应用集成案例:
URDF转XACRO 一、 项目概述
1.1 项目背景与目标
1.1.1 项目背景
发展需求:
随着机器人技术的快速发展,尤其是工业机器人和移动机器人的应用越来越广泛,需要高效、灵活且可扩展的方法来设计和开发机器人模型。
在机器人开发过程中,URDF(Unified Robot Description Format)是ROS(Robot Operating System)中用于描述机器人模型的标准格式,但其可复用性和可维护性有限。
Xacro的优势:
- Xacro(XML Macros)是ROS中用于生成URDF的一种工具,通过宏定义和属性封装,可以显著简化URDF文件的复杂性,提高代码的可复用性和可维护性。
- 通过Xacro,可以将复杂的机器人模型拆分为多个模块化的文件,便于管理和维护,同时支持参数化配置,方便不同型号机器人的快速开发。
应用场景:
- 本案例中提到的睿尔曼复合升降机器人是一种集成了底盘、机械臂、升降平台和夹爪的多功能机器人,适用于物流、仓储、自动化生产等场景。
- 这种机器人需要在ROS框架下进行仿真和控制,因此需要一个高效且灵活的URDF模型来支持其开发和测试。
1.1.2 项目目标
- 模块化:通过模块化设计,实现不同部件的独立开发和测试,同时支持快速组装和配置。
- 参数化:利用Xacro的宏定义功能,将重复的代码段封装为可复用的模板,减少冗余代码,提高开发效率。
- 易推广:通过文档和示例代码,降低开发门槛,促进机器人技术的推广和应用。
1.1.3 总结
该项目旨在通过Xacro技术实现睿尔曼复合升降机器人的URDF模型的高效开发和管理,同时支持ROS框架下的仿真和控制。其核心目标是提高机器人开发的效率、灵活性和可维护性,为工业和物流场景中的机器人应用提供技术支持。
1.2 核心功能
1.2.1 模块化设计
将机器人拆分为底盘、机械臂、升降平台和夹爪等独立模块,每个模块都有独立的Xacro文件,便于管理和维护。
支持独立开发和测试,便于后续的组装和配置。
1.2.2 参数化配置
利用Xacro的宏定义功能,实现机器人模型的参数化设计。
支持不同型号机器人(如RM65-B和RM75-B)的快速开发和调整,减少重复代码。
1.2.3 仿真与控制支持
配置Gazebo仿真环境,确保机器人模型能够在仿真环境中正常运行。
支持控制插件集成,提供完整的仿真和控制流程,包括RVIZ可视化和Gazebo仿真测试,验证机器人模型的正确性和功能完整性。
1.2.4 高效开发与维护
提高代码的可复用性和可维护性,降低开发门槛。
提供详细的教程和文档,帮助开发者快速掌握Xacro的使用方法和机器人模型的开发流程。
1.3 更新日志
| 更新日期 | 更新内容 | 版本号 |
|---|---|---|
| 2025/02/17 | 复合升降机器人URDF模型拼接项目初始版本发布 | v1.0.0 |
二、 软件环境
- 系统版本
- Ubuntu版本: 20.04
- 系统架构: X86/ARM64
- 软件版本
- ROS: neotic
三、 准备阶段
3.1 功能包获取
请参考附录-相关资源获取获取对应功能包,参照如下描述进行集成拓展。本文以RM75-B为例进行集成拓展,其他类型机械臂亦可参考此案例进行拼接拓展。
目前仅提供了RM65-B和RM75-B两种类型机械臂的对应功能包,其他类型机械臂请联系技术支持进行获取。
3.2 功能包结构
本文档主要基于 ROS1 框架,以睿尔曼复合升降机器人为示例进行讲解,最终形成的项目空间目录结构如下:
rm_Lifting_robot_75B_jaw_description # 75B机器人描述功能包
├── CMakeLists.txt
├── config
│ └── joint_names_75_body_single_arm_Lifting_description.yaml
├── export.log
├── launch
│ ├── display.launch # 启动rviz展示机器人模型
│ └── gazebo.launch # 启动gazebo仿真
├── meshes # 模型文件
│ ├── 4C2_baselink.STL
│ ├── 4C2_Link1.STL
│ ├── 4C2_Link2.STL
│ ├── 4C2_Link3.STL
│ ├── 4C2_Link4.STL
│ ├── 4C2_Link5.STL
│ ├── 4C2_Link6.STL
│ ├── arm_base_link1.STL
│ ├── arm_base_link.STL
│ ├── base_link.STL
│ ├── body_base_link1.STL
│ ├── body_base_link.STL
│ ├── l_wheel_link.STL
│ ├── medium_wheel_link2.STL
│ ├── min_wheel_link1.STL
│ ├── platform_link.STL
│ ├── r_link1.STL
│ ├── r_link2.STL
│ ├── r_link3.STL
│ ├── r_link4.STL
│ ├── r_link5.STL
│ ├── r_link6.STL
│ ├── r_link7.STL
