应用集成案例:
检测模型训练教程 一、 项目概述
- 本教程适用于目标数量少、背景简单的任务;适用于未接触过模型训练的新手。
- 本教程引导您通过分阶段训练YOLO检测模型,实现目标检测模型的生成。
流程包括: 采集大量图片 -> 选取少部分训练YOLOv8检测模型 -> 使用该模型检测剩余图片,并人工微调标注数据 -> 以所有标注数据重训出一个更加精准的新模型。 - 推荐使用相机型号包括:D435i、D435、D41、D455、L515、T265,本文以D435为例。
二、相关下载
| 文件类型 | 文件名 | 下载地址 |
|---|---|---|
| 安装包 | Anaconda | 请点击下载地址进入百度网盘空间进行下载。 |
| Labelme | ||
| 文本 | requirements.txt | 请点击下载地址进入Github空间下载对应脚本文件。 |
| 脚本 | data_collect.py | |
| final.py | ||
| txt2json.py | ||
| yolov8.py |
三、python环境安装
Anaconda在环境隔离、包管理方面功能强大,本文以安装Anaconda为例来构造python环境。其中Anaconda安装包版本以Anaconda3-2024.10-1-Windows-x86_64.exe为例。
打开相关下载章节中下载的Anaconda安装软件,点击
Next。
点击
I Agree。
勾选安装类型后,点击
Next。
点击
Browse...选择安装路径,然后单击Next。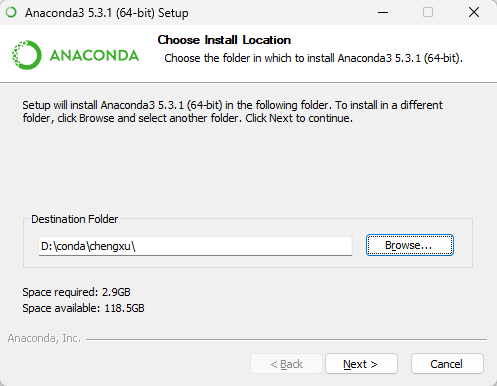
勾选
Add Anaconda to the system PATH environment variable和Register Anaconda as the system Python 3.7,然后点击Install。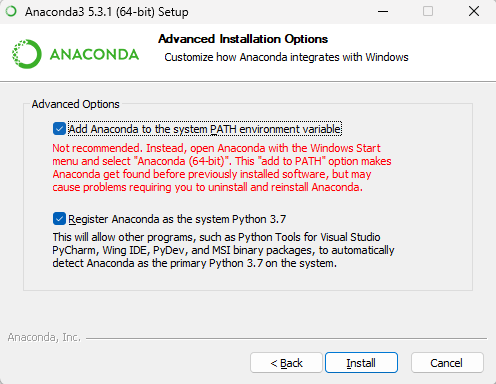
说明
- Add Anaconda to the system PATH environment variable:官方不建议将 Anaconda 添加到 PATH 环境变量中,怕会干扰其他软件,而是通过从开始菜单打开 Anaconda Navigator 或 Anaconda Prompt 来使用 Anaconda(其实是否勾选都没关系,PATH 可以自己后期更改),此处需要勾选,可以在cmd里启动conda命令。
- Register Anaconda as the system Python 3.7:除非计划安装和运行多个版本的 Anaconda 或者多个版本的 Python,否则勾选此复选框。
当显示如下图所示内容时,单击
Skip,跳过VSCode安装。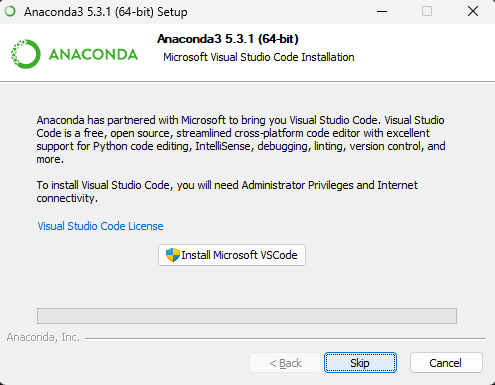
点击
Finish,完成安装。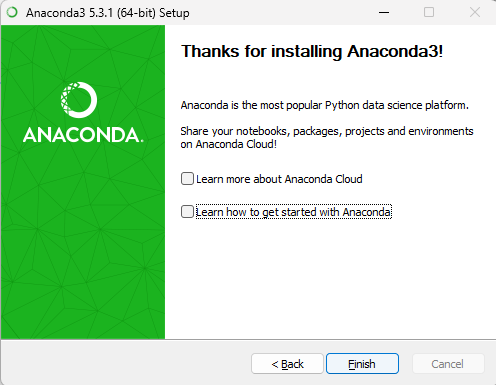
打开cmd,输入如下命令,查询安装的conda版本号。
cmdconda --version如果能查询到conda版本号,则表明anaconda安装成功,如下图所示。

四、软件包安装
创建python虚拟环境
打开cmd命令行解释器,输入如下命令,创建python3.9版本的detect虚拟环境,如下图所示。
cmdconda create -n detect python=3.9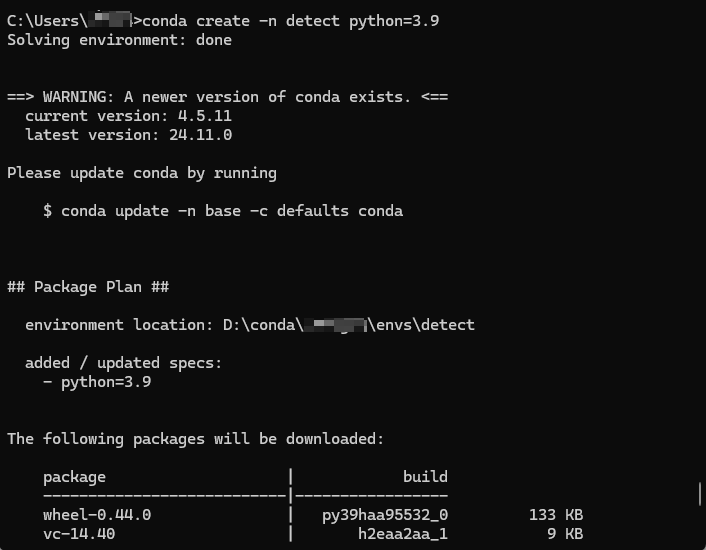
创建过程中如果存在
([y]/n)?,请输入y继续安装。安装完成之后,执行如下命令。
cmdconda env list可查看虚拟环境detect是否创建成功,如下图所示。
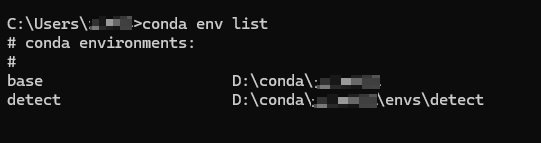
上图表明虚拟环境创建成功。
安装环境所需软件包
执行以下命令,激活虚拟环境detect。
cmdconda activate detect执行以下命令,安装所需软件包。
cmdpip install pyrealsense2==2.55.1.6486 pip install opencv-python==4.10.0.84 pip install numpy==2.0.2 pip install PyYAML==6.0.2 pip install ultralytics==8.3.38 pip install tqdm==4.67.1 pip install pillow==11.0.0 pip install scikit-learn==1.5.2 -i https://pypi.mirrors.ustc.edu.cn/simple/或执行以下脚本安装所需软件包。
cmdpip install -r requirements.txt其中,requirements.txt为相关下载章节中下载的文本文件。
五、数据采集
采集代码
注意
采集代码运行时,需要使用拓展坞连接D435相机和电脑,防止采集过程中因为线路传输问题导致程序中断。
data_collect.py为相关下载章节中下载的脚本文件。
脚本文件代码示例如下:
"""
采集图片数据用来训练yolov8
"""
import pyrealsense2 as rs
import cv2
import os
import time
import numpy as np
import re
# 创建保存图像的文件夹
color_output_folder = 'images\images'
os.makedirs(color_output_folder, exist_ok=True)
# 获取当前文件夹中已有图片的最大序号
existing_images = [f for f in os.listdir(color_output_folder) if f.lower().endswith('.png')]
max_number = 0
pattern = re.compile(r'^(\d+)\.png$')
for img_name in existing_images:
match = pattern.match(img_name)
if match:
number = int(match.group(1))
if number > max_number:
max_number = number
start_index = max_number # 下一个图片序号从max_number开始+1
# 相机配置
pipeline = rs.pipeline()
config = rs.config()
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
profile = pipeline.start(config)
# 创建对齐对象
align_to = rs.stream.color
align = rs.align(align_to)
print('<<<<<<<<<<<<<<<<<<<<<<<<<<<<< Start Detectionqq >>>>>>>>>>>>>>>>>>>>>>>>>>>>')
