概述
RealSource(RS)通用机器人动作数据集(以下简称为 RS-ManiRW)旨在通过专门设计的 RS 数据采集机器人,采集覆盖广泛通用任务的多模态数据。该数据集支持 MCAP、HDF5、LeRobot等多种主流数据格式。
我们提供基于客户需求的定制化数据采集服务,具备日产60000条高质量数据的能力。为强化学习算法验证、模型开发及场景落地提供数据支持。
为了对数据采集任务进行高效的管理,同时确保采集数据的质量,我们提供深度适配数据采集机器人硬件平台的端侧数据采集软件(RS-TDC)。端侧数据采集软件具备以下几大核心功能:
- 采集任务管理:对数据采集任务进行统一的编排和分发,最大限度节省资源成本。
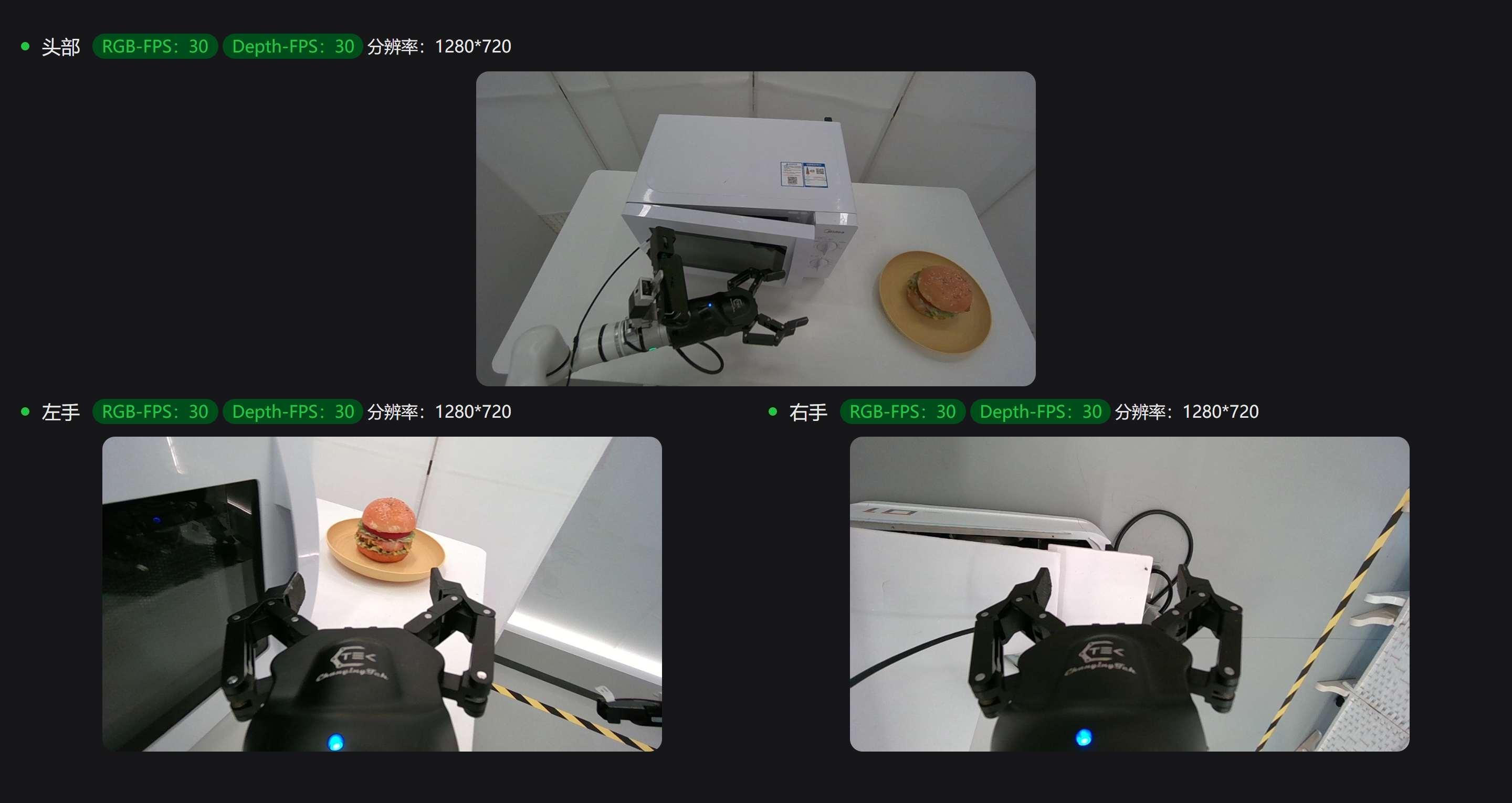
- 数据质量监控:内嵌具身数据质量校验模块,对数据完整性,连续性及有效性进行校验,提升数据交付质量。
- 采集SOP规范化:提供友好的人机交互界面,标准化数据采集动作,提升数据采集效率。
- 生态集成:开放API接口满足客户定制化数据业务的需求,快速实现数据业务价值。

目标与定位
RS-ManiRW的核心目标是构建一个大规模、高质量、多模态的动作数据集,专注于机器人执行通用任务时的交互数据。
- 宗旨:为机器人学习算法,特别是强化学习和模仿学习,提供丰富的训练和评估资源。
- 目标:通过采集机器人在日常生活、简化医疗程序、基础工业操作以及看护陪伴等多种场景下的动作数据,致力于捕捉真实世界任务的复杂性和多样性。
- 定位:成为一个开放、标准化的基准数据集,推动通用机器人能力的研究与发展。
- 完整:数据集强调数据的真实性、多样性和精细度,力求反映机器人与环境和物体交互的完整过程。
特点与优势
具备以下显著特点和优势:
- 任务通用性与场景多样性:数据集覆盖广泛的通用任务类别,包括但不限于日常活动、简化医疗程序、基础工业操作和看护陪伴,确保数据内容的丰富性和应用广度。
- 高质量多模态数据:通过专门的RS数据采集机器人,同步采集高保真度的视觉(RGB)、本体感知(关节位置、速度、加速度,力反馈等)等多模态数据,为模型提供全面的交互信息。