│ ├── r_wheel_link.STL
│ ├── swivel_wheel_link1_1.STL
│ ├── swivel_wheel_link1_2.STL
│ ├── swivel_wheel_link2_1.STL
│ ├── swivel_wheel_link2_2.STL
│ ├── swivel_wheel_link3_1.STL
│ ├── swivel_wheel_link3_2.STL
│ ├── swivel_wheel_link4_1.STL
│ └── swivel_wheel_link4_2.STL
├── package.xml
└── urdf
├── agv.urdf.xacro # 底盘URDF
├── common_gazebo.xacro # Gazebo仿真控制插件
├── jaw_transmission.xacro # 夹爪传动配置
├── jaw.urdf.xacro # 夹爪URDF
├── joint.urdf.xacro # 不同模块之间的关节URDF描述
├── platform.urdf.xacro # 升降平台URDF描述
├── rm75_transmission.xacro # rm75机械臂传动配置
├── rm75.urdf.xacro # rm75机械臂URDF描述
├── rm_Lifting_robot_75B_jaw_description.csv
├── rm_Lifting_robot_75B_jaw_description.urdf
└── rm_Lifting_robot_75B_jaw_description.urdf.xacro # 将各模块的Xacro文件整合成完整的URDF文件以RM75-B机器人描述功能包为例:
- 在 urdf 文件夹中,我们将机器人模型拆分为底盘、机械臂、升降平台和夹爪四个独立的 Xacro (
agv.urdf.xacro、jaw.urdf.xacro、platform.urdf.xacro、rm75.urdf.xacro)文件,以便于管理和配置。 - 在主 Xacro 文件(
rm_Lifting_robot_75B_jaw_description.urdf.xacro)中将底盘、机械臂、升降平台和夹爪四个模块整合为完整的模型。 - 在
common_gazebo.xacro文件中配置仿真插件,用于 Gazebo 仿真,如控制机器人移动的插件libgazebo_ros_control.so,确保机器人在 Gazebo 中能够接收控制命令并完成相应的动作。 - 在每个模块均引入
transmission配置,定义机器人关节与控制器之间的传动关系。确保Gazebo中的控制器插件能够正确计算关节的输入/输出,提供更精确的运动控制,模拟实际机器人驱动结构。
四、 代码接口说明
4.1 Xacro文件语法解释
以agv.urdf.xacro为例,一个完整的Xacro文件的语法构成如下:
<?xml version="1.0" encoding="utf-8"?>
<robot name="agv" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- Define constants -->
<xacro:property name="mesh_path" value="package://rm_Lifting_robot_75B_jaw_description/meshes/" /> <!-- 定义属性 -->
<!-- Macro to define a generic link with mass, inertia, and visual -->
<xacro:macro name="visual_collision" params="mesh"> <!-- 定义宏 -->
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<mesh filename="${mesh_path}${mesh}" />
</geometry>
<material name="">
<color rgba="1 1 1 1" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<mesh filename="${mesh_path}${mesh}" />
</geometry>
</collision>
</xacro:macro>
<link name="base_link">
<inertial>
<origin xyz="-0.00022588 -0.029317 0.067118" rpy="0 0 0" />
<mass value="3.652" />
<inertia ixx="0.040658" ixy="-4.1019E-05" ixz="0.00010805"
iyy="0.085621" iyz="-0.00031013" izz="0.10712" />
</inertial>
<xacro:visual_collision mesh="base_link.STL" /> <!-- 调用宏 -->
</link>
...
