Solution:
Robotic Convenience Store Overview
The robotic smart convenience store is an embodied intelligent convenience store that employs robots as shop assistants. Covering an area of 10 square meters, it supports 24/7 autonomous operation and sells high-frequency consumer goods such as beverages and snacks. The store consists of a space capsule, a robot, and an ordering system. It operates just like a traditional manned convenience store but without labor costs. The supporting robot is an intelligent service robot built for new retail and smart store scenarios. It integrates autonomous navigation, intelligent recognition and grasping, can move flexibly inside the store, picks up and delivers goods according to customer orders, and provides users with real application experience in the era of embodied intelligence.
Product Introduction
Driven by the wave of new retail and intelligence, the smart convenience store robot adopts an innovative model of Robot + Space Capsule + Mini Program. A fully functional smart store can be quickly built with only 10 square meters of space. It breaks the operational boundaries of traditional convenience stores, requires no on-site staff, and provides 24-hour fully automated service. It is suitable for various outdoor and semi-outdoor scenarios such as Internet-famous streets, parks, office buildings, communities and shopping malls. It provides merchants with a low-investment, high-return solution for entrepreneurship and income growth, while bringing consumers a convenient, efficient and novel shopping experience.
 |  |
|---|---|
| Outdoor Capsule Convenience Store | Indoor Convenience Store |
Lightweight Deployment, Ready for Operation Upon Launch
It can be deployed in a space of only 10 square meters. With an integrated packaged equipment design, it supports relocation at any time and features flexible site selection with no restrictions. The platform provides one-stop deployment services, including configuration of core service modules such as account activation, customer service, payment collection, after-sales support and monitoring. It also offers initial configuration guidance and online training for backend binding, operation management, store management and standard commodity SKU specifications. No complicated preparation is required, and operation can be launched immediately after power-on.
Full-process Automation, Labor Cost Saving
It forms a closed-loop service workflow: Offline Ordering Screen / Online Scan-to-Order — Automatic Robot Picking & Dispatching — Real-time Payment & Settlement. The entire process requires no manual intervention, completely freeing manpower. The robot is always on standby for immediate picking and delivery with fast response, ensuring service efficiency while greatly reducing labor and management costs.

Diversified Revenue Growth with Rich Marketing Tools
It comes with a mature online mall entrance. In addition to daily general merchandise, seasonal gifts and other categories can be launched to expand profit channels. Built-in promotional functions such as full-reduction, flash sales, exchange coupons and discount coupons help merchants improve conversion rates. The real-time payment function optimizes financial accounting and eases capital turnover pressure.
Data-driven Operation for Scientific Decision-making
The system is equipped with sales statistics, report query and export functions. Through accurate analysis of commodity sales data, it provides merchants with professional guidance on inventory allocation, product/service replacement, stock management and price optimization. It helps optimize product structure, reduce compliance risks, increase usage and service volume, and achieve refined operation.
24/7 Full-time Operation with Brand Influence
Unrestricted by business hours, it provides round-the-clock services to maximize revenue potential. Benefiting from brand influence, the novel robotic picking model attracts public attention. Supporting facilities such as robotic coffee machines can further enhance brand appeal and deepen consumer impression.
