开源项目:
两指平行夹爪 简介
睿尔曼两指平行夹爪旨在为用户提供易用优质的操作能力。夹爪以自研的 WHJ03 一体化关节为核心部件开发而成,具备高动态响应、高负载、小体积、通用性强、安装方便、维护简单等特点。根据任务需要,夹爪可以灵活方便的部署在复合机器人、机械臂末端、PLC 产线上,从而解决工业、商服、家庭、教育等场景的抓取、分拣、搬运等需求。机器人采用标准的 RS485 通信接口,支持串口协议和Modbus RTU协议,简单高效的接口和控制指令可以使用户快速实现对夹爪的操控。
睿尔曼还为夹爪配备了上位机软件,通过设置不同加持力矩、速度、位置等参数,满足对不同质地形状目标的操作需求。

具体特点如下:
- 高动态响应: 开口尺寸为 65mm,单程开合时间达到 0.4s;
- 负载密度大: 自重只有 0.5kg 左右,额定负载达到 4kg,最大负载高达 5kg;
- 通用性强: 夹爪配备 6 芯航插和 6 芯 PH2.0 端子两种 RS485 接口,支持串口协议、Modbus RTU 协议、I/O 控制;
- 易用性强: 多种控制模式,容易操控,适合多种场景;
- 技术方案开源: 夹爪的技术方案全部开源,推动行业发展。
硬件设计
相关硬件已开源,如需下载请参考相关下载。
主体结构
两指平行夹爪的主体结构如下:
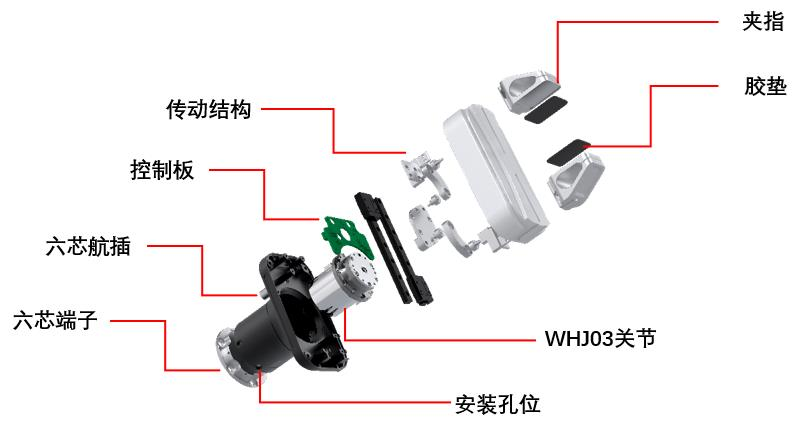
- WHJ03 关节:WHJ03关节作为两指平行夹爪的核心动力模块,输出力和运动,详情请查阅WHJ03 关节;
- 传动机构:传动机构是将关节的回转运动转为直线运动的主要机构;
- 控制板:控制板提供关节控制、RS485 通信、系统供电、扩展接口等功能;