<joint name="r_wheel_joint_1" type="continuous">
<origin xyz="-0.151 0 -0.0109" rpy="0 0 0" />
<parent link="base_link" />
<child link="r_wheel_link" />
<axis xyz="1 0 0" />
<limit effort="100" velocity="10" />
</joint>
...
</robot>4.1.1 头文件
<?xml version="1.0" encoding="utf-8"?>
<robot name="agv" xmlns:xacro="http://www.ros.org/wiki/xacro">函数定义:
<?xml version="1.0" encoding="utf-8"?>:声明XML文件的版本和编码方式。<robot>:ROS 定义的机器人描述文件的根元素,name属性表示机器人的名称,可根据具体情况自定义。在使用xacro生成urdf时,根标签
robot中必须包含xmlns:xacro="http://www.ros.org/wiki/xacro。
4.1.2 属性定义
<!-- Define constants -->
<xacro:property name="mesh_path" value="package://rm_Lifting_robot_75B_jaw_description/meshes/" />函数定义:
使用
<xacro:property>标签定义属性,name指定属性的名称,value指定所定义的属性的值。用于封装URDF中的一些参数,比如PI值、尺寸、颜色、模型路径等,方便调试和修改参数。
属性调用:{属性名称},比如{mesh_path}。
4.1.3 宏定义
在 URDF 文件中,通过封装重复率较高的代码段到宏(macro)中,可以显著提高代码复用率,并优化代码的整体结构。
<!-- Macro to define a generic link with mass, inertia, and visual -->
# 定义宏名称和参数(多参数之间使用空格分隔)
<xacro:macro name="visual_collision" params="mesh">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<mesh filename="${mesh_path}${mesh}" />
</geometry>
<material name="">
<color rgba="1 1 1 1" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<mesh filename="${mesh_path}${mesh}" />
</geometry>
</collision>
</xacro:macro>函数定义:
使用
<xacro:macro>标签定义宏,属性name指定宏名称,params定义宏的参数,当存在多个参数时,参数之间用空格分隔,即<xacro:macro name="visual_collision" params="mesh color">。参数调用格式:{参数名},以上述代码为例,参数调用为{mesh}。
宏调用:
<xacro:宏名称 参数1="xxx" 参数2="xxx" />,例如,要调用visual_collision宏并传入mesh参数,可以这样写<xacro:visual_collision mesh="base_link.STL" />。
4.1.4 文件包含
机器人由多模块组成,不同部件可能封装为单独的xacro文件,最后再将不同的文件集成,组合为完整的机器人,可以使用文件包含实现,具体实现代码如下:
<?xml version="1.0"?>
<robot name="rm_Lifting_robot_75B_jaw_description" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- 引入其他xacro文件:地盘、夹爪、升降平台、机械臂及关节 -->
<xacro:include filename="$(find rm_Lifting_robot_75B_jaw_description)/urdf/agv.urdf.xacro"/>
<xacro:include filename="$(find rm_Lifting_robot_75B_jaw_description)/urdf/jaw.urdf.xacro"/>
<xacro:include filename="$(find rm_Lifting_robot_75B_jaw_description)/urdf/platform.urdf.xacro"/>
<xacro:include filename="$(find rm_Lifting_robot_75B_jaw_description)/urdf/rm75.urdf.xacro"/>
<xacro:include filename="$(find rm_Lifting_robot_75B_jaw_description)/urdf/joint.urdf.xacro"/>
<!-- 在gazebo仿真环境中添加控制传动配置及Gazebo专用插件 -->
<xacro:include filename="$(find rm_Lifting_robot_75B_jaw_description)/urdf/common_gazebo.xacro"/>
<xacro:include filename="$(find rm_Lifting_robot_75B_jaw_description)/urdf/rm75_transmission.xacro"/>
<xacro:include filename="$(find rm_Lifting_robot_75B_jaw_description)/urdf/jaw_transmission.xacro"/>
</robot>4.2 传动配置的Xacro文件
4.2.1 夹爪的传动配置文件
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="rm75_jaw_transmission" params="joint_name">
<transmission name="${joint_name}_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${joint_name}">
<hardwareInterface>PositionJointInterface</hardwareInterface>
</joint>
<actuator name="${joint_name}_motor">
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<xacro:rm75_jaw_transmission joint_name="jaw_Joint1" />
<xacro:rm75_jaw_transmission joint_name="jaw_Joint2" />
