解决方案:
机器人便利店 概述
机器人智慧便利店是一种利用机器人来充当店员的具身智能便利店。便利店占地10㎡,可实现全天候自主运营,售卖饮品、小食等高频消费品类。便利店由太空舱、机器人及点单系统组成,可以像人工便利店一样运营,但是没有人工成本。其中配套的机器人是一款面向新零售与智慧门店场景打造的智能服务机器人,集自主导航、智能识别抓取于一体,可在便利店内灵活行走,根据顾客订单取拿商品并交付,为顾客提供具身智能时代的真实应用体验。
产品介绍
在新零售与智能化浪潮的推动下,智能便利店机器人以机器人 + 太空舱 + 小程序的创新模式横空出世,仅需 10㎡即可快速搭建起一家功能完备的智能便利店。它打破了传统便利店的运营边界,无需人工值守,实现24小时全时段自动化服务,适配网红街、公园、写字楼、社区、商场等多种户外及半户外场景,为商家提供小投入、高回报的创业与增收解决方案,也为消费者带来便捷、高效、新奇的购物体验。
 |  |
|---|---|
| 室外太空舱便利店 | 室内便利店 |
轻量部署,落地即开张
仅需 10㎡空间即可落地,设备整体打包设计,支持随时迁移,选址灵活无束缚。平台提供一站式搭建服务,包括账户开通、客服、收款、售后、监控等核心服务模块配置,以及后台绑定、操作管理、门店管理、商品 SKU 标准规格等首次配置指导与线上培训,无需复杂筹备,开机即可启动运营。
全流程自动化,节省人力成本
构建线下点单屏 / 线上扫码下单 — 机器人自动拣货出货 — 实时收款结算 的闭环服务,全程无需人工干预,彻底解放人力。机器人随时待命,直拣出货,响应迅速,既保障了服务效率,又大幅降低了人工与管理成本。

多元增收,营销工具丰富
拥有成熟的线上商城入口,除常规小商品外,还可上线节日礼品等多种品类,拓宽盈利边界。同时内置商品满减、限时秒杀、兑换券、抵扣券等丰富促销功能,助力商家提升消费转化;“实时收款” 功能让财务核算更高效,减少资金周转压力。
数据化运营,科学优化决策
系统自带销售数据统计、报表查询与导出功能,通过对商品销售情况的精准分析,为商家提供专项铺货建议、商品 / 服务汰换、库存管理、价格优化等指导,帮助商家优化货品结构,降低违规风险,提升使用量与服务量,实现精细化运营。
24小时全时段运营,品牌效应加持
不受时间限制,全天候为消费者提供服务,最大化挖掘营收潜力。依托品牌影响力,“机器人拣货” 的新奇模式自带话题度,搭配机器人咖啡机等配套设施可进一步提升品牌吸引力,增强消费者记忆点。
智能管理和调度,省心运营模式
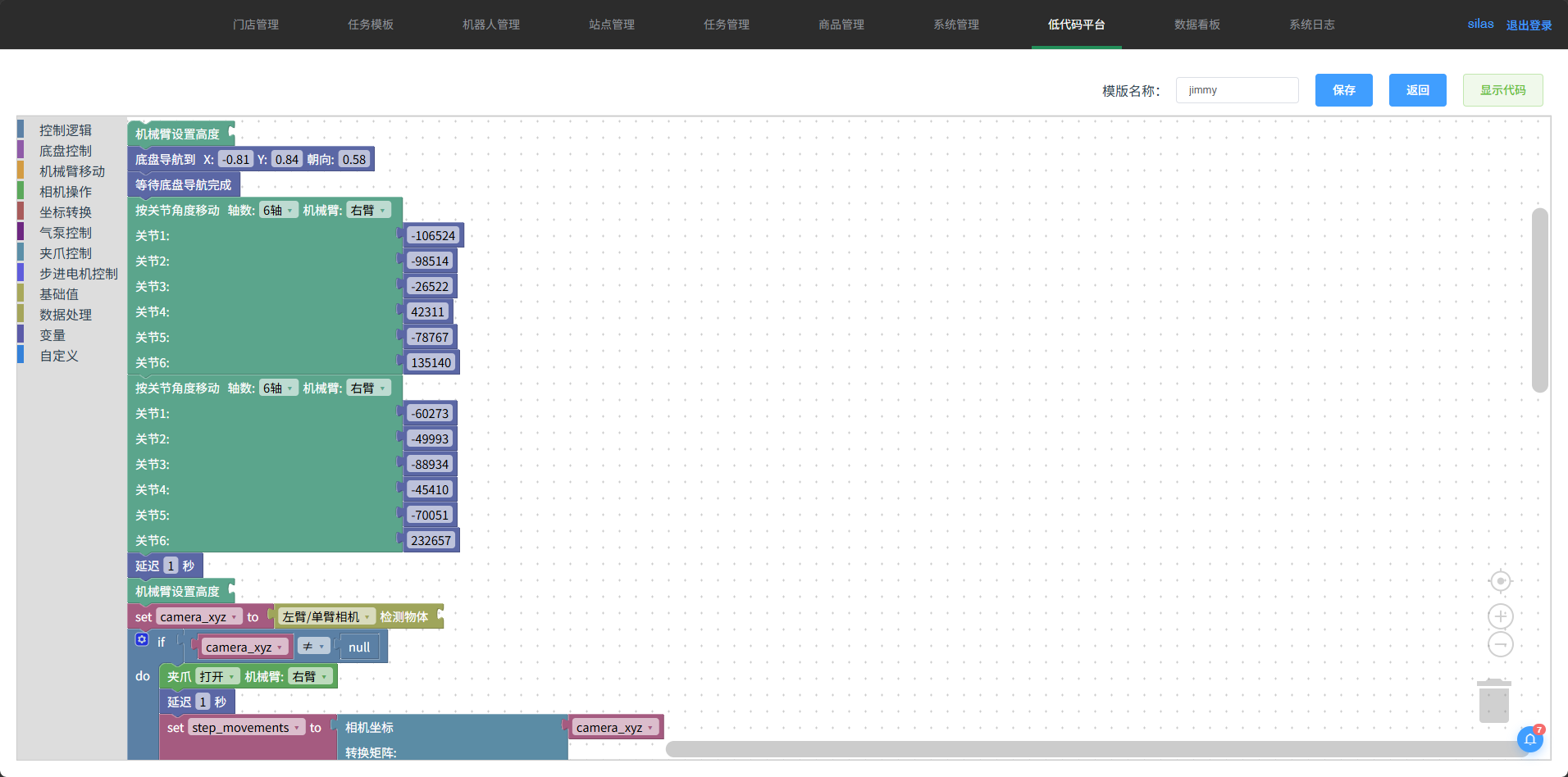
本系统配套一套智能管理调度系统,包括门店管理、任务模板、机器人管理、站点管理、任务管理、商品管理、系统管理、低代码平台、系统日志等功能模块,支持机器人闪电仓的日常运行。低代码平台是一套图形化的编程模块,用户可以通过该模块完成机器人的基本控制、运动规划,实现机器人任务的快速构建。
专业运营保障,售后无忧
配备自有专业运营团队,提供使用答疑、异常订单查询、退款协助、账号管理(开通或关闭)等全方位运营支持。全国专业工程师部署与运维网络,保障县级市安装时效,全国唯一 7×24 小时售后服务机制,随时响应各类问题。

配置清单
| 名称 | 数量 | 用途 |
|---|---|---|
| 太空舱 | 1 | 室外独立运营空间,支撑便利店运行。 也可以在室内独立空间部署。 |
| 复合升降机器人(专用夹爪) | 1 | 便利店“店员”,负责按订单取货并送到指定位置。 |