start_time = time.time()
frame_count = 0
while True:
frames = pipeline.wait_for_frames()
aligned_frames = align.process(frames)
aligned_depth_frame = aligned_frames.get_depth_frame()
color_frame = aligned_frames.get_color_frame()
depth_image = np.asanyarray(aligned_depth_frame.get_data())
color_image = np.asanyarray(color_frame.get_data())
# 生成文件名
frame_number = start_index + frame_count + 1
filename = f'{frame_number:04d}.png'
color_file_path = os.path.join(color_output_folder, filename)
cv2.imshow('Color Image', color_image)
c = cv2.waitKey(1) & 0xFF
if c == ord('s'):
cv2.imwrite(color_file_path, color_image)
frame_count += 1
print(f'frame_count:{frame_count}')
elif c == ord('q'):
break
# 关闭窗口并停止相机
cv2.destroyAllWindows()
pipeline.stop()
print(f'Total frames captured: {frame_count}')采集注意事项
采集图像需要注意以下几方面:
- 采集图片数量:确保每个类别有500+张图片,如果类别特别复杂或目标变化较大,建议增加至 1000 张或更多。
- 采集场景:针对模型实际使用的场景。
- 在不同的场景、背景和环境下采集数据。
- 从不同的角度和距离采集目标对象的图像。
- 在不同的光照条件下采集数据。
采集步骤
- 在python环境中运行采集图像脚本程序data_collect.py,此时弹出摄像头取景弹框。
- 请将相机对准物体,并将鼠标放置在取景弹框上,点击键盘上的
S键盘采集当前图片,按需采集一定数量的图片。 - 图片采集完毕后,点击键盘上的
Q键结束采集。
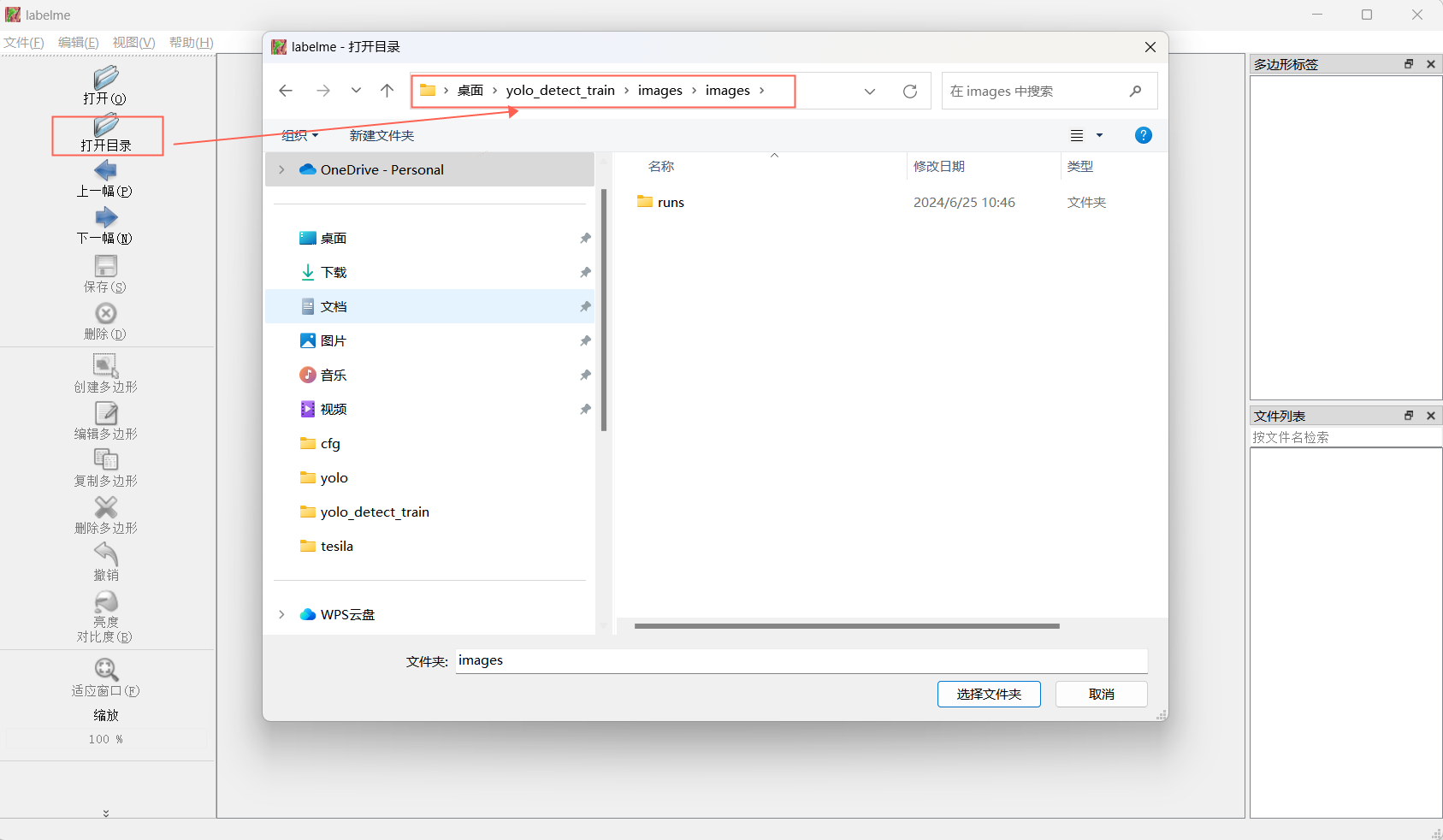
六、labelme标注图像
- 点击
Labelme.exe软件打开界面,点击打开目录选择之前保存采集图片的文件夹。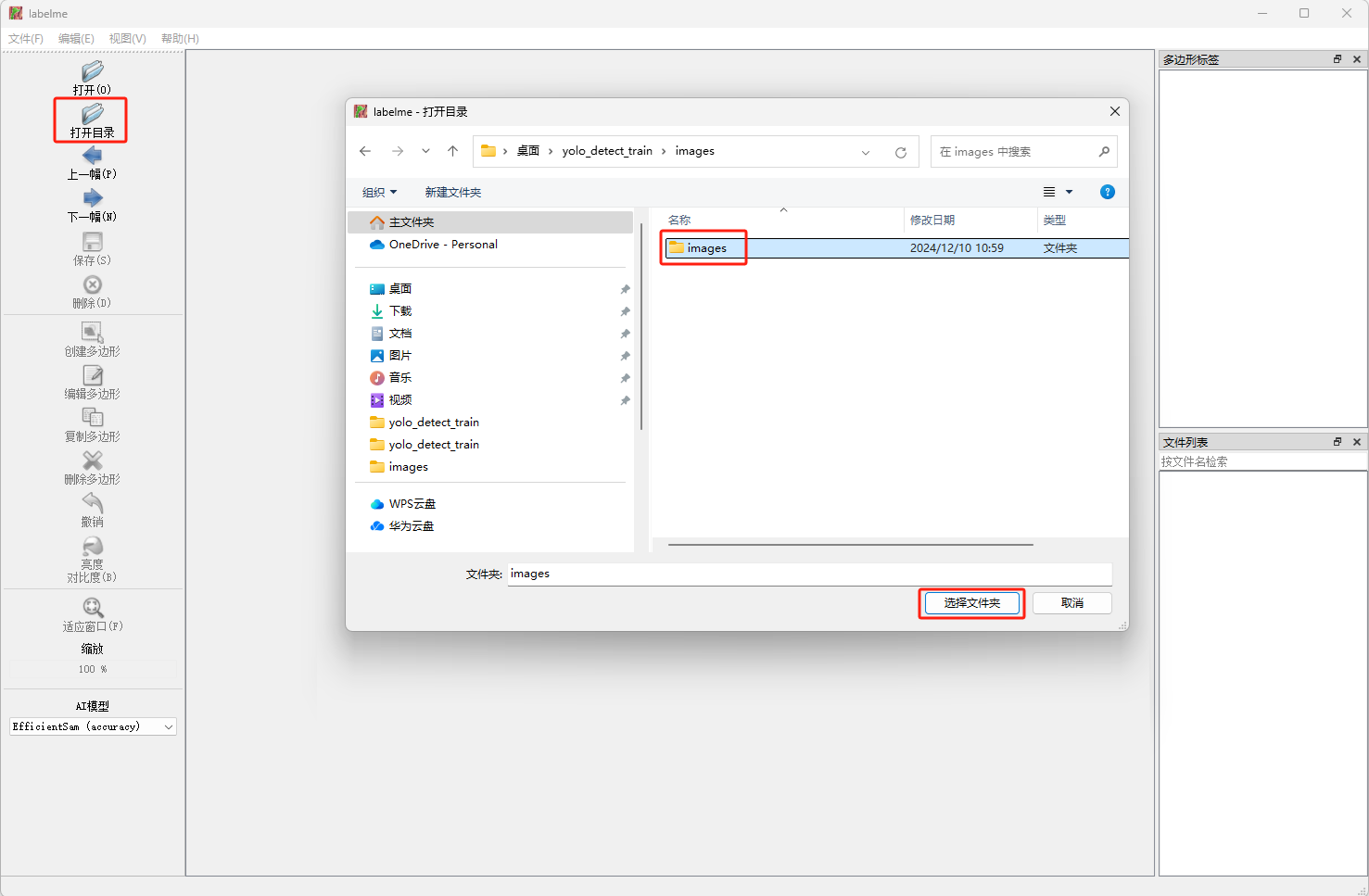
- 点击
文件>自动保存,设置标注图像后自动保存标注文件。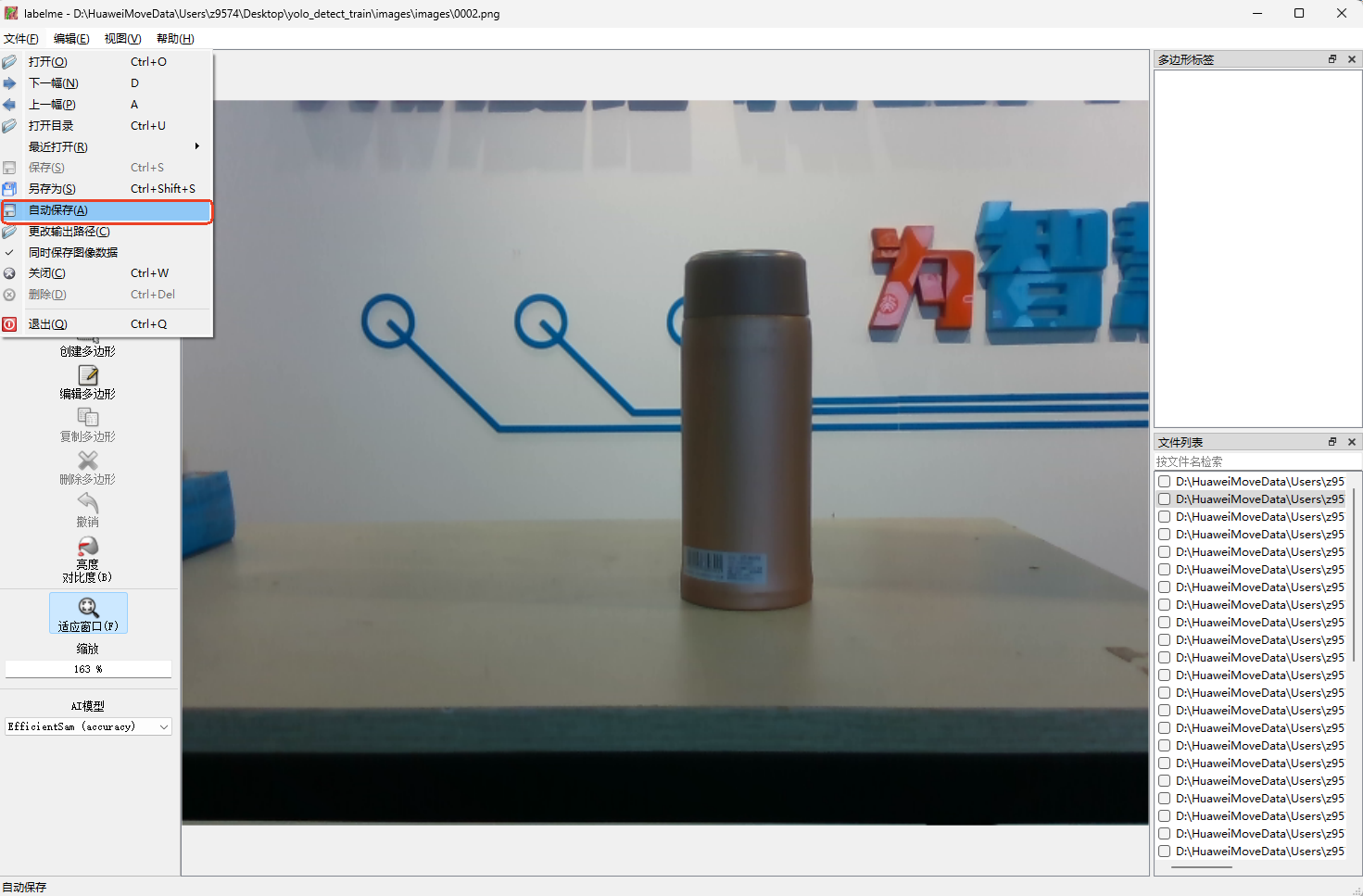
- 在标注第一幅图片的时候,在图片上点击右键,并在右键菜单中选择
创建矩形。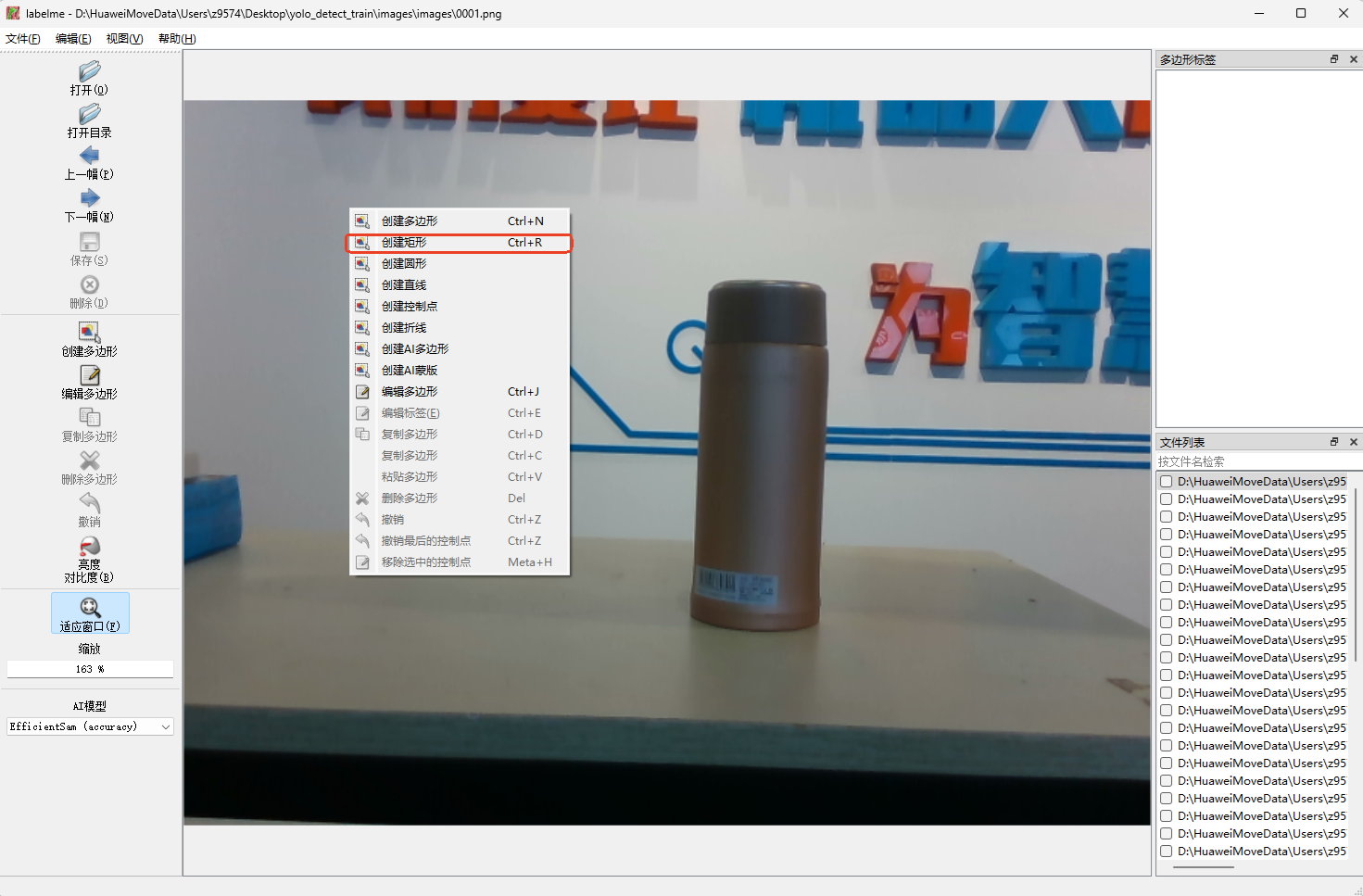
- 用矩形框住物体后,点击鼠标左键自定义物体标签。
边界框应该尽可能精确地框住目标对象,避免过度紧密或过于宽泛。对于小目标,特别要注意精确度。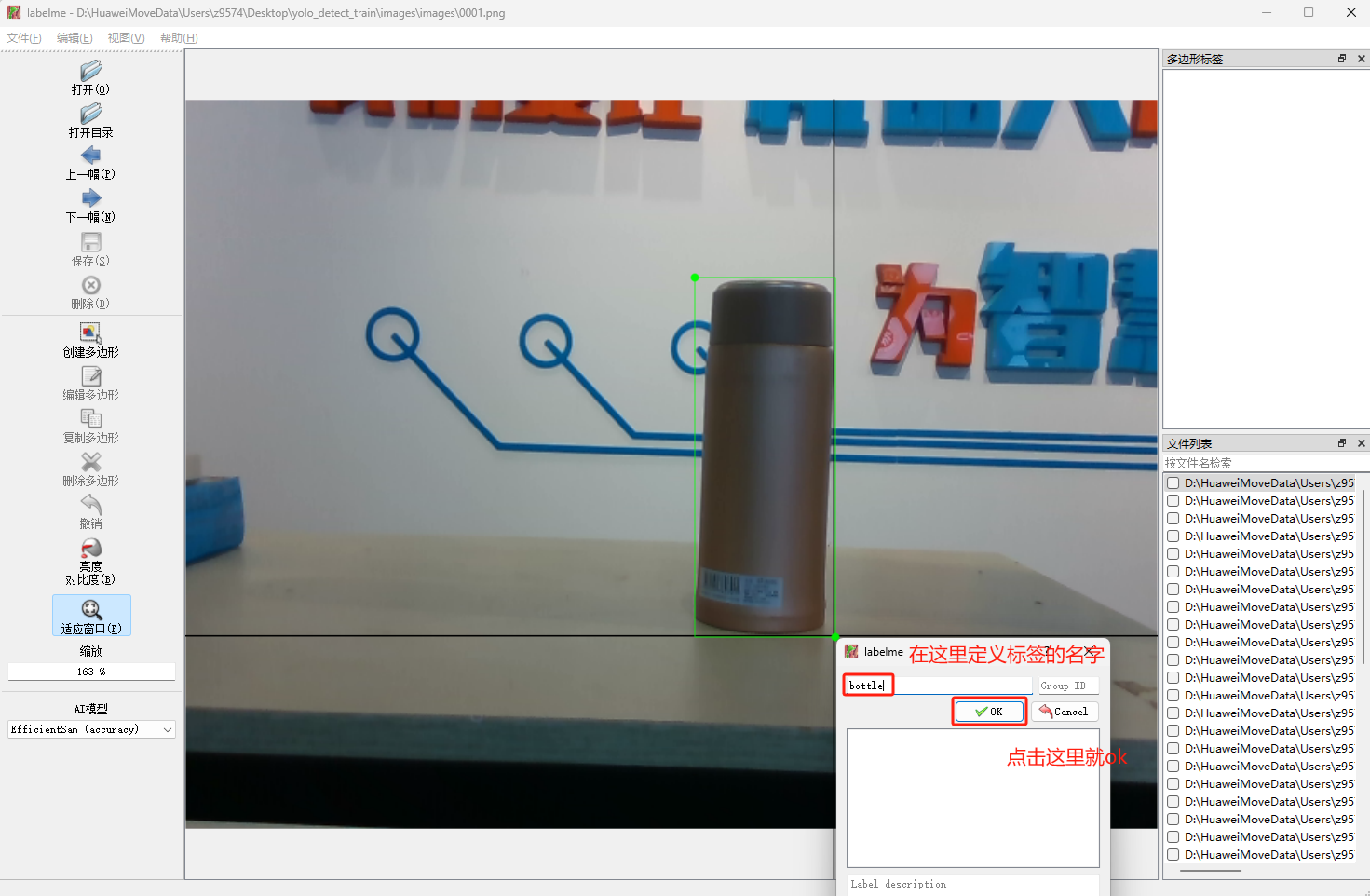
- 点击
下一幅,进行下一幅图片标注。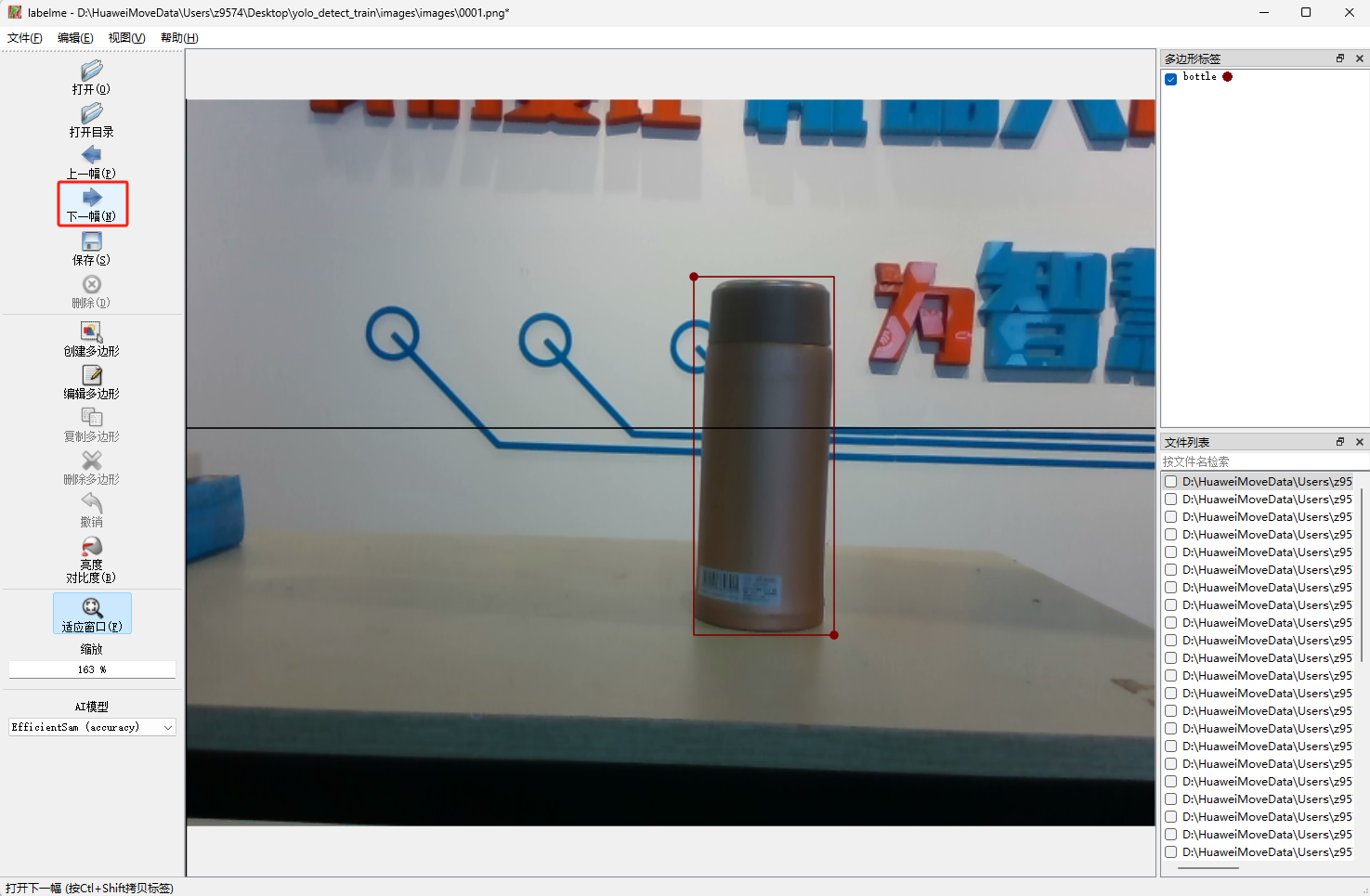
- 标注一张图片之后,会在图片同路径下生成同名的json文件,在所有采集的图片中,每个类别选择100-300张图片进行标注(确保覆盖所有类别)。 json里面是标注对象的坐标、标签等详细信息。 json文件格式如下:
{
"version": "5.5.0",
"flags": {},
"shapes": [
{
"label": "bottle",
"points": [
[
224.51612903225805,
142.25806451612902
],
[
316.1290322580645,
399.0322580645161
]
],
"group_id": null,
"description": "",
"shape_type": "rectangle",
"flags": {},
"mask": null
}
],
"imagePath": "0002.png",
"imageData": "iVBORw0KGgoAAAANSUhEUgAAAoAAAAHgCAIAAAC6s0uzAAEAAElEQVR4nLT9S7MtSZYehn3f8oh9zn1kVlZmvbIeXZ1dEIAWSQEDkpIoETCOZISZZjCTmQb6E/wtmmoiDWgmmUw0mWEoARLABggDCHQ3WO",
"imageHeight": 480,
"imageWidth": 640
}说明
- shapes:其中包含了标注的具体信息,由列表组成,每一个元素是一个字典,一个字典包含了一个标注框的相关信息,如label是自定义的标签,points是标注的点,points的取值与shape_type相关,这里取的是rectangle即直接由矩形的对角线上两点确定一个矩形框。因此points中也只有两个点的信息(检测框左上角和右下角的点坐标),点的坐标为(x,y) ,坐标轴原点在图像左上角,原点向下为y正向,向右为x正向。
- imagePath:是标注图片的文件名。
- shape_type:记录了标注时选择的方式。
我们可以用已标注的图片训练一个模型,用模型对剩余未标注的图片进行自动标注,然后用所有的图片和标注训练一个最终的模型。 此方法可以减少手动标注工作量,当后续遇到一张采集图片里有多个待标注物的情况时,全部手动标注图片的工作量极大,效率极低。
例如: 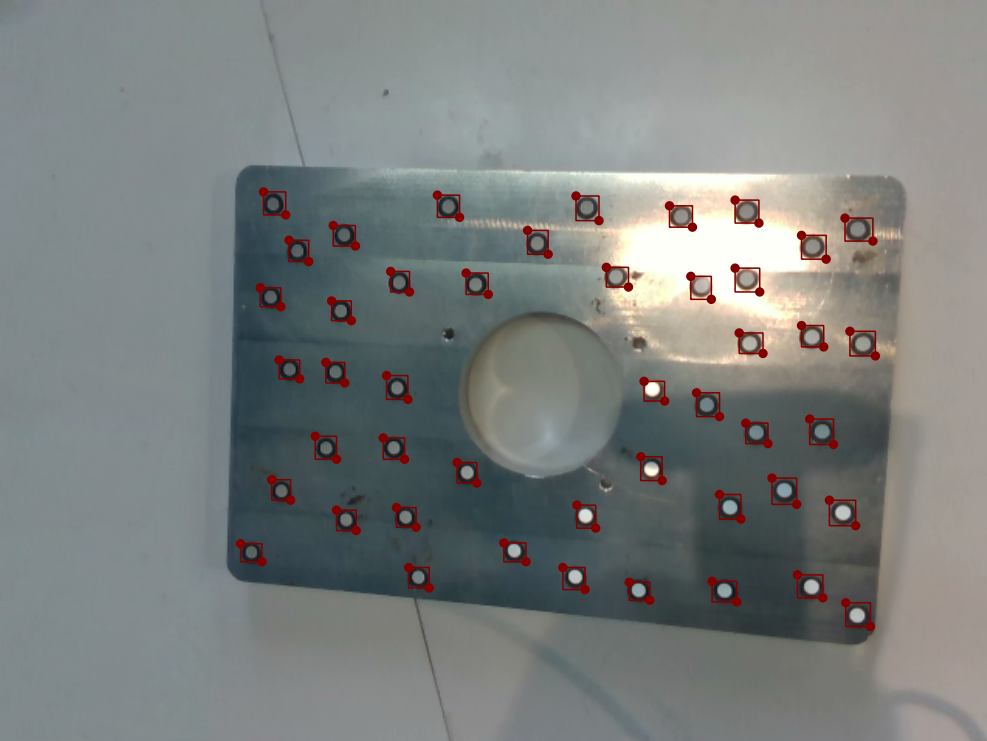
七、检测模型训练(初步训练)
剪切文件
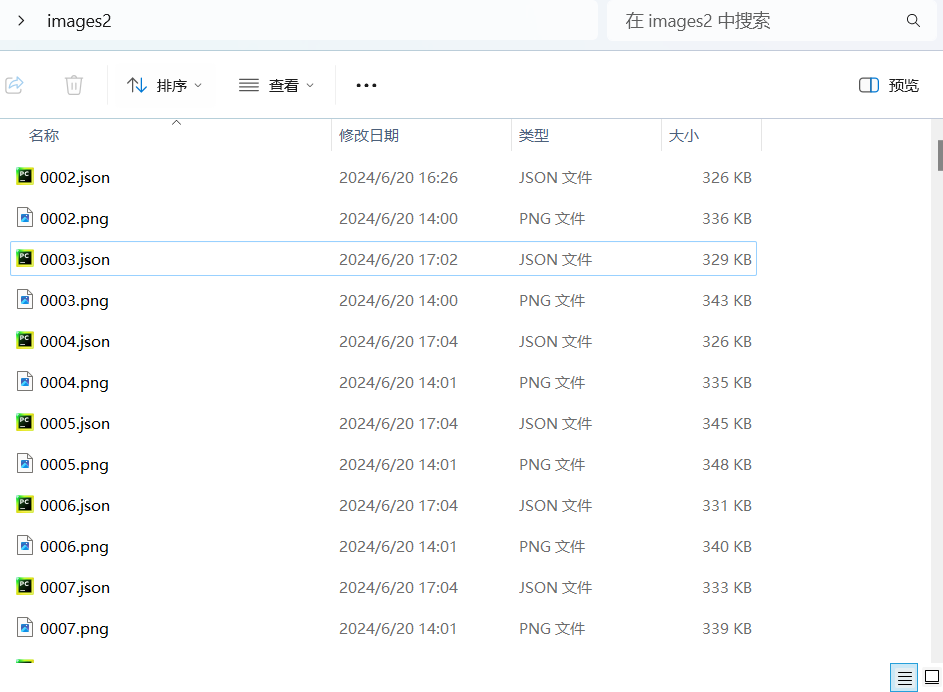
将已完成标注的图片以及标注文件剪切到新建的文件夹images2中,注意标注生成的文件是json文件,如下图所示。
YOLO模型
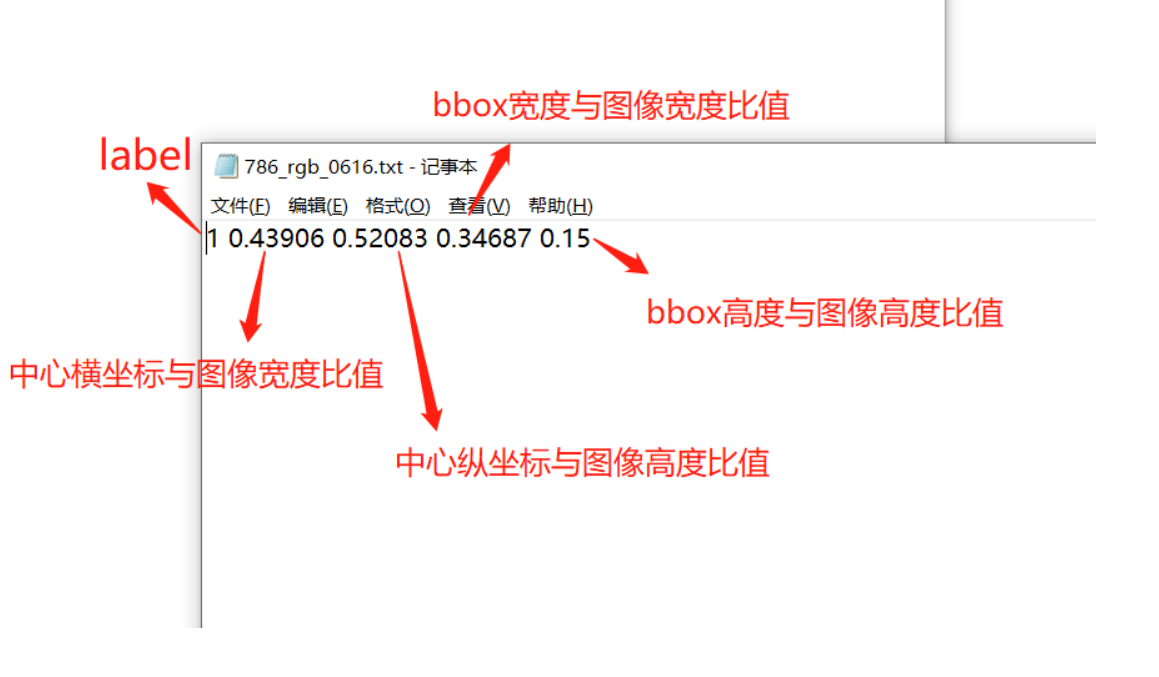
YOLO模型使用的是基于TXT文件的标注格式,每个TXT文件包含了与图片中目标相对应的信息,包括目标类别和在图片中的位置。YOLO标注文件的格式如下:
<class> <x_center> <y_center> <width> <height>说明:
<class>表示目标类别的索引(从0开始)。<x_center>,<y_center>分别表示目标框的中心点相对于图片左上角(坐标原点)的横纵坐标比例值,取值范围为0,10,1。例如,如果图片宽度为640像素,高度为480像素,那么一个中心点在水平方向上占据了图片宽度的1/4,在垂直方向上占据了图片高度的1/3,则<x_center>为0.25,<y_center>为0.33。<width>,<height>分别表示目标框宽度和高度相对于整个图片宽度和高度的比例值,同样取值范围为0,10,1。例如,如果目标框宽度占据了图片宽度的1/2,高度占据了图片高度的1/4,则<width>为0.5,<height>为0.25。