<xacro:rm75_jaw_transmission joint_name="jaw_Joint3" />
<xacro:rm75_jaw_transmission joint_name="jaw_Joint4" />
<xacro:rm75_jaw_transmission joint_name="jaw_Joint5" />
<xacro:rm75_jaw_transmission joint_name="jaw_Joint6" />
</robot>4.2.2 机械臂的传动配置文件
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="rm75_transmission" params="joint_name">
<transmission name="${joint_name}_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${joint_name}">
<hardwareInterface>PositionJointInterface</hardwareInterface>
</joint>
<actuator name="${joint_name}_motor">
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<xacro:rm75_transmission joint_name="joint1" />
<xacro:rm75_transmission joint_name="joint2" />
<xacro:rm75_transmission joint_name="joint3" />
<xacro:rm75_transmission joint_name="joint4" />
<xacro:rm75_transmission joint_name="joint5" />
<xacro:rm75_transmission joint_name="joint6" />
<xacro:rm75_transmission joint_name="joint7" />
<xacro:rm75_transmission joint_name="platform_joint" />
</robot>4.3 Gazebo仿真控制插件xacro文件
<?xml version="1.0" ?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<gazebo>
<plugin name="control" filename="libgazebo_ros_control.so">
<robotNamespace>/</robotNamespace>
<robotSimType>gazebo_ros_control/DefaultRobotHWSim</robotSimType>
<legacyModeNS>true</legacyModeNS>
</plugin>
</gazebo>
</robot>4.4 将URDF文件拆解成Xacro文件
以创建rm75.urdf.xacro文件为例,以下是将URDF文件转换为Xacro文件的详细步骤。
4.4.1 复制URDF内容
将rm_Lifting_robot_75B_jaw_description.urdf机械臂相关的部分复制到一个新的文件中,命名为rm75.urdf.xacro。
<!-- RM75-B机械臂 -->
<link
name="r_link1">
<inertial>
<origin
xyz="2.8966E-07 0.025188 -0.021107"
rpy="0 0 0" />
<mass
value="0.59353" />
<inertia
ixx="0.0012661"
ixy="-2.0397E-09"
ixz="-5.3423E-09"
iyy="0.00056131"
iyz="-0.00021118"
izz="0.0011816" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://rm_Lifting_robot_75B_jaw_description/meshes/r_link1.STL" />
</geometry>
<material
name="">
<color
rgba="0.79216 0.81961 0.93333 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://rm_Lifting_robot_75B_jaw_description/meshes/r_link1.STL" />
</geometry>
</collision>
</link>
<joint
name="joint1"
type="revolute">
<origin
xyz="0 0 0.2405"
rpy="-1.5708 0 3.1416" />
<parent
link="arm_base_link1" />
<child
link="r_link1" />
<axis
xyz="0 -1 0" />
<limit
lower="-3.11"
upper="3.11"
effort="60"
velocity="3.14" />
</joint>
<link
name="r_link2">
<inertial>
<origin
xyz="3.7069E-07 0.011077 0.07613"
rpy="0 0 0" />
<mass
value="0.43285" />
<inertia
ixx="0.0012584"
ixy="7.782E-10"
ixz="3.39E-09"
iyy="0.0012224"
iyz="0.00027899"
izz="0.00031747" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://rm_Lifting_robot_75B_jaw_description/meshes/r_link2.STL" />
</geometry>
<material
name="">
<color
rgba="0.79216 0.81961 0.93333 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://rm_Lifting_robot_75B_jaw_description/meshes/r_link2.STL" />
</geometry>
</collision>
</link>
<joint
name="joint2"
type="revolute">
<origin
xyz="0 0 0"
rpy="1.5708 0 0" />
<parent
link="r_link1" />
<child
link="r_link2" />
<axis
xyz="0 1 0" />
<limit
lower="-2.27"
upper="2.27"
effort="60"
velocity="3.14" />
</joint>
...