- 通讯接口:通讯接口采用六芯航插头和六芯PH2.0端子;
- 夹指:夹指分为标准夹指和扩展夹指,是夹爪执行操作功能的直接结构。
三维模型
两指平行夹爪的三维模型图,请参考获取的开源文件中Hardware > CAD路径下的 RMG24夹爪三维模型(20241022) 文件,两指平行夹爪的外观尺寸,如下图所示: 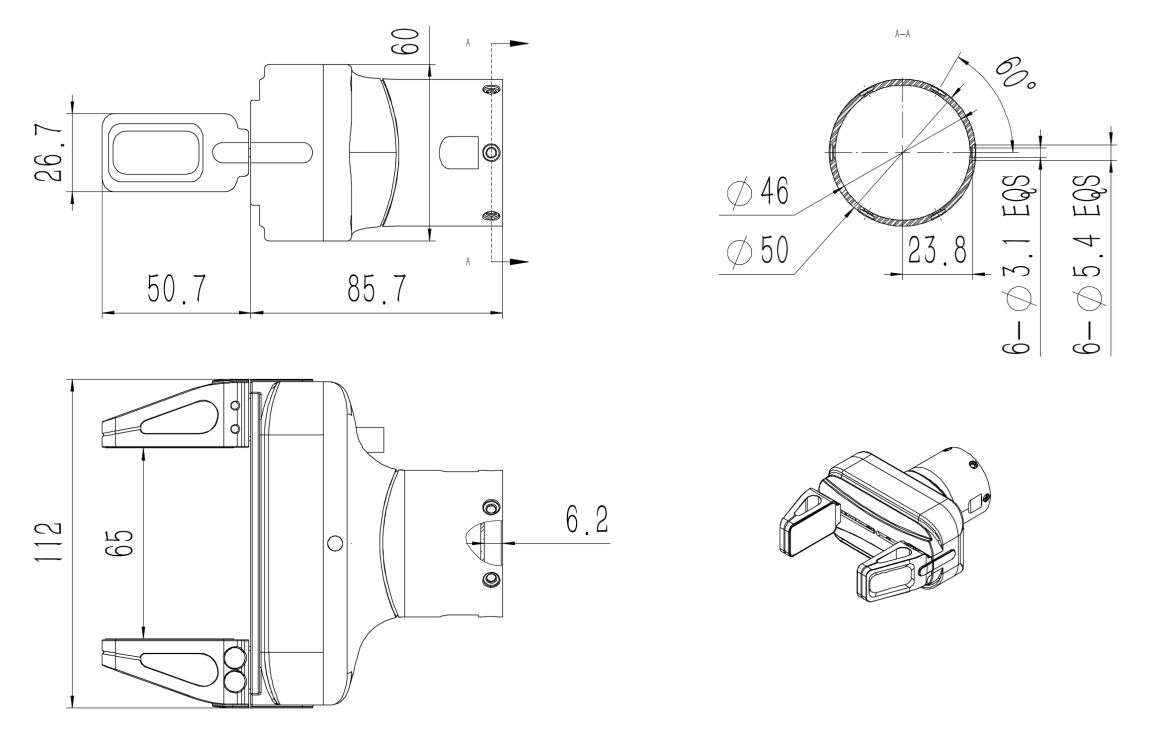
控制板
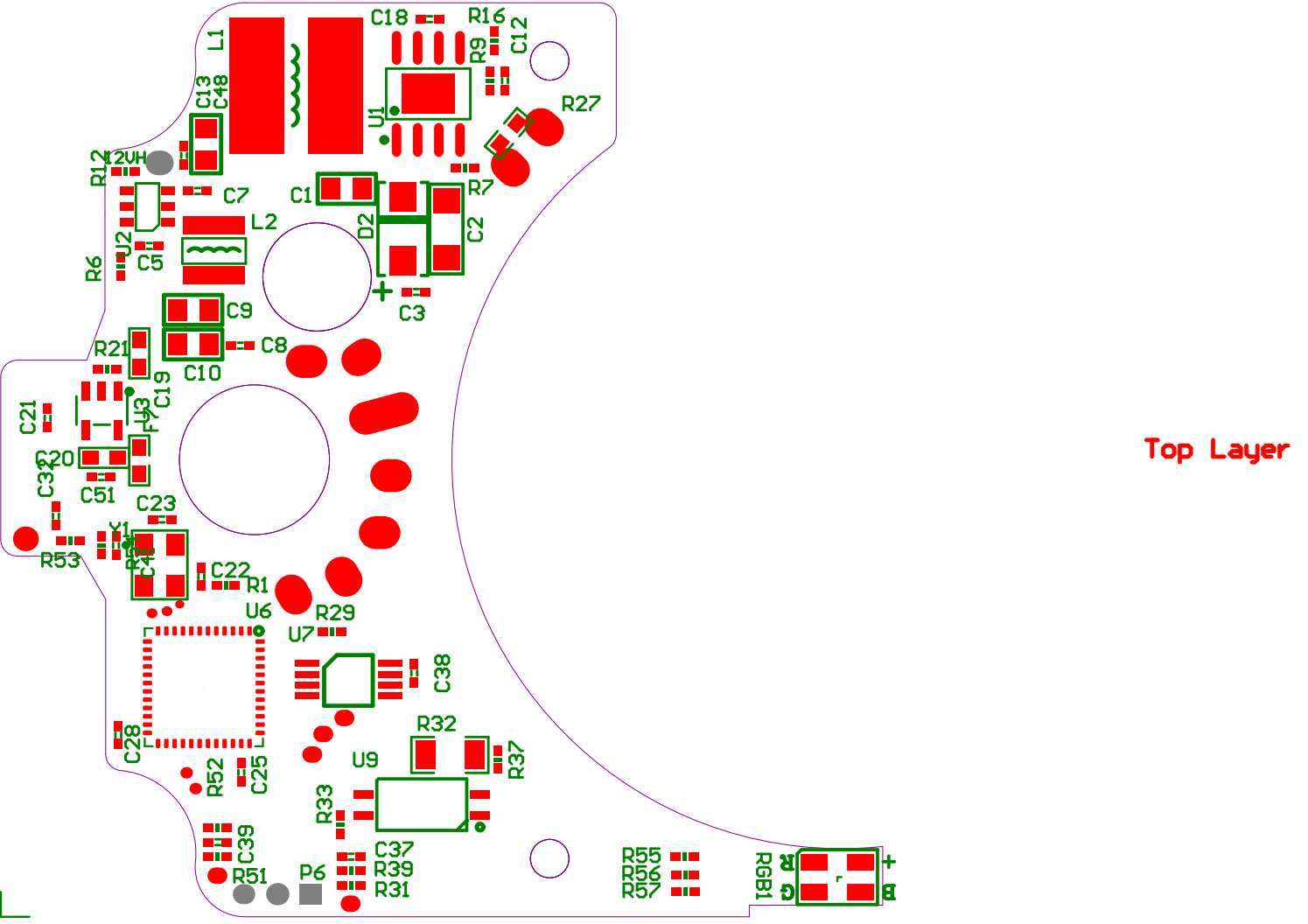
硬件系统
两指平行夹爪硬件系统,如下图所示: 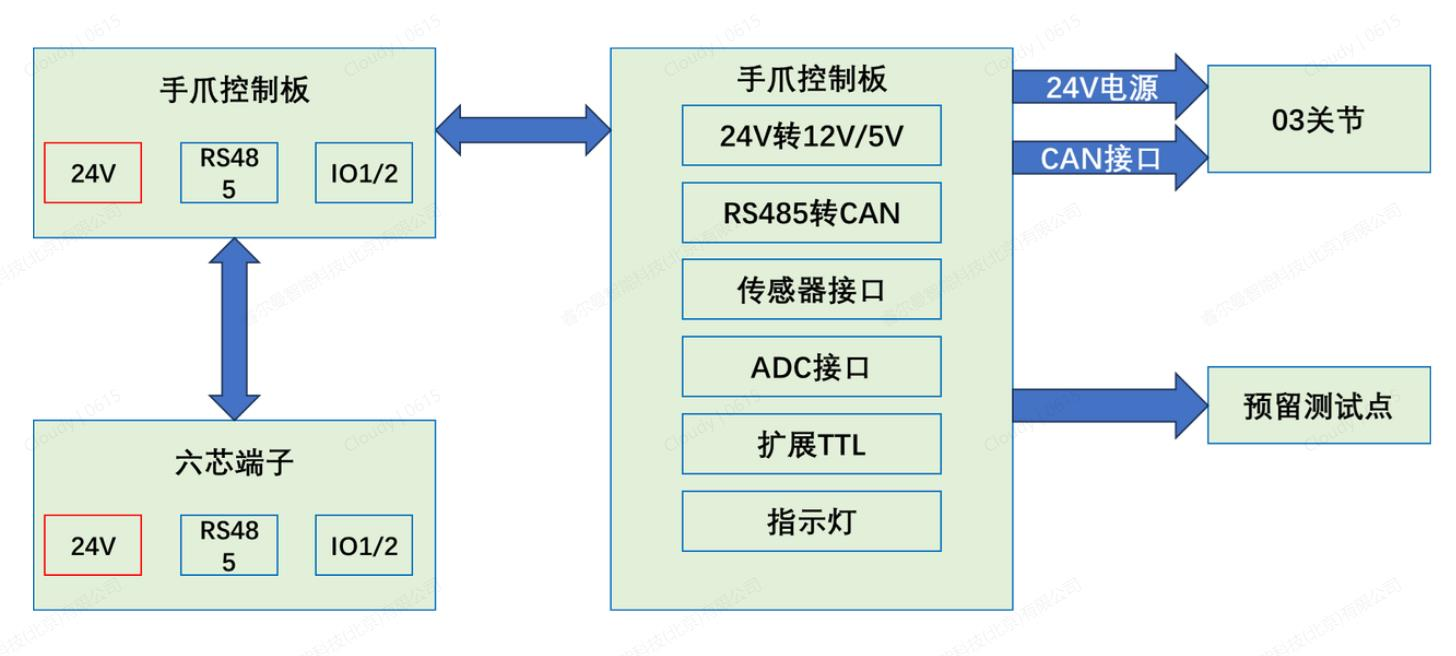
单板制作
单板制作可参考获取的开源文件中Hardware > Gerber Files路径下的相关文件,或通过Hardware > PCB路径下的TURN PCB20240806.PcbDoc文件生成对应的Gerber文件进行单板制作。
注意
Gerber Files推荐使用华秋dfm软件打开,TURN PCB20240806.PcbDoc为PCB格式文件,推荐使用Altium Designer软件打开。
焊接元器件
元器件焊接可参考获取的开源文件中Hardware > SCH路径下的PG_V0_20240806.SchDoc文件,或Hardware路径下的BOT PCBV2和TOP PCBV2文件进行焊接。
注意
PG_V0_20240806.SchDoc为SCH格式文件,推荐使用Altium Designer软件打开。

BOM
控制板的BOM信息,请参考获取的开源文件中Hardware > BOM路径下的夹爪转接板BOM 20240821文件。
