SDK开发指南:
任意物品分割 对画面内的任意物品分割,提取其轮廓信息。
功能价值和特性
- 可提示的分割任务: 模型在设计时考虑到了可提示的分割任务,使其能够根据任何给定的提示(如识别物体的空间或文本线索)生成有效的分割掩码。我们一般通过给定图像内像素点坐标信息做到该位置物体分割。
- 先进的架构:Segment Anything Model 采用功能强大的图像编码器、提示编码器和轻量级掩码解码器。这种独特的架构可在分割任务中实现灵活的提示、实时掩码计算和模糊感知。
- 本代码对SAM进行了封装与特异性适配,使用此功能,可不用训练,生成分割Mask,搭配姿态生成算法,可实现快速抓取任意物体。
如果想要了解更多信息,请访问:segment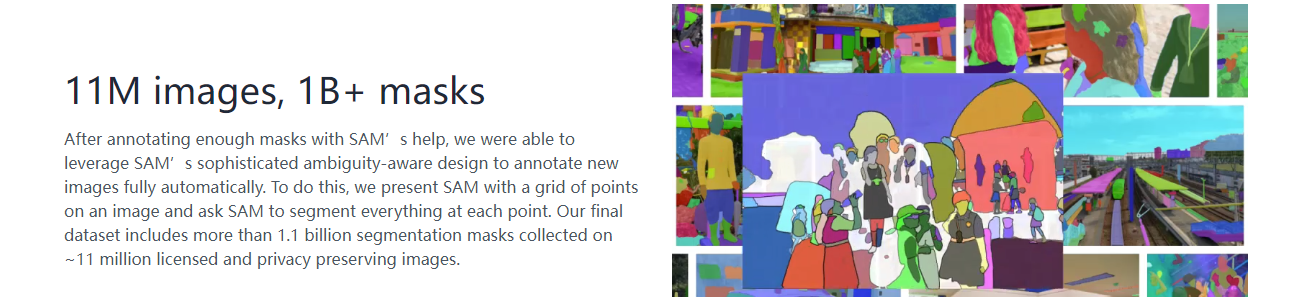
使用场景
常见使用场景包括自动标注、物体分割、提取mask等等。
1. 快速入门
基础环境准备
| 项目 | 版本 |
|---|---|
| 操作系统 | ubuntu20.04 |
| 架构 | x86 |
| 显卡驱动 | nvidia-driver-535 |
| Python | 3.8 |
| pip | 24.2 |
Python环境准备
| 包 | 版本 |
|---|---|
| cuda | 11.3 |
| cudnn | 8.0 |
| torch | 1.12.0 |
| torchvision | 0.13.0 |
| opencv-python | 4.9.0.80 |
| pyyaml | 5.4.1 |
| matplotlib | 3.7.2 |
| pandas | 1.5.3 |
| Pillow | 9.5.0 |
- 确保已经安装了基本环境
安装Nvidia驱动,详细参考安装Nvidia显卡环境
安装conda包管理工具和python对应环境,详细参考安装conda和python环境
- 构建python环境
创建conda虚拟环境
conda create --name [conda_env_name] python=3.8 -y激活虚拟环境
conda activate [conda_env_name]查看python版本
python -V查看pip版本
pip -V更新pip到最新版本
pip install -U pip- 安装python环境三方包依赖
安装pytorch的gpu版本和cuda等深度学习加速环境
conda install pytorch==1.12.0 torchvision==0.13.0 torchaudio==0.12.0 cudatoolkit=11.3 -c pytorch -y如果conda安装失败或时间过长 换成下面代码
pip install torch==1.12.0+cu113 torchvision==0.13.0+cu113 torchaudio==0.12.0 --extra-index-url https://download.pytorch.org/whl/cu113 -i https://pypi.tuna.tsinghua.edu.cn/simple安装opencv
pip install opencv-python==4.10.0.84安装pyyaml
pip install pyyaml==5.4.1安装matplotlib
pip install matplotlib==3.7.5安装pandas
pip install pandas==1.5.3安装pillow
pip install Pillow==10.4.0安装scipy
pip install scipy==1.10.1安装ultralytics
pip install ultralytics==8.2.66资源准备
下载完成训练的sam模型权重权重:sam.pt
代码获取
代码可以在GitHub: 任意物品分割获取最新代码。
快速开始示例
from rm_sam.interface import DetectBase
# 实例化分割对象
sam_seg = DetectBase()
# 加载对应模型
predictor = sam_seg.gen_model()
# 以opencv方式读取图片,此时图片是RGB模式
color_image = cv2.imread("xxx.png")
# 预处理图片
color_frame = sam_seg.forward_handle_input(color_image)
# 执行推理
results = sam_seg.detect(color_frame, predictor=predictor, point=TARGET_POINT, bboxes=None)