转化格式
将labelme生成的标注文件(json格式)转化成YOLO需要的标注文件(txt格式),并按照训练要求划分训练集、验证集以及测试集。
使用如下脚本实现labelme标注文件(json格式)到 YOLO标注文件(txt格式)以及转化和划分数据集的功能。
final.py为相关下载章节中下载的脚本文件。
脚本文件代码示例如下:
# -*- coding: utf-8 -*-
import os
import numpy as np
import json
from glob import glob
import cv2
import shutil
import yaml
from sklearn.model_selection import train_test_split
from tqdm import tqdm
from PIL import Image
'''
统一图像格式
'''
def change_image_format(label_path, suffix='.png'):
"""
统一当前文件夹下所有图像的格式,如'.jpg'
:param suffix: 图像文件后缀
:param label_path:当前文件路径
:return:
"""
externs = ['png', 'jpg', 'JPEG', 'BMP', 'bmp']
files = list()
# 获取尾缀在ecterns中的所有图像
for extern in externs:
files.extend(glob(label_path + "\\*." + extern))
# 遍历所有图像,转换图像格式
for index,file in enumerate(tqdm(files)):
name = ''.join(file.split('.')[:-1])
file_suffix = file.split('.')[-1]
if file_suffix != suffix.split('.')[-1]:
# 重命名为jpg
new_name = name + suffix
# 读取图像
image = Image.open(file)
image = cv2.cvtColor(np.asarray(image), cv2.COLOR_RGB2BGR)
# 重新存图为jpg格式
cv2.imwrite(new_name, image)
# 删除旧图像
os.remove(file)
'''
读取所有json文件,获取所有的类别
'''
def get_all_class(file_list, label_path):
"""
从json文件中获取当前数据的所有类别
:param file_list:当前路径下的所有文件名
:param label_path:当前文件路径
:return:
"""
# 初始化类别列表
classes = list()
# 遍历所有json,读取shape中的label值内容,添加到classes
for filename in tqdm(file_list):
json_path = os.path.join(label_path, filename + '.json')
json_file = json.load(open(json_path, "r", encoding="utf-8"))
for item in json_file["shapes"]:
label_class = item['label']
if label_class not in classes:
classes.append(label_class)
print('read file done')
return classes
'''
划分训练集、验证集、测试集
'''
def split_dataset(label_path, test_size=0.3, isUseTest=False, useNumpyShuffle=False):
"""
将文件分为训练集,测试集和验证集
:param useNumpyShuffle: 使用numpy方法分割数据集
:param test_size: 分割测试集或验证集的比例
:param isUseTest: 是否使用测试集,默认为False
:param label_path:当前文件路径
:return:
"""
# 获取所有json
files = glob(label_path + "\\*.json")
#获取所有json文件的名字
files = [i.replace("\\", "/").split("/")[-1].split(".json")[0] for i in files]
if useNumpyShuffle:
file_length = len(files)
index = np.arange(file_length)
np.random.seed(32)
np.random.shuffle(index) # 随机划分
test_files = None
# 是否有测试集
if isUseTest:
trainval_files, test_files = np.array(files)[index[:int(file_length * (1 - test_size))]], np.array(files)[
index[int(file_length * (1 - test_size)):]]
else:
trainval_files = files
# 划分训练集和测试集
train_files, val_files = np.array(trainval_files)[index[:int(len(trainval_files) * (1 - test_size))]], \
np.array(trainval_files)[index[int(len(trainval_files) * (1 - test_size)):]]
else:
test_files = None
if isUseTest:
trainval_files, test_files = train_test_split(files, test_size=test_size, random_state=55)
else:
trainval_files = files
#将json文件名(不带后缀名)按照1-test_size/test_size 随机分配
train_files, val_files = train_test_split(trainval_files, test_size=test_size, random_state=55)
return train_files, val_files, test_files, files
'''
生成yolov8的训练、验证、测试集的文件夹
'''
def create_save_file(ROOT_DIR,isUseTest = False):