通信接口
两指平行夹爪采用6芯航插、6芯PH2.0端子的通信接口。
接线定义
6芯航插:
- 自定义航插,体积小,可直接对接RM机械臂,便于使用;
- 因其他机械臂厂家的芯数和线序都不一样,需要根据线序功能重新进行排序;
- 支持两个IO接口,因为两指平行夹爪主要用于机械臂,所以只需要保留RS485和Modus-RTU接口,就能满足大多数需求。
6芯PH2.0端子:
在手爪安装座底端固定安装母头;与机械臂端盖输出的6芯端子公头连接,实现内走线,避免了两指平行夹爪在抓取过程中外走线造成的干涉。


线序和功能
6芯航插和6芯PH2.0端子的线序和功能相同,如下表所示:
| 线序号 | 颜色 | 注释 | 说明 |
|---|---|---|---|
| 1 | 黄 | RS485_A | RS485通讯A+ |
| 2 | 白 | RS485_B | RS485通讯B- |
| 3 | 红 | DI1/DO1 | I/O复用接口1 |
| 4 | 黑 | DI2/DO2 | I/O复用接口2 |
| 5 | 绿 | 电源GND | 电源负极 |
| 6 | 蓝 | 电源输入24V | 电源正极 |
软件资源
目前已开源软件代码,请访问相关下载下载,后续会持续升级更新。
软件源码
以下为两指平行夹爪开源的应用程序、boot程序以及上位机源码,参考获取的开源文件中Software路径下对应源码文件。
| 序号 | 名称 | 说明 |
|---|---|---|
| 1 | gripper_app | 夹爪控制板应用程序源码 |
| 2 | gripper_boot | 夹爪控制板boot程序源码 |