| 货架 | 2 | 用于存放商品。 |
| 管理调度系统 | 1 | 包括门店管理、任务模板、机器人管理、站点管理、任务管理、商品管理、系统管理、低代码平台、系统日志等功能模块,支撑闪电仓运营。 |
| 支付系统 | 1 | 支持在线下单、支付完整流程。 |
规格参数
| 名称 | 数量 | 参数 |
|---|---|---|
| 太空舱 | 1 | 1. 占地面积:9 平方米。 |
| 2. 3000×3000×3000 mm(高 × 宽 × 深)。 | ||
| 3. 集成点单区、取餐区、货架、视频监控。 | ||
| 4. 支持24 小时全时段不间断运营。 | ||
| 管理调度系统 | 1 | 包括门店管理、任务模板、机器人管理、站点管理、任务管理、商品管理、系统管理、低代码平台、系统日志等功能模块,支撑闪电仓运营。 |
| 支付系统 | 1 | 支持在线下单、支付完整流程。 |
| 复合升降机器人 | 1 | 1. 机器人负责拣货和出货,整体组成:不少于1个主控模块、不少于1个导轨、不少于1个移动底盘、不少于1条六轴机械臂、不少于1个末端执行器、不少于1个深度视觉传感器。 |
| 2. 机器人整体尺寸:总高不低于1600mm。 | ||
| 3. 机器人整体重量:不高于95kg。 | ||
| 4. 机器人充电电源:单相三线~220V±10% 50Hz。 | ||
| 5. 机器人工作环境:温度0℃~50℃,相对湿度≤85%(25℃),海拔<4000m。 | ||
| 6. 机器人安全保护:机器人本体具有激光扫描避障、视觉避障、紧急停止,机械臂应具备碰撞急停功能。 | ||
| 7. 机器人对外接口:网口、USB口、HDMI接口。 | ||
| 8. 机器人升降机构有效执行距离:0~1m。 | ||
| 9. 机器人升降机构执行速度:不下于245mm/s。 | ||
| 10. 主控模块: a. 核心模组:搭载1个不少于384 个 CUDA 核心、不少于48 个 Tensor Core、6 核的 Carmel架构@V8.2 64bit CPU和2个深度学习加速器(NVDLA)引擎的核心模组; b. 硬件配置:不少于1个一体式散热风扇;不少于1个风扇供电接口;不少于2个CSI摄像头接口;不少于40PIN IO接口;不少于1个电源DC接口;不少于1个HDMI接口;不少于1个DP接口;USB接口不少于4个;不少于1个千兆网口;不少于1个MicroUSB OTG接口; c. GPU:NVIDIA Volta™ 架构; d. 显存:8 GB 128位LPDDR4x 59.7GB/s ; e. 存储:不小于128G; f. 尺寸:主控主体尺寸不大于110mm x 90.5mm x 34mm | ||
| 11. 六轴机械臂: a. 材质:铝合金; b. 自由度:不少于6个自由度; c. 工作半径:不小于600mm; d. 重复定位精度:±0.05mm; e. 额定负载:不小于4.8kg; f. 控制器:集成于机械臂本体; g. 净重(含控制器):不大于7.3kg; h. 额定输入电压:24V; i. 功耗:最大功耗≤200W,综合功耗≤100W; j. 本体防护等级:不小于IP54; k. 控制器接口:1个RJ45接口、2个USB接口、1个外部16芯扩展接口,包含供电、IO、通信; l. 控制方式:不少于4种,包含拖动示教、示教器、API、RS485; m. 通讯方式:不少于4种,包含WIFI、网口、USB串口、RS485; n. 