- 精细动作捕捉与标注:数据集不仅包含原始传感器数据,还提供精细的动作标签和任务上下文信息,有助于模型理解动作的语义和意图。
- 标准化与易用性:支持MCAP,HDF5和LeRobot等业界标准数据格式,方便用户集成到现有的研究流程和工具链中。
- 面向机器人学习优化:数据采集过程特别考虑了强化学习等先进机器人学习算法的需求,例如强调数据同步、时间戳对齐以及任务与场景的多样性。
- 经过商业化闭环验证:我们已经服务了多家国内外头部企业,这些企业的类型包括具身智能公司,AI大模型公司,政府科研机构及学术团体。采集数据的场景包括家庭场景(清洁,收纳整理,物品拿放和搬运),工业生产(产线零部件分拣),基础设施运维(IT机房),已采集了海量的高质量数据。
合作机会与数据定制
除了公开发布的数据集,我们也非常欢迎与学术界和工业界的研究机构、企业开展更深层次的合作。合作形式可以包括但不限于:
- 联合研究项目:针对特定研究方向或技术难题,共同申请科研项目,利用机器人数据采集平台和数据集进行联合攻关。
- 数据定制服务:如果公开数据集不能满足特定研究需求,我们可以根据合作伙伴的具体要求,提供数据定制采集服务。这包括定制特定的任务场景、环境设置、传感器配置、以及标注规范。通过这种方式,合作伙伴可以获得高度针对性的数据,以支持其专有项目或产品研发。
- 技术咨询与解决方案:凭借我们在机器人关节,仿人机械臂,人形机器人方面的技术积累、以及具身智能和数据采集方面的专业知识,我们可以为合作伙伴提供技术咨询服务,或共同开发针对特定应用场景的机器人解决方案。
联系方式和支持
- 了解更多睿尔曼产品,请访问:睿尔曼官网
- 了解更多睿尔曼产品的使用,请访问:睿尔曼学院
- 咨询睿尔曼数据采集机器人及其他产品问题,请发送邮件至官方邮箱: sales@realman-robot.com
- 睿尔曼数据采集机器人及其他产品的最新资讯请关注:官方微信公众号
 |  |
|---|---|
| 售后服务助手【睿小宝】 | 关注官方微信公众号 |