<link
name="r_link7">
<inertial>
<origin
xyz="-0.028764 5.1464E-06 0.023085"
rpy="0 0 0" />
<mass
value="0.22147" />
<inertia
ixx="0.0001376"
ixy="-5.7488E-08"
ixz="1.6634E-05"
iyy="0.00026855"
iyz="-1.7799E-08"
izz="0.00035277" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://rm_Lifting_robot_75B_jaw_description/meshes/r_link7.STL" />
</geometry>
<material
name="">
<color
rgba="0.79216 0.81961 0.93333 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://rm_Lifting_robot_75B_jaw_description/meshes/r_link7.STL" />
</geometry>
</collision>
</link>
<joint
name="joint7"
type="revolute">
<origin
xyz="0 -0.00028182 0.117"
rpy="-0.00015298 0 0" />
<parent
link="r_link6" />
<child
link="r_link7" />
<axis
xyz="0 0 1" />
<limit
lower="-6.28"
upper="6.28"
effort="10"
velocity="3.925" />
</joint>4.4.2 拆解过程分析
在新创建的
rm75.urdf.xacro文件的顶部,添加Xacro特有的头文件。xml<?xml version="1.0"?> <robot name="rm75" xmlns:xacro="http://www.ros.org/wiki/xacro"> <!--定义机器人名称为rm75-->定义属性(通常考虑尺寸、颜色、模型路径、PI值等)。
xml<!-- Define constants --> <xacro:property name="mesh_path" value="package://rm_Lifting_robot_75B_jaw_description/meshes/" />仔细观察URDF模型代码,找出其中重复率高的代码段。
xml<visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://rm_Lifting_robot_75B_jaw_description/meshes/r_link4.STL" /> </geometry> <material name=""> <color rgba="0.79216 0.81961 0.93333 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://rm_Lifting_robot_75B_jaw_description/meshes/r_link4.STL" /> </geometry> </collision>将识别出的重复代码段转换为Xacro宏。Xacro宏允许你定义可重用的模板,这些模板可以在文件中多次调用,以减少重复代码并提高可维护性。
xml<!-- Macro to define a generic link with mass, inertia, and visual --> <xacro:macro name="visual_collision" params="mesh"> # 定义宏名称和参数 <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="${mesh_path}${mesh}" /> </geometry> <material name=""> <color rgba="0.79216 0.81961 0.93333 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="${mesh_path}${mesh}" /> </geometry> </collision> </xacro:macro>在
rm75.urdf.xacro文件中,用定义好的Xacro宏替换原有的重复代码段。确保替换后的结构保持不变,只改变重复部分的实现方式。xml<link name="arm_base_link1"> <inertial> <origin xyz="0.00033281 2.206E-05 0.060153" rpy="0 0 0" /> <mass value="0.83984" /> <inertia ixx="0.0017115" ixy="4.0276E-06" ixz="4.7032E-05" iyy="0.0016829" iyz="-1.8665E-06" izz="0.00089154" /> </inertial> <xacro:visual_collision mesh="arm_base_link1.STL" /> #宏调用 </link> <link name="r_link1"> <inertial> <origin xyz="2.8966E-07 0.025188 -0.021107" rpy="0 0 0" /> <mass value="0.59353" /> <inertia ixx="0.0012661" ixy="-2.0397E-09" ixz="-5.3423E-09" iyy="0.00056131" iyz="-0.00021118" izz="0.0011816" /> </inertial> <xacro:visual_collision mesh="r_link1.STL" /> #宏调用 </link> ... <joint name="joint1" type="revolute"> #joint部分保持不变 <origin xyz="0 0 0.2405" rpy="-1.5708 0 3.1416" /> <parent link="arm_base_link1" /> <child link="r_link1" /> <axis xyz="0 -1 0" /> <limit lower="-3.11" upper="3.11" effort="60" velocity="3.14" /> </joint> <joint name="joint2" type="revolute"> <origin xyz="0 0 0" rpy="1.5708 0 0" /> <parent link="r_link1" /> <child link="r_link2" /> <axis xyz="0 1 0" /> <limit lower="-2.27" upper="2.27" effort="60" velocity="3.14" /> </joint> ...