Intelligent Management & Scheduling for Worry-free Operation
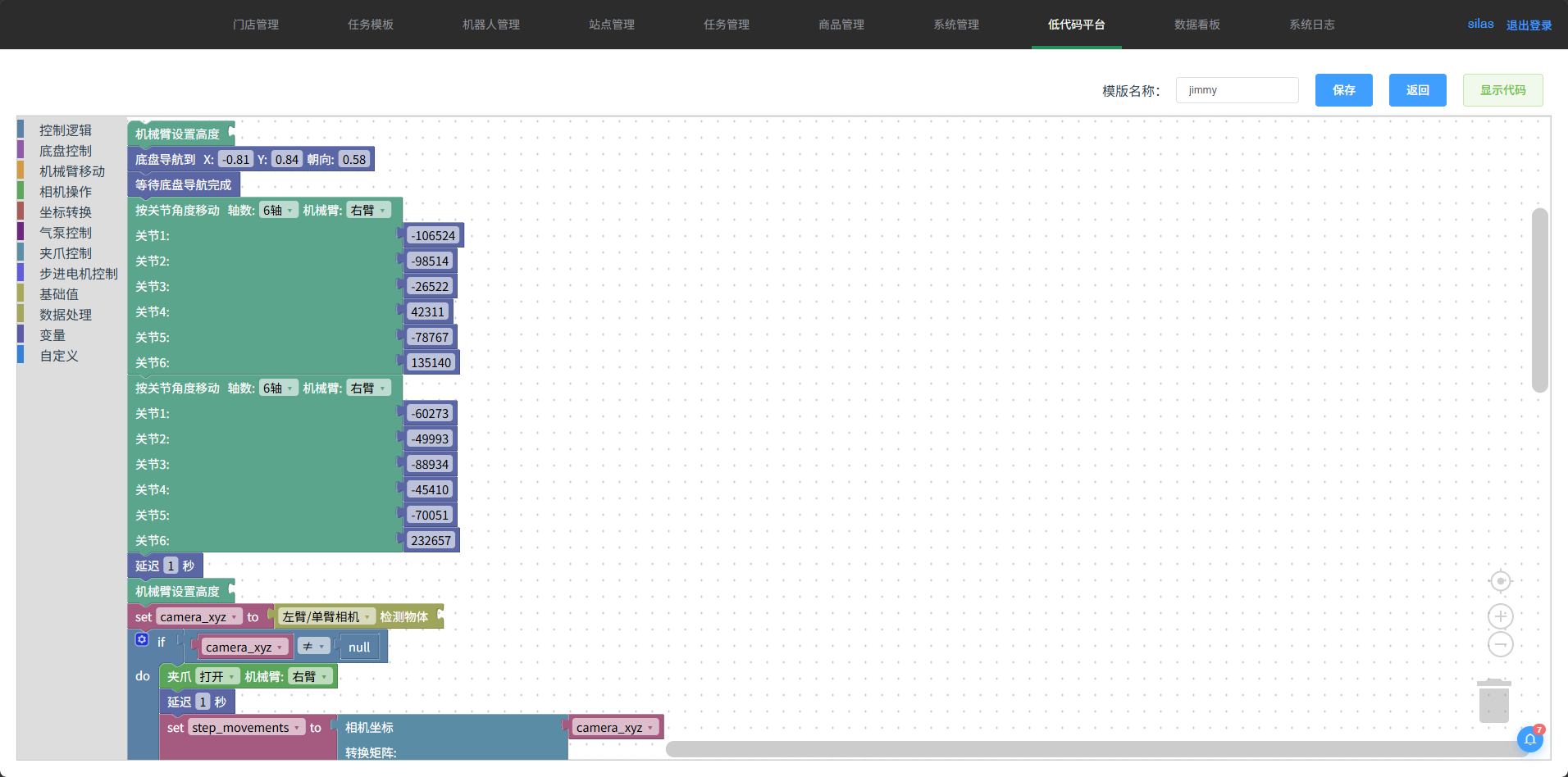
The supporting intelligent management and scheduling system includes functional modules: store management, task templates, robot management, station management, task management, commodity management, system management, low-code platform, and system logs, supporting daily operation of robotic lightning warehouses. The low-code platform is a graphical programming module that enables users to complete basic robot control and motion planning, and quickly build robot tasks.
Professional Operation Support with Worry-free After-sales Service
A dedicated professional operation team provides comprehensive support including usage consultation, abnormal order inquiry, refund assistance, and account activation/deactivation. A nationwide network of professional engineers ensures installation timeliness in county-level cities. It features a unique nationwide 7×24-hour after-sales service mechanism to respond to various issues at any time.