| 3 | gripper_tool | 两指夹爪上位机源码 |
上位机
主控单元可以通过上位机对两指平行夹爪进行参数配置、模式控制、协议I/O控制、状态监测和固件升级。
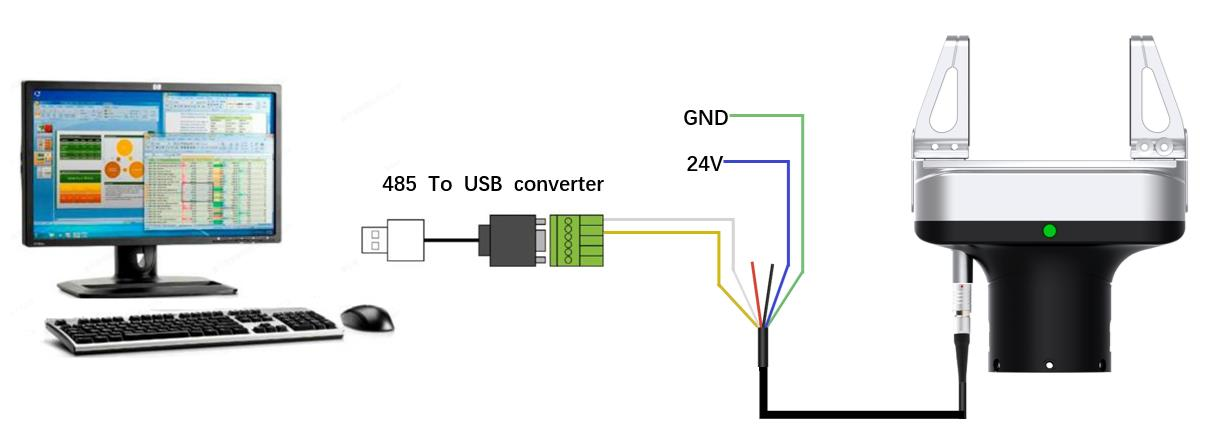
接线
主控单元可以通过RS485转USB直连两指平行夹爪,然后通过上位机软件对夹爪进行控制。
具体连线方式为:
- 夹爪的蓝绿2根线分别接24V和GND;
- 夹爪的黄白2根线接RS485_A、RS485_B,485模块要和夹爪电源共地;
由于上位机部署在PC端,接口多为USB,因此用户需要配备USB转485模块,将夹爪的黄白2根线接在USB转485模块上,进而实现PC端的上位机通过USB控制夹爪的目标,线序说明请参考线序和功能。如下图所示:
软件安装
上位机软件为绿色免安装版,压缩包中包含exe文件和相关的依赖文件。解压至指定位置后,可以直接运行exe文件来启动程序,免安装,免登录。
上位机界面如下:
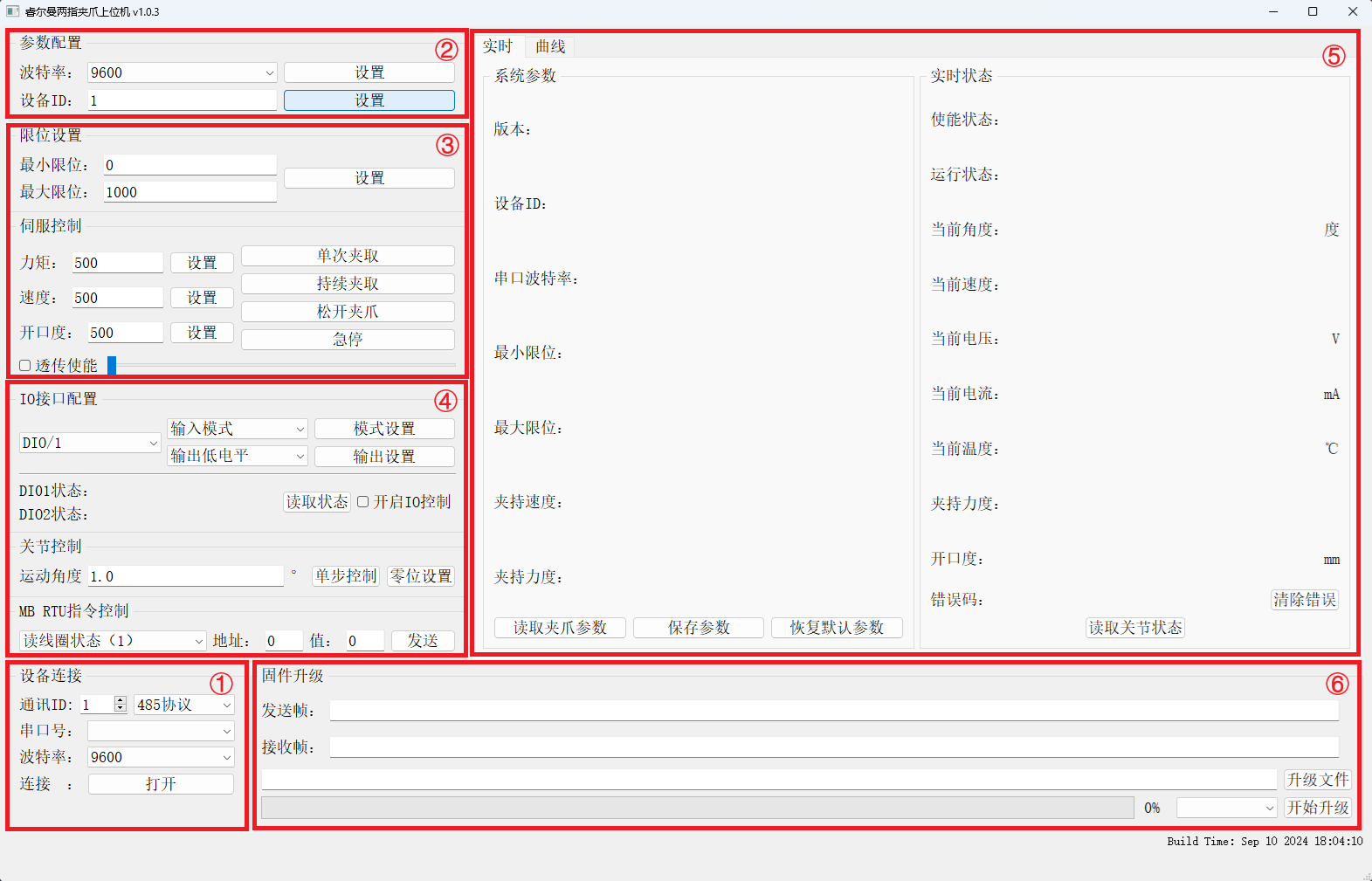
上位机调试
连接/断开: 夹爪通过RS485转USB连接到主控单元,在主控单元打开上位机软件,首次连接输入设备出厂默认 ID、串口号、波特率 115200,点击
打开即会显示连接成功;点击关闭即会断开连接。参数设置: 可以设置波特率,设备ID,等参数。参数设置完成后,在状态监测区域点击
读取夹爪参数,即可显示设备所有参数。模式控制: 在模式控制中可以设置夹爪的限位、力矩、速度、位置等,具体如下:
- 最大/最小限位:上位机设置夹爪的最大最小的极限位置;参数范围为0-1000,无量纲,0对应开口尺寸为0mm,1000对应标准夹指的开口尺寸65mm;