支持编程语言:支持C、C++、C#、Python,并提供各编程语言的示例程序; o. 关节运动范围:J1±178°、J2±130°、J3±135°、J4±178°、J5±128°、J6±360°; p. 关节最大速度:J1-J2不小于170°/s、J3-J6不小于210°/s; q. 机械臂末端集成:末端至少包含2个可复用IO,可在数字量输入与数字量输出之间切换;输出电源不小于24V1.5A;不少于1路RS485接口,支持MODBUSRTU通信协议; r. 配套资源:须提供适配机械臂的示教器系统,且示教器支持多平台使用。示教器中可进行工具标定、工作坐标系标定、碰撞等级设置;提供机械臂相对应的URDF文件,可进行基于Moveit的仿真规划;提供ROS功能包;1份机械臂的用户手册;1份机械臂的ROS使用书;须提供windows与Linux 2个版本的SDK文件; s. 维护:提供诊断软件工具;具备断电零位保存功能;具备关节异常状态保护; t. 设备需提供Linux基础教程、Python基础教程、机械臂ROS使用教程、机械臂实训手册共4份电子文档供设备后续使用; u. 示教器及负载演示:投标现场需进行机械臂负载5公斤运行演示,演示动作包含:机械臂关节2正负90°,其他关节0°,此动作完成3次循环;跨平台机械臂示教器分别在Windows、Linux系统演示示教运动与在线编程实现机械臂运动; v. 配套专用夹爪。 | ||
| 12. 移动底盘参数: a. 外形尺寸:不大于直径 510mmx 高 280(mm); b. 自重:不大于45kg; c. 载重:额定不小于50kg,最大载重不小于75kg; d. 轮系:不少于2个驱动轮,不少于4个万向轮,不少于2个辅助轮; e. 悬挂类型:摆杆式主动悬挂; f. 旋转半径:不大于253mm; g. 最小离地间隙:不小于25mm; h. 轮毂电机:伺服电机,功率200W; i. 底盘移动速度:默认不小于1m/s,最大速度不小于1.1m/s; j. 最大越坎高度:不小于18mm; k. 最大爬坡:不小于10°; l. 最小通过距离:不小于70cm; m. 激光雷达:测量距离0.02-10m,240°;距离分辨率1cm;测距精度±20mm;扫描频率30hz;噪音<25dB; n. 超声波传感器:数量不少于3个;测量距离0.03~0.55m;测量角度不大于15°;测量精度:达0.03m; o. 姿态传感器:IMU六轴姿态传感器; p. 防撞传感器:触发距离5-7mm;启动力小于20N; q. 电源:18650锂离子电池组,25.2V 20Ah(21V-29.4V); r. 工作环境:温度0~40℃;湿度5%~85%;无扬尘、无腐蚀气体、无静电粒子。 | ||
| 13. 视觉传感器: a. 传感器深度视场角:≥86°×57°; b. 传感器深度分辨率:1280×720; c. 传感器理想使用范围:0.3m~3m; d. 传感器供电:5V; e. 传感器通讯:USB3.0; f. 传感器尺寸:90mm×25mm×25mm。 |
配套资源
系统配套使用手册和二次开发接口,供用户学习和开发。
| 小鹿无人药店 | 无人便利店的组成 | 无锡小鹿便利店太空舱 |
以下为B站视频教程:
路径1-跳转B站:B站视频
路径2-在线分节预览:
| 1-学习概览 | 2-产品概览 | 3-1 电脑与机器人连接 |
| 3-2 连接底盘 | 3-3 连接nx主控 | 3-4 连接机械臂示教器 |
| 4-1 底盘建图 | 4-2 底盘地图校正 | 5-机械臂 |