print('step6:生成yolov8的训练、验证、测试集的文件夹')
# 生成训练集
train_image = os.path.join(ROOT_DIR, 'images','train')
if not os.path.exists(train_image):
os.makedirs(train_image)
train_label = os.path.join(ROOT_DIR, 'labels','train')
if not os.path.exists(train_label):
os.makedirs(train_label)
# 生成验证集
val_image = os.path.join(ROOT_DIR, 'images', 'val')
if not os.path.exists(val_image):
os.makedirs(val_image)
val_label = os.path.join(ROOT_DIR, 'labels', 'val')
if not os.path.exists(val_label):
os.makedirs(val_label)
# 生成测试集
if isUseTest:
test_image = os.path.join(ROOT_DIR, 'images', 'test')
if not os.path.exists(test_image):
os.makedirs(test_image)
test_label = os.path.join(ROOT_DIR, 'labels', 'test')
if not os.path.exists(test_label):
os.makedirs(test_label)
else:
test_image, test_label = None,None
return train_image, train_label, val_image, val_label, test_image, test_label
'''
转换,根据图像大小,返回box框的中点和高宽信息
'''
def convert(img_size, box):
dw = 1. / (img_size[0])
dh = 1. / (img_size[1])
x = (box[0] + box[2]) / 2.0 - 1
y = (box[1] + box[3]) / 2.0 - 1
w = box[2] - box[0]
h = box[3] - box[1]
x = x * dw
w = w * dw
y = y * dh
h = h * dh
return (x, y, w, h)
'''
移动图像和标注文件到指定的训练集、验证集和测试集中
'''
def push_into_file(file, images, labels, ROOT_DIR, suffix='.jpg'):
"""
最终生成在当前文件夹下的所有文件按image和label分别存在到训练集/验证集/测试集路径的文件夹下
:param file: 文件名列表
:param images: 存放images的路径
:param labels: 存放labels的路径
:param label_path: 当前文件路径
:param suffix: 图像文件后缀
:return:
"""
# 遍历所有文件
for filename in tqdm(file):
# 图像文件
image_file = os.path.join(ROOT_DIR, filename + suffix)
# 标注文件
label_file = os.path.join(ROOT_DIR, filename + '.txt')
# yolov8存放图像文件夹
if not os.path.exists(os.path.join(images, filename + suffix)):
try:
shutil.copy(image_file, images)
except OSError:
pass
# yolov8存放标注文件夹
if not os.path.exists(os.path.join(labels, filename + suffix)):
try:
shutil.move(label_file, labels)
except OSError:
pass
def json2txt(classes, ROOT_DIR=""):
"""
将json文件转化为txt文件
:param classes: 类别名
:param label_path:当前文件路径
:return:
"""
#file里面是所有json文件名
_, _, _, files = split_dataset(ROOT_DIR)
for json_file_ in tqdm(files):
# json路径
json_filename = os.path.join(ROOT_DIR, json_file_ + ".json")
# 转换后txt标签文件夹路径
out_file = open('%s/%s.txt' % (ROOT_DIR, json_file_), 'w')
# 加载标签json文件
json_file = json.load(open(json_filename, "r", encoding="utf-8"))
img_w = json_file['imageWidth']
img_h = json_file['imageHeight']
'''
核心:标签转换(json转txt)
'''
for multi in json_file["shapes"]:
if (multi['shape_type'] == 'rectangle'):
x1 = int(multi['points'][0][0])
y1 = int(multi['points'][0][1])
x2 = int(multi['points'][1][0])
y2 = int(multi['points'][1][1])
label = multi["label"]
cls_id = classes.index(label)
bb = (x1, y1, x2, y2)
bb = convert((img_w, img_h), bb)
out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')
'''
创建yaml文件
'''
def create_yaml(classes, ROOT_DIR, isUseTest=False,dataYamlName=""):
print('step5:创建yolov8训练所需的yaml文件')
classes_dict = {}
for index, item in enumerate(classes):
classes_dict[index] = item
ROOT_DIR = os.path.abspath(ROOT_DIR)
if not isUseTest:
desired_caps = {
'path': ROOT_DIR,
'train': 'images/train',