- 力矩:上位机设置夹爪以输入的速度和力控阈值去夹取,当夹持力超过设定的力控阈值后,夹爪停止运动;参数范围为0-1000,无量纲,1000 对应额定负载4kg;
- 速度:设置夹爪开合速度值,控制夹爪在工作过程中的开合速度。参数范围为0-1000,无量纲,其中1000对应达成开合时间为0.4s;
- 开口度:设置夹爪的开口尺寸,夹爪接受到这条指令后,如果夹爪当前开口尺寸与设定开口尺寸不同,则夹爪以设定速度运动到开口尺寸,达到目标开口尺寸后停止运动;参数范围为0-1000,无量纲,其中1000对应开口位置为标准夹指的65mm。位置参数应小于最大限位;
- 打开:夹爪以设置的固定速度(最大速度)将夹爪松开到最大开口位置;
- 闭合:夹爪以设置的固定速度(最大速度)将夹爪闭合到最小开口位置;
- 力矩夹取:夹爪以设置的速度和力矩去夹取,当夹持力超过设定的力矩值后,夹爪停止运动;当夹爪停止运动后,如果检测到夹持力小于力矩值时,夹爪会继续夹取直到夹持力超过设定的力矩值;
- 透传使能:是为睿尔曼的遥操作的高动态响应功能开发,打开
透传使能功能后,遥操作的主动爪将以较高的速度响应从动爪的控制,从而便于用户进行低延迟的遥操作和采集数据。
协议/IO:
- IO 接口配置:用于配置2个IO接口的输入输出参数。具体操作如下:
- 设置:1)选择接口DIO/1或DIO/2;2)选择
输入模式或输出模式,点击模式设置;3)对于输入模式,不需要设置;对于输出模式,则可以设置输出高电平、输出低电平;4)点击输出设置,完成该接口的输出参数的配置。 - 查询:完成设置两个接口后,点击