Configuration List
| Name | Quantity | Purpose |
|---|---|---|
| Space Capsule | 1 | Independent outdoor operating space supporting convenience store operation. Can also be deployed in independent indoor spaces. |
| Compound Lifting Robot (Dedicated Gripper) | 1 | Serves as the store clerk of the convenience store, responsible for picking goods according to orders and delivering them to designated positions. |
| Shelf | 2 | Used for goods storage. |
| Management and Scheduling System | 1 | Includes modules such as store management, task templates, robot management, station management, task management, commodity management, system management, low-code platform and system logs to support lightning warehouse operation. |
| Payment System | 1 | Supports the complete process of online ordering and payment. |
Specification Parameters
| Name | Quantity | Parameters |
|---|---|---|
| Space Capsule | 1 | 1. Floor area: 9 square meters. |
| 2. 3000×3000×3000 mm (Height × Width × Depth). | ||
| 3. Integrated ordering area, pickup area, shelves and video surveillance. | ||
| 4. Supports 24-hour uninterrupted operation. | ||
| Management and Scheduling System | 1 | It includes functional modules such as store management, task templates, robot management, station management, task management, commodity management, system management, low-code platform and system logs to support the operation of lightning warehouses. |
| Payment System | 1 | Supports the complete process of online ordering and payment. |
| Compound Lifting Robot | 1 | 1. The robot is responsible for goods picking and delivery. Overall composition: no less than 1 main control module, 1 guide rail, 1 mobile base, 1 six-axis robotic arm, 1 end-effector and 1 depth vision sensor. |
| 2. Overall robot height: no less than 1600mm. | ||
| 3. Overall robot weight: no more than 95kg. | ||
| 4. Power supply for robot charging: single-phase three-wire ~220V±10% 50Hz. | ||
| 5. Robot working environment: temperature 0℃~50℃, relative humidity ≤85% (25℃), altitude <4000m. | ||
| 6. Robot safety protection: The robot body is equipped with laser scanning obstacle avoidance, vision obstacle avoidance and emergency stop; the robotic arm has collision emergency stop function. | ||
| 7. External interfaces: network port, USB port, HDMI port. | ||
| 8. Effective stroke of robot lifting mechanism: 0~1m. | ||
| 9. Running speed of lifting mechanism: no less than 245mm/s. | ||
| 10. Main Control Module: a. Core Module: Equipped with a 6-core Carmel architecture @V8.2 64-bit CPU with no less than 384 CUDA cores and 48 Tensor Cores, plus 2 NVDLA deep learning accelerator engines; b. Hardware Configuration: At least 1 integrated cooling fan; 1 fan power interface; 2 CSI camera interfaces; 40PIN IO interface; 1 DC power interface; 1 HDMI interface; 1 DP interface; no less than 4 USB ports; 1 Gigabit Ethernet port; 1 MicroUSB OTG interface; c. GPU: NVIDIA Volta™ architecture; d. Video Memory: 8 GB 128-bit LPDDR4x, 59.7GB/s; e. Storage: No less than 128G; f. Dimensions: Main control body ≤ 110mm×90.5mm×34mm | ||
| 11. Six-axis Robotic Arm: a. Material: Aluminum alloy; b. Degrees of Freedom: No less than 6 DOF; c. Working Radius: No less than 600mm; d. Repeat Positioning Accuracy: ±0.05mm; e. Rated Payload: No less than 4.8kg; f. Controller: Integrated into the robotic arm body; g. Net Weight (including controller): No more than 7.3kg; h. Rated Input Voltage: 24V; i. Power Consumption: Max power ≤200W, comprehensive power ≤100W; j. Protection Grade: Not lower than IP54; k. Controller Interfaces: 1×RJ45 port, 2×USB ports, 1 external 16-core expansion interface including power supply, IO and communication; l. Control