'val': 'images/val',
'names': classes_dict
}
else:
desired_caps = {
'path': ROOT_DIR,
'train': 'images/train',
'val': 'images/val',
'test': 'images/test',
'names': classes_dict
}
yamlpath = os.path.join(ROOT_DIR, dataYamlName + ".yaml")
# 写入到yaml文件
with open(yamlpath, "w+", encoding="utf-8") as f:
for key, val in desired_caps.items():
yaml.dump({key: val}, f, default_flow_style=False)
# 首先确保当前文件夹下的所有图片统一后缀,如.jpg,如果为其他后缀,将suffix改为对应的后缀,如.png
def ChangeToYoloDet(ROOT_DIR="", suffix='.bmp',classes="", test_size=0.1, isUseTest=False,useNumpyShuffle=False,auto_genClasses = False,dataYamlName=""):
"""
生成最终标准格式的文件
:param test_size: 分割测试集或验证集的比例
:param label_path:当前文件路径
:param suffix: 文件后缀名
:param isUseTest: 是否使用测试集
:return:
"""
# step1:统一图像格式
change_image_format(ROOT_DIR,suffix)
# step2:根据json文件划分训练集、验证集、测试集
train_files, val_files, test_file, files = split_dataset(ROOT_DIR, test_size=test_size, isUseTest=isUseTest)
# step3:根据json文件,获取所有类别
classes = classes
# 是否自动从数据集中获取类别数
if auto_genClasses:
classes = get_all_class(files, ROOT_DIR)
'''
step4:(***核心***)将json文件转化为txt文件,并将json文件存放到指定文件夹
'''
json2txt(classes, ROOT_DIR=ROOT_DIR)
# step5:创建yolov8训练所需的yaml文件
create_yaml(classes, ROOT_DIR, isUseTest=isUseTest,dataYamlName=dataYamlName)
# step6:生成yolov8的训练、验证、测试集的文件夹
train_image_dir, train_label_dir, val_image_dir, val_label_dir, test_image_dir, test_label_dir = create_save_file(ROOT_DIR,isUseTest)
# step7:将所有图像和标注文件,移动到对应的训练集、验证集、测试集
# 将文件移动到训练集文件中
push_into_file(train_files, train_image_dir, train_label_dir,ROOT_DIR=ROOT_DIR, suffix=suffix)
# 将文件移动到验证集文件夹中
push_into_file(val_files, val_image_dir, val_label_dir,ROOT_DIR=ROOT_DIR, suffix=suffix)
# 如果测试集存在,则将文件移动到测试集文件中
if test_file is not None:
push_into_file(test_file, test_image_dir, test_label_dir, ROOT_DIR=ROOT_DIR, suffix=suffix)
print('create dataset done')
if __name__ == "__main__":
'''
1.ROOT_DIR:图像和json标签的路径
2.suffix:统一图像尾缀
3.classes=['dog', 'cat'], # 输入你标注的列表里的名称(注意区分大小写),用于自定义类别名称和id对应
4.test_size:测试集和验证集所占比例
5.isUseTest:是否启用测试集
6.useNumpyShuffle:是否随机打乱
7.auto_genClasses:是否自动根据json标签生成类别列表
8.dataYamlName:数据集yaml文件名称
'''
ChangeToYoloDet(
ROOT_DIR = r'D:\HuaweiMoveData\Users\z9574\Desktop\yolo_detect_train\images2', # 注意数据集路径尽量不要含中文
suffix='.png', # 确定图像尾缀,用于统一图像尾缀
classes=[], # 输入你标注的列表里的名称(注意区分大小写)
test_size=0.3, # 如果设置测试集,这是测试集占总的数据集的比例,否则,这是验证集占总的数据集的比例
isUseTest=False, # 是否启用测试集
useNumpyShuffle=False, # 是否乱序
auto_genClasses = True, # 是否根据数据集自动生成类别id
dataYamlName= "bottle_data" # 数据集yaml文件名称
)以上程序的主函数是ChangeToYoloDet,仅需设置如下参数:
| 参数 | 参数含义 |
|---|---|
| ROOT_DIR | 图片以及labelme生成的标注文件(json文件)所在路径,绝对路径 (当前路径不能有中文名字, 否则生成yaml文件内容有时会出错) |
| test_size | 如果设置测试集,这是测试集占总的数据集的比例,否则,这是验证集占总的数据集的比例 |
| isUseTest | 是否要测试集(如果False 则只划分出训练集和验证集) |
| dataYamlName | yolo训练的时候yaml文件名字,后面训练的时候用的到 |
执行如上脚本,可实现在ROOT_DIR路径下生成如下文件目录。 
其中,图片和标注文件已经按照脚本设置的比例分成训练集和验证集。
同时,在ROOT_DIR路径下,还生成了一个yaml文件,yaml文件名字由脚本文件中的dataYamlName参数指定,后续模型检测训练需要使用此文件。
模型训练,得到初步的检测模型
- 执行以下命令,激活虚拟环境detect。
conda activate detect- 执行yolov8训练命令。
yolo detect train data=images2/bottle_data.yaml model=yolov8n.pt epochs=300 batch=16参数说明如下:
| 参数 | 填入值 | 定义 |
|---|---|---|
| data | images2/bottle_data.yaml | 数据集配置文件的路径(例如,coco8.yaml)。该文件包含特定于数据集的参数,包括到训练和验证数据的路径、类名和类数。这个是上面用脚本生成的 |
| model | yolov8n.pt | 指定用于训练的模型文件(会自动下载,需要有网络) |
| epochs | 300 | Total number of training epochs. 训练周期总数。每个epoch代表整个数据集的完整传递。调整这个值会影响训练时间和模型性能。 |
| batch | 16 | 批量大小 |
| patience | 100(默认值) | 如果epochs到patience轮后验证指标没有改善情况,训练提前停止 |
当训练结束后,会生成一个runs文件夹,训练完成的模型存放在runs文件中的detect\train\weights文件夹中。
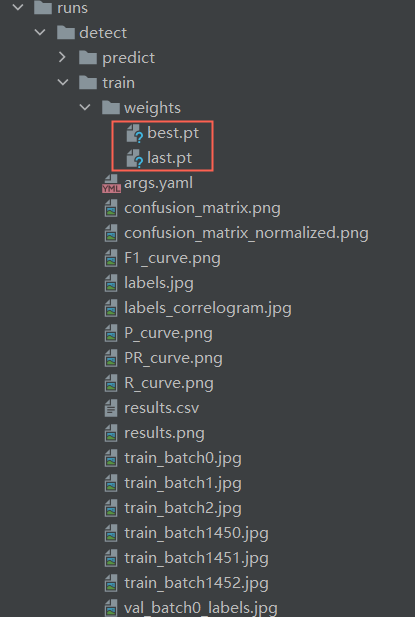
图中,best.pt和last.pt均为YOLO模型的训练权重文件,区别在于:
best.pt:保存的是训练过程中在验证集上表现最好的模型权重。在训练过程中,每个epoch结束后都会对验证集进行一次评估,并记录下表现最好的模型的权重。这个文件通常用于推理和部署阶段,因为它包含了在验证集上表现最好的模型的权重,可以获得最佳的性能。last.pt:保存的是最后一次训练迭代结束后的模型权重。这个文件通常用于继续训练模型,因为它包含了最后一次训练迭代结束时的模型权重,可以继续从上一次训练结束的地方继续训练模型。 使用上的区别是,当需要在之前的训练基础上继续训练时,应该使用last.pt作为起点进行训练;当需要使用训练后的模型进行推理和部署时 ,应该使用best.pt。
八、自动标注
使用初步的检测模型生成labels
执行如下命令,检测待自动标注的数据集:
yolo predict model=runs\detect\train\weights\best.pt source=images\images save_txt=True参数说明如下:
| 参数 | 填入值 | 含义 |
|---|---|---|
| model | runs\detect\train\weights\best.pt | 用于检测的权重(初步训练得到的权重,上一步训练得到的模型) |
| source | images\images | 指定用于推断的数据源。可以是图像路径、视频文件、目录、URL或实时feed的设备ID。支持多种格式和源。 |
| save_txt | True | 将检测结果保存在文本文件中 |
命令输出检测图片和检测文件的结果如下图所示:


- 输出图片:
- YOLO会将原始输入图片中检测到的对象用边界框(bounding boxes)标记出来,并保存带有标注的新图片。每张检测到对象的图片上都会有一个或多个边界框,每个框 surrounds 一个检测到的对象实例。
- 图片保存在当前路径下的runs\detect\predict目录下。
- 输出文本文件:
- 对于每一张处理过的图片,YOLO还会生成一个与图片同名的
.txt文件。这个文本文件包含了每个检测到的对象实例的详细信息,格式通常为:类别ID、置信度、边界框坐标(左上角x, y坐标和宽高w, h)。例如:0 0.8765 0.4567 0.3210 0.2345表示模型检测这是一个类别ID为0(假设是'bottle'类别)的物体,置信度为87.65%,边界框位于图片中央位置且占据了一定比例的区域。 - 保存在当前路径下的runs\detect\predict\labels目录下。
此时,需要查看runs\detect\predict检测的图片,其中如果存在检测不准或有偏差的,需要对其产生的label文件进行修改。
将label下txt转成labelme使用的json文件
此步骤需要将上一步生成的文件(txt格式)转化成labelme标注软件需要的标注文件(json文件),以便后面使用labelme对标注文件进行微调。
txt2json.py为相关下载章节中下载的脚本文件。
脚本文件代码示例如下:
import os
import cv2
import json
import glob
import numpy as np
def convert_txt_to_labelme_json(txt_path, image_path, output_dir, image_fmt='.png'):
# txt 转labelme json
# 将yolo的txt转labelme json
txts = glob.glob(os.path.join(txt_path, "*.txt"))
for txt in txts:
labelme_json = {
'version': '5.5.0',
'flags': {},
'shapes': [],
'imagePath': None,
'imageData': None,
'imageHeight': None,
'imageWidth': None,
}
txt_name = os.path.basename(txt)
image_name = txt_name.split(".")[0] + image_fmt
labelme_json['imagePath'] = image_name
image_name = os.path.join(image_path, image_name)
if not os.path.exists(image_name):
raise Exception('txt 文件={},找不到对应的图像={}'.format(txt, image_name))
image = cv2.imdecode(np.fromfile(image_name, dtype=np.uint8), cv2.IMREAD_COLOR)
h, w = image.shape[:2]
labelme_json['imageHeight'] = h
labelme_json['imageWidth'] = w
with open(txt, 'r') as t:
lines = t.readlines()
for line in lines:
content = line.split(' ')
label = content[0]
object_width = float(content[3])
object_height = float(content[4])
top_left_x = (float(content[1]) - object_width / 2) * w
top_left_y = (float(content[2]) - object_height / 2) * h
bottom_right_x = (float(content[1]) + object_width / 2) * w
bottom_right_y = (float(content[2]) + object_height / 2) * h
try:
shape = {