读取状态,可查询两个IO 接口的状态。 - 控制:IO 控制可以选择开启、关闭,默认为输入模式。
- 设置:1)选择接口DIO/1或DIO/2;2)选择
- 关节控制:夹爪在工作一段时间之后,通过关节控制来手动实现零位设置。具体操作如下:
- 闭合夹爪:点击夹爪的
闭合按钮,夹指闭合到最小位置; - 手动调整:根据实际情况,在
运动角度框中输入需要关节运动的角度,点击运动从而手动控制夹指运动,然后观察状态监测区的实时电流曲线的变化,当夹指完全闭合,且实时电流曲线显示为空载电流时; - 零位设置:点击
零位设置,即完成了零位校准功能,校准完成需重启设备。
- 闭合夹爪:点击夹爪的
- MB RTU 指令控制:用于出厂的协议指令功能的调试测试。
- IO 接口配置:用于配置2个IO接口的输入输出参数。具体操作如下:
状态监测区: 状态监测区通过
读取夹爪参数可以显示设置的设备 ID、波特率、最大/最小限位、夹持速度、夹持力度等参数,显示软件的版本号。通过读取关节状态,可以显示关节的使能、运行状态、角度、速度、电压、电流、温度、力度、开口度、错误码等,并可以执行清除错误操作。固件升级: 点击
升级文件,找到升级文件所在的位置,选择要升级的模块:控制板、关节,点击开始升级后,进度条会显示升级进度。
通信协议
两指平行夹爪的相关通信协议,请参考《Two-Finger Parallel Gripper User Manual V1.0》中的通信协议章节。
通过睿尔曼机械臂控制两指平行夹爪相关通信协议,可根据需要参考如下对应内容:
- JSON协议:末端工具指令集(选配)
- API2 (C、C++):末端工具夹爪配置
- API2 (Python):末端工具夹爪配置
其他相关参考