五、 案例验证
方法一:
使用xacro命令行工具来验证新创建的Xacro文件是否正确无误。例如,可以通过以下命令将Xacro文件转换回URDF格式进行验证。
cd <你的工作空间名称>/src/rm_description/rm_Lifting_robot_75B_jaw_description/urdf # 进入到urdf文件夹
xacro --inorder rm75.urdf.xacro # xacro --inorder <xacro文件名>检查生成的URDF文件是否与原始URDF文件在功能和结构上保持一致。
方法二:
# 构建工作空间
mkdir -p <你的工作空间名称>/src
# 进入工作空间目录
cd <你的工作空间名称>
# 编译
catkin build
# 添加工作空间环境变量
source ./devel/setup.bash
# 启动配置好的功能包
roslaunch rm_Lifting_robot_75B_jaw_description display.launch进入RVIZ页面后,首先将Fixed Frame设置为base_link,点击Add,找到RobotModel,最后点击OK。
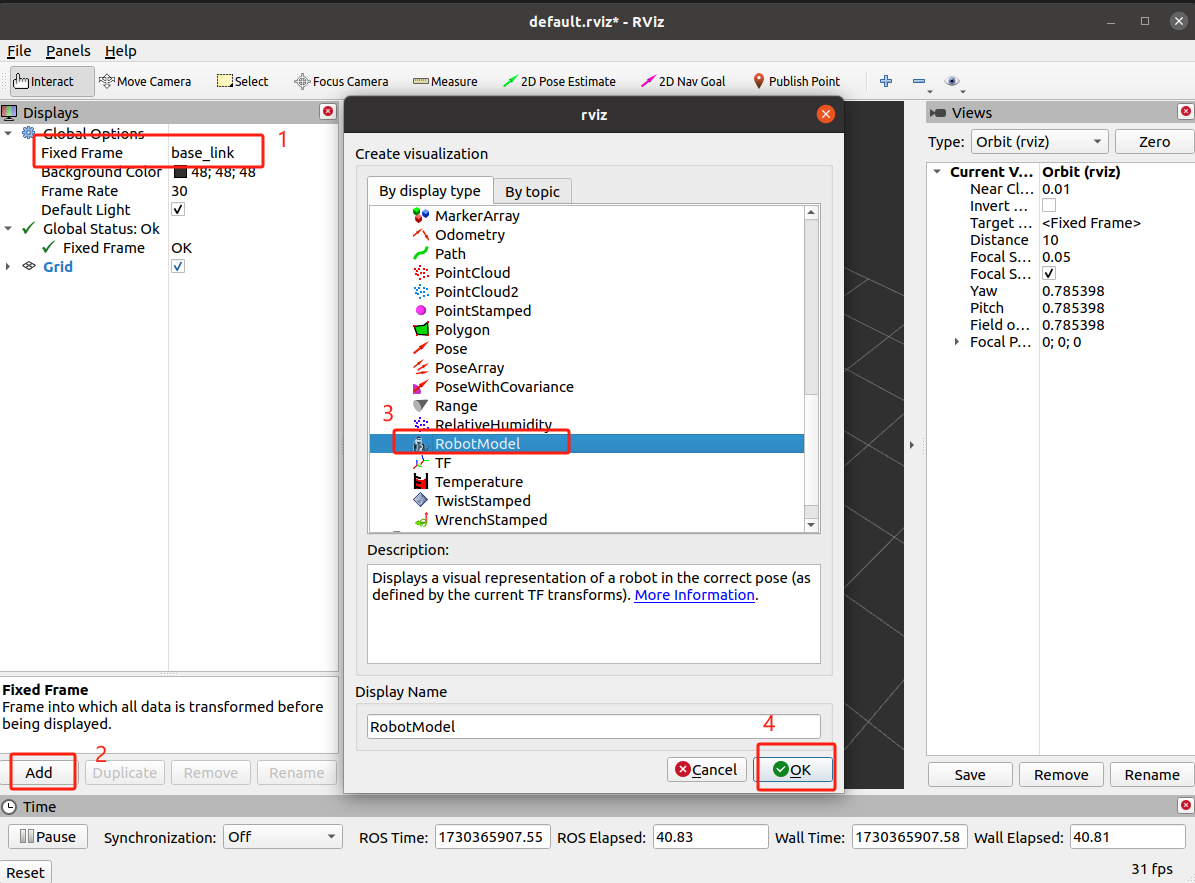
模型显示结果如下图所示。
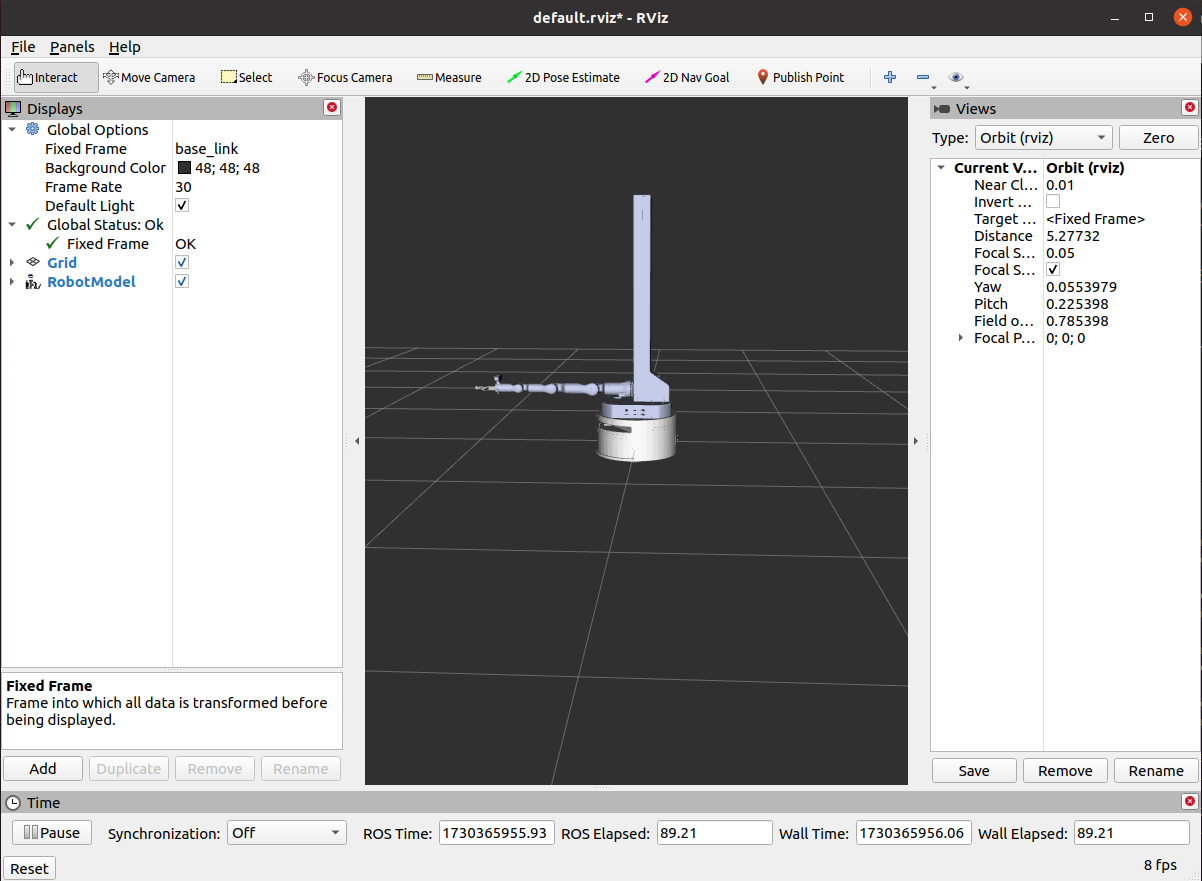
