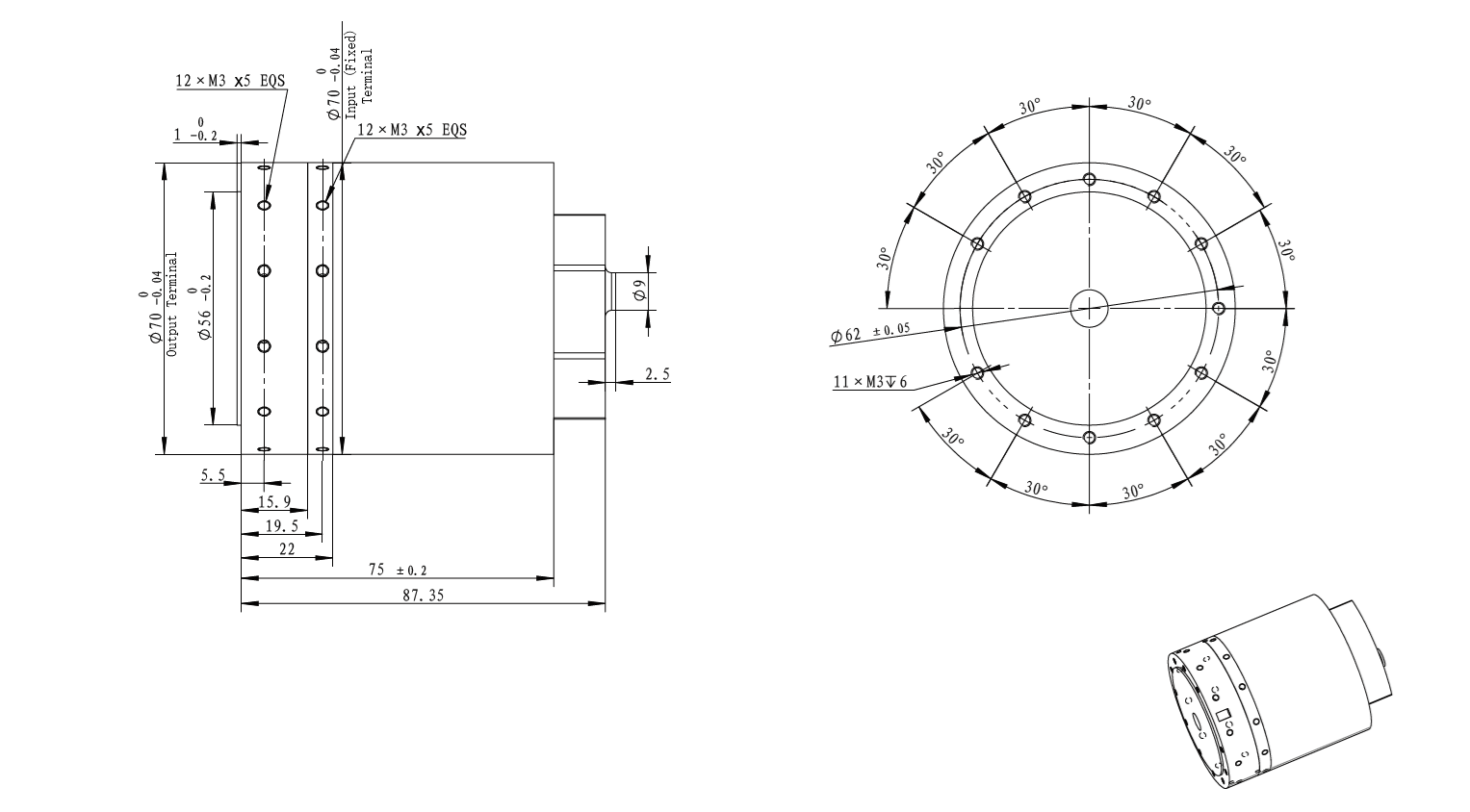
Detailed dimensions