'label': dict_.get(int(label)),
'score': float(content[5]),
'group_id': None,
'shape_type': 'rectangle',
'flags': {},
'points': [
[float(top_left_x), float(top_left_y)],
[float(bottom_right_x), float(bottom_right_y)]
]
}
except Exception as e:
# print(e)
shape = {
'label': dict_.get(int(label)),
'score': float(0.99),
'group_id': None,
'shape_type': 'rectangle',
'flags': {},
'points': [
[float(top_left_x), float(top_left_y)],
[float(bottom_right_x), float(bottom_right_y)]
]
}
labelme_json['shapes'].append(shape)
json_name = txt_name.split('.')[0] + '.json'
json_name_path = os.path.join(output_dir, json_name)
fd = open(json_name_path, 'w')
json.dump(labelme_json, fd, indent=4)
fd.close()
print("save json={}".format(json_name_path))
if __name__ == "__main__":
dict_ = {0: "bottle"}
in_imgs_dir = r'images\images'
in_label_txt_dir = r'runs\detect\predict\labels'
out_labelme_json_dir = in_imgs_dir
if not os.path.exists(out_labelme_json_dir):
os.mkdir(out_labelme_json_dir)
convert_txt_to_labelme_json(in_label_txt_dir, in_imgs_dir, out_labelme_json_dir, image_fmt='.png')请根据如下描述,修改如上脚本中的以下参数。
| 参数 | 填入值 | 含义 |
|---|---|---|
| dict_ | 标注时的类别名和id | 标注时的类别名和id(要改为你标注图片时自定义的标签名和id) |
| in_imgs_dir | images\images | 需要微调的图片所在路径 |
| in_label_txt_dir | runs\detect\predict\labels | 上一步模型检测labels文件保存路径 |
| out_labelme_json_dir | in_imgs_dir | 将txt转化生成的json的放置路径(设置为图片路径,和图片保存在一起) |
说明
其中,in_imgs_dir为生成图片对应json文件(labelme需要)的存放路径。
微调labels
使用labelme标注工具加载生成的标注文件和对应的图片,并对模型检测的labels进行微调。
用labelme微调的目的是:
- 修正错误标注:初步检测模型生成的labels可能包含错误或者不准确的标注,通过微调可以修正这些错误。
- 提高标注质量:自动生成的labels质量可能不如手动的高,通过微调可以提升标注精度。
九、重新训练
将images2中的所有文件(图片和json文件)和images/images所有文件(图片和json文件)放置在一个新的文件夹images3中,执行转化格式和模型训练,得到初步的检测模型步骤开始训练模型。
模型训练结束,最后生成的模型文件存放在weights文件夹中。
十、使用模型
用拓展坞连接相机和电脑,将best.pt和检测脚本yolov8.py放在同一路径下,将D435相机镜头对准待检测的物体,使用best.pt模型进行检测。
yolov8.py为相关下载章节中下载的脚本文件。
脚本文件代码示例如下:
import cv2
import pyrealsense2 as rs
import time
import numpy as np
import math
from ultralytics import YOLO
# 加载 YOLOv8 模型
model = YOLO("best.pt")
# # 获取摄像头内容,参数 0 表示使用默认的摄像头
# cap = cv2.VideoCapture(1)
# 配置 RealSense
pipeline = rs.pipeline()
config = rs.config()
config.enable_stream(rs.stream.depth, 848, 480, rs.format.z16, 30)
config.enable_stream(rs.stream.color, 848, 480, rs.format.bgr8, 30)
# 启动相机流
pipeline.start(config)
align_to = rs.stream.color # 与color流对齐
align = rs.align(align_to)
def get_aligned_images():
frames = pipeline.wait_for_frames() # 等待获取图像帧
aligned_frames = align.process(frames) # 获取对齐帧
aligned_depth_frame = aligned_frames.get_depth_frame() # 获取对齐帧中的depth帧
color_frame = aligned_frames.get_color_frame() # 获取对齐帧中的color帧
# 相机参数的获取
intr = color_frame.profile.as_video_stream_profile().intrinsics # 获取相机内参
depth_intrin = aligned_depth_frame.profile.as_video_stream_profile(
).intrinsics # 获取深度参数(像素坐标系转相机坐标系会用到)
'''camera_parameters = {'fx': intr.fx, 'fy': intr.fy,
'ppx': intr.ppx, 'ppy': intr.ppy,
'height': intr.height, 'width': intr.width,
'depth_scale': profile.get_device().first_depth_sensor().get_depth_scale()
}'''
# 保存内参到本地
# with open('./intrinsics.json', 'w') as fp:
# json.dump(camera_parameters, fp)
#######################################################