# 后处理推理数据
center, mask = sam_seg.backward_handle_output(results)
# 可视化
cv2.imshow("mask", mask)
cv2.waitKey(1)2. API参考
输入数据转化 sam_seg.forward_handle_input
# 预处理图片
color_frame = sam_seg.forward_handle_input(color_image)将图片转化为SAM可以处理的格式,有助于加速SAM的分割。
- 函数输入:RGB图像
- 函数输出:预处理的图像,可以直接放进推理接口执行,ndarray对象。
推理 sam_seg.detect
# 执行推理
results = sam_seg.detect(color_frame, predictor=predictor, point=TARGET_POINT, bboxes=None)执行推理,识别图片指定点位的mask并输出处理结果
- 函数输入:
- color_frame:预处理之后的彩色图像信息
- predictor:推理模型,可通过加载不同大小权重的模型来实现不同的推理速度和效果
- point:给定的辅助点位。
- bboxes:给定的辅助图像坐标点位框,与point二选一给定。
- 函数输出:推理结果。ndarray对象。
输出数据转化 sam_seg.backward_handle_output
# 后处理推理数据
center, mask = sam_seg.backward_handle_output(results)执行后续数据处理,将推理得到的数据转化为对应物体的轮廓和对应的中心点信息,中心点为最大外接矩形的中心点。
- 函数输入:推理结果。ndarray对象。
- 函数输出:
- mask:指定位置的mask信息。或称其为掩膜或轮廓。
- center:mask信息的最大外接矩形的中心点信息,一般认为这个点位是比较合适的抓取点。
3. 功能介绍
功能详解
给定彩色图片和指定点位坐标信息,可以得到指定点位的物体的分割信息,如图,蓝色为指定点位,下图为分割内容。
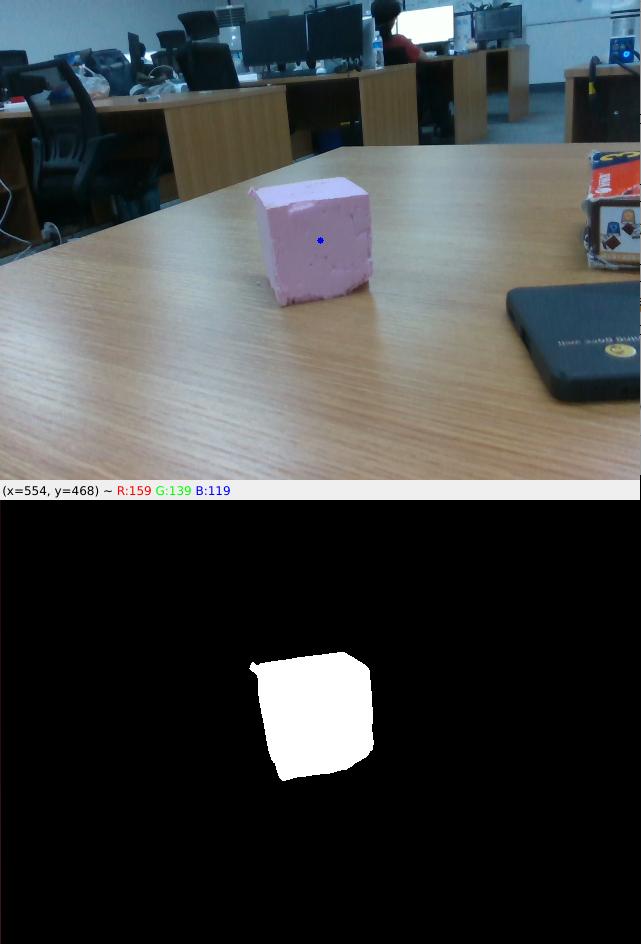
- 目标分割
在图像指定点位(x,y坐标系点位)给定一个辅助点,推理并给出这个辅助点所在物体的mask(掩膜或轮廓)信息,用于定位、追踪、判断形状等等功能。
SAM分割模型的输出是一组掩膜或轮廓,用于描绘图像中每个物体的边界。
功能参数
- 分割准确率:95%
- 分割速度:10HZ(基于3090TI测得)
- 模型参数:632M+4M
- 分割精度:1像素
4. 开发指南
图像输入规范
一般采用640x480x3通道的图片作为整个项目的输入,并使用RGB作为主要的通道顺序。一般推荐使用opencv方式读取的图片并传到模型中。
模型预热
当我们第一次加载模型之后,需要给模型一个数据,可以是随机数据来运行一次模型以达到预热模型的效果,此举主要的目的是将一些可能用到的内存空间分配到位。
部署设备
推荐使用cuda平台,纯CPU形式的推理速度会比较慢,基本无法满足现实场景需求。 指标参考:在3090TI GPU上运行约为100ms每帧,占用约4GB显存。
5. 见问题解答(FAQ)
1. 如果我不想用推荐环境配置,自行安装环境版本的选择顺序是什么?
操作系统 -> 显卡驱动版本 -> cudnn版本 -> cuda版本 -> torch版本 -> torchvision版本 -> python版本
按照以上顺序安装并适配。
2. 图像分割的速度主要受那些因素影响
主要受到硬件算力的影响,算力越高,推理时间越短。
3. 图像分割的结果不完整怎么办?
可以通过多次指定位置分割,将所有的mask拼凑到一起去,以达到一个完整物体的mask。
4. 如何在机械臂开发的过程中使用该模型?
通过指定点位得到目标物体的mask信息,通过mask可以计算出物体的最小外接矩形、最大外接矩形,并进一步得到物体的中心点、重心点、偏转角度等等。根据这些信息 + 深度图像 + 相机内参这些可以计算出物体基于相机坐标系的点,并进一步根据手眼标定结果计算出相对于机器人坐标系的点位。
5. 模型太大
本SDK主要采用Sam_b模型,推荐使用3060以上显卡运行。若您的硬件达不到要求,也可以使用Fastsam或其他资源要求较低的分割模型。但是为保证整体解决方案的准确性,建议升级硬件设备以满足更高精度要求。
6. 更新日志
| 更新日期 | 更新内容 | 版本 |
|---|---|---|
| 2024.08.16 | 新增内容 | V1.0 |
7. 版权和许可协议
- 本项目遵循MIT许可证。