两指平行夹爪的相关资料如下,请访问相关下载中的Related Files路径获取。
| 序号 | 名称 | 说明 |
|---|---|---|
| 1 | Two-Finger Parallel Gripper User Manual V1.0 | 主要介绍了产品简介、参数、配件以及通信协议等两指平行夹爪的安装调试使用的方法和接口。 |
| 2 | Two-Finger Parallel Gripper Product Design Specification | 主要介绍了产品设计的需求分析、定义和设计流程以及硬件、软件的相关设计理念和参数。 |
| 3 | Two-Finger Parallel Gripper Test Cases | 整理了两指平行夹爪产品的测试用例,供用户参考借鉴。 |
相关下载
| 序号 | 名称 | 下载地址 | 说明 |
|---|---|---|---|
| 1 | Software | 下载地址 | 包括gripper_app、gripper_boot、gripper_tool以及两指平行夹爪上位机v1.0.3,用于设置、调试两指平行夹爪。 |
| 2 | Hardware | 包含3D结构图、BOM列表、原理图、PCB Layout、Placement图以及PCB的BOT、TOP图示,支撑硬件控制板、结构件制作以及整体组装。 | |
| 3 | Related Files | 包含产品手册、产品设计说明书以及测试用例,阐明两指平行夹爪的应用场景、功能特点、通信协议、功能参数以及验收测试的用例指导等。 |
版权和许可协议
本项目遵循MIT许可证,详情请阅读Github中的License。