depth_image = np.asanyarray(aligned_depth_frame.get_data()) # 深度图(默认16位)
depth_image_8bit = cv2.convertScaleAbs(depth_image, alpha=0.03) # 深度图(8位)
depth_image_3d = np.dstack(
(depth_image_8bit, depth_image_8bit, depth_image_8bit)) # 3通道深度图
color_image = np.asanyarray(color_frame.get_data()) # RGB图
# 返回相机内参、深度参数、彩色图、深度图、齐帧中的depth帧
return intr, depth_intrin, color_image, depth_image, aligned_depth_frame
def get_3d_camera_coordinate(depth_pixel, aligned_depth_frame, depth_intrin):
x = depth_pixel[0]
y = depth_pixel[1]
dis = aligned_depth_frame.get_distance(x, y) # 获取该像素点对应的深度
# print ('depth: ',dis) # 深度单位是m
camera_coordinate = rs.rs2_deproject_pixel_to_point(depth_intrin, depth_pixel, dis)
# print ('camera_coordinate: ',camera_coordinate)
return dis, camera_coordinate
# 初始化 FPS 计算
fps = 0
frame_count = 0
start_time = time.time()
try:
while True:
# 等待获取一对连续的帧:深度和颜色
intr, depth_intrin, color_image, depth_image, aligned_depth_frame = get_aligned_images()
if not depth_image.any() or not color_image.any():
continue
# 获取当前时间
time1 = time.time()
# 将图像转为numpy数组
depth_colormap = cv2.applyColorMap(cv2.convertScaleAbs(
depth_image, alpha=0.03), cv2.COLORMAP_JET)
images = np.hstack((color_image, depth_colormap))
# 使用 YOLOv8 进行目标检测
results = model.predict(color_image, conf=0.5)
annotated_frame = results[0].plot()
detected_boxes = results[0].boxes.xyxy # 获取边界框坐标
# print('方框坐标', detected_boxes)
for i, box in enumerate(detected_boxes):
x1, y1, x2, y2 = map(int, box) # 获取边界框坐标
# 计算步长
xrange = max(1, math.ceil(abs((x1 - x2) / 30)))
yrange = max(1, math.ceil(abs((y1 - y2) / 30)))
# xrange = 1
# yrange = 1
point_cloud_data = []
# 获取范围内点的三维坐标
for x_position in range(x1, x2, xrange):
for y_position in range(y1, y2, yrange):
depth_pixel = [x_position, y_position]
dis, camera_coordinate = get_3d_camera_coordinate(depth_pixel, aligned_depth_frame,
depth_intrin) # 获取对应像素点的三维坐标
point_cloud_data.append(f"{camera_coordinate} ")
# 一次性写入所有数据
with open("point_cloud_data.txt", "a") as file:
file.write(f"\nTime: {time.time()}\n")
file.write(" ".join(point_cloud_data))
# 显示中心点坐标
ux = int((x1 + x2) / 2)
uy = int((y1 + y2) / 2)
dis, camera_coordinate = get_3d_camera_coordinate([ux, uy], aligned_depth_frame,
depth_intrin) # 获取对应像素点的三维坐标
formatted_camera_coordinate = f"({camera_coordinate[0]:.2f}, {camera_coordinate[1]:.2f}, {camera_coordinate[2]:.2f})"
cv2.circle(annotated_frame, (ux, uy), 4, (255, 255, 255), 5) # 标出中心点
cv2.putText(annotated_frame, formatted_camera_coordinate, (ux + 20, uy + 10), 0, 1,
[225, 255, 255], thickness=1, lineType=cv2.LINE_AA) # 标出坐标
# 计算 FPS
frame_count += 1
time2 = time.time()
fps = int(1 / (time2 - time1))
# 显示 FPS
cv2.putText(annotated_frame, f'FPS: {fps:.2f}', (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2,
cv2.LINE_AA)
# 显示结果
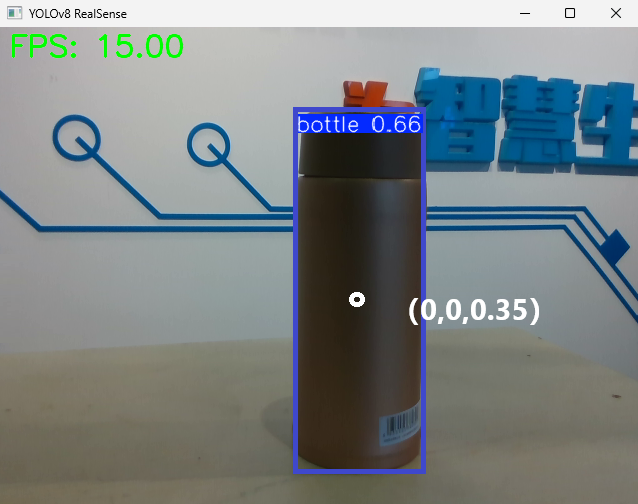
cv2.imshow('YOLOv8 RealSense', annotated_frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
finally:
# 停止流
pipeline.stop()如果训练模型正常,则会出现如下图所示的方框框住目标物体,方框正中心显示物体在相机的坐标系位置(x,y,z的单位是m),左上角显示物体的检测类别和置信率。