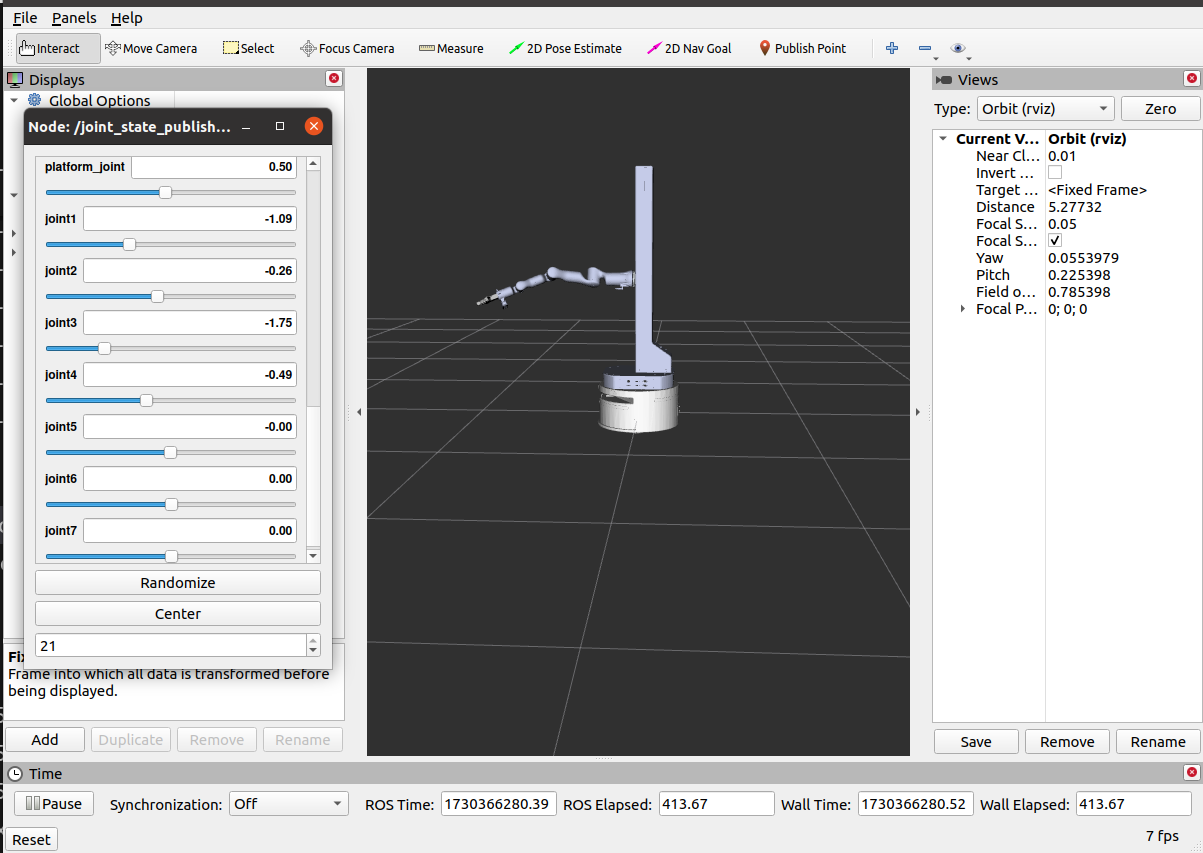
可以使用 joint_state_publisher_gui 在 RViz 中测试机械臂的各关节状态,一切功能正常。
# 构建工作空间
mkdir -p <你的工作空间名称>/src
# 进入工作空间目录
cd <你的工作空间名称>
# 编译
catkin build
# 添加工作空间环境变量
source ./devel/setup.bash
# 测试模型是否可以在gazebo中显示
roslaunch rm_Lifting_robot_75B_jaw_description gazebo.launchgazebo.launch文件的作用是读取参数服务器里面robot_description内容通过urdf_spawner节点生成机器人模型,内容如下。
<launch>
<arg name="paused" default="false" />
<arg name="use_sim_time" default="true" />
<arg name="gui" default="true" />
<arg name="headless" default="false" />
<arg name="debug" default="false" />
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)" />
<arg name="use_sim_time" value="$(arg use_sim_time)" />
</include>
<param name="robot_description" command="$(find xacro)/xacro '$(find rm_Lifting_robot_75B_jaw_description)/urdf/rm_Lifting_robot_75B_jaw_description.urdf.xacro'" />
<!--<param name="robot_description" textfile="$(find rm_Lifting_robot_75B_jaw_description)/urdf/rm_Lifting_robot_75B_jaw_description.urdf" />-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen" args="-urdf -model rm_Lifting_robot_75B_jaw_description -param robot_description -x 0 -y 0 -z 0.1" />
</launch>
至此,机器人模型成功加载至gazebo中。