Modes: At least 4 types, including drag teaching, teach pendant, API and RS485; m. Communication Modes: At least 4 types, including Wi-Fi, network port, USB serial port and RS485; n. Supported Programming Languages: C, C++, C#, Python with sample programs provided; o. Joint Motion Range: J1±178°, J2±130°, J3±135°, J4±178°, J5±128°, J6±360°; p. Maximum Joint Speed: J1-J2 ≥170°/s, J3-J6 ≥210°/s; q. End-effector Integration: The end is equipped with at least 2 reusable IO ports switchable between digital input and digital output; output power ≥24V 1.5A; at least 1 RS485 interface supporting MODBUS RTU protocol; r. Supporting Resources: Equipped with a dedicated multi-platform teach pendant system; supports tool calibration, workpiece coordinate system calibration and collision level setting; provides corresponding URDF files for MoveIt-based simulation planning, ROS function packages, robotic arm user manual and ROS operation manual; provides SDK for both Windows and Linux versions; s. Maintenance: Equipped with diagnostic tools; power-off zero position storage function; joint abnormal state protection; t. Documentation: Provides 4 electronic documents including Linux basic tutorial, Python basic tutorial, robotic arm ROS tutorial and training manual; u. Teach Pendant & Load Demonstration: On-site 5kg load operation demonstration is required; the demonstration action includes joint 2 rotating ±90° while other joints remain at 0°, repeated for 3 cycles; cross-platform teach pendant demonstrates jogging motion and online programming on Windows and Linux systems; v. Equipped with dedicated gripper. | ||
| 12. Mobile Base Parameters: a. Dimensions: Diameter ≤510mm × Height 280mm; b. Self-weight: No more than 45kg; c. Load Capacity: Rated load ≥50kg, maximum load ≥75kg; d. Wheel System: No less than 2 driving wheels, 4 universal wheels and 2 auxiliary wheels; e. Suspension Type: Pendulum active suspension; f. Turning Radius: No more than 253mm; g. Minimum Ground Clearance: No less than 25mm; h. Hub Motor: Servo motor, rated power 200W; i. Moving Speed: Default speed ≥1m/s, maximum speed ≥1.1m/s; j. Maximum Curb Climbing Height: No less than 18mm; k. Maximum Climbing Slope: No less than 10°; l. Minimum Passing Width: No less than 70cm; m. LiDAR: Measuring range 0.02-10m, 240° field of view; distance resolution 1cm; ranging accuracy ±20mm; scanning frequency 30Hz; noise <25dB; n. Ultrasonic Sensors: No less than 3 units; measuring range 0.03~0.55m; viewing angle ≤15°; measurement accuracy up to 0.03m; o. Attitude Sensor: 6-axis IMU inertial measurement unit; p. Anti-collision Sensor: Trigger distance 5-7mm; trigger force less than 20N; q. Power Supply: 18650 lithium-ion battery pack, 25.2V 20Ah (21V-29.4V); r. Working Environment: Temperature 0~40℃; humidity 5%~85%; dust-free, non-corrosive gas and static particle-free environment. | ||
| 13. Vision Sensor: a. Depth Field of View: ≥86°×57°; b. Depth Resolution: 1280×720; c. Optimal Working Range: 0.3m~3m; d. Power Supply: 5V; e. Communication Interface: USB3.0; f. Dimensions: 90mm×25mm×25mm. |
Supporting Resources
The system is equipped with user manuals and secondary development interfaces for user learning and further development.
| Deer Unmanned Pharmacy | Composition of Unmanned Convenience Store | Wuxi Deer Convenience Store Space Capsule |
Bilibili Video Tutorials:
Path 1 - Direct access to Bilibili: Bilibili
Path 2 - Online Section Preview:
| 1-Overview | 2-Product Overview | 3-1 PC and Robot Connection |
| 3-2 Connect Chassis | 3-3 Connect NX Main Controller | 3-4 Connect Robotic Arm Teach Pendant |
| 4-1 Chassis Mapping | 4-2 Chassis Map Calibration | 5-Robotic Arm |