SDK开发指南:
机械臂视觉伺服 一种适用于RM机械臂结合视觉实现视觉伺服的功能。视觉伺服通过视觉反馈控制机械臂,实现精准定位和动态环境下的自动操作。
基本方法 其中方法包括如下步骤:
- 采用任意方案确定在摄像头下需要追踪的物体的xyz坐标信息。
- 将坐标信息输入给到视觉伺服实例,将自动开始伺服。
使用场景 视觉伺服应用于自动化生产线、仓储物流、机器人抓取、精密装配等场景,依赖视觉反馈实时调整机械臂动作,实现高精度操作与动态环境中的自主作业。
目标用户
集成开发者 & 机械臂应用开发者:视觉伺服系统可用于将机械臂与视觉集成,应用于生产线装配、智能仓储等场景,提升自动化精度,缩短开发周期。
科研用户:支持科研人员在机器人视觉与控制领域进行算法优化、大模型测试等前沿探索,推动智能化应用研究。
教育用户:用于机器人视觉、控制实验教学,让学生实践理论知识,设计并完成相关实验项目。
1. 快速入门
基础环境准备
| 项目 | 版本 |
|---|---|
| 操作系统 | ubuntu20.04 |
| 架构 | x86 |
| 显卡驱动 | nvidia-driver-535 |
| Python | 3.8 |
| pip | 24.9.1 |
Python环境准备
| 依赖 | 版本 |
|---|---|
| opencv-python | 4.10.0.84 |
| loguru | 0.7.2 |
| spatialmath-python | 1.1.8 |
| roboticstoolbox-python | 1.1.0 |
(1)确保已经安装了基本环境
安装conda包管理工具和python对应环境,详细参考安装conda和python环境
(2)构建python环境
创建conda虚拟环境
conda create --name [conda_env_name] python=3.8 -y激活虚拟环境
conda activate [conda_env_name]查看python版本
python -V查看pip版本
pip -V更新pip到最新版本
pip install -U pip(3)安装python环境三方包依赖
安装opencv相关依赖,这会将numpy等相关依赖一并安装
pip install opencv-python==4.10.0.84安装日志相关依赖
pip install loguru==0.7.2安装spatialmath相关依赖,他会一并将Pillow、scipy相关包安装
pip install spatialmath-python==1.1.8安装机器人开发包roboticstoolbox-python
pip install roboticstoolbox-python==1.1.0若您在安装roboticstoolbox-python过程中出错或者安装完成无法使用,可以卸载之后下载源码重新安装。
git clone https://github.com/petercorke/robotics-toolbox-python.git
cd robotics-toolbox-python
pip3 install -e .代码获取
代码可以在github链接获取最新代码。
运行代码
# 实例化视觉伺服对象,传入相关的参数,参数介绍见
ibvs = ImageBaseVisualServo(
ip="192.168.1.18", # 机械臂IP地址
port=8080, # 机械臂透传端口
init_joint=[-2.288, -8.908, 97.424, -0.788, 88.872, -0.019], # 给定机械臂的初始位姿
center=[320, 240, 250], # 视觉伺服追踪点位对齐位置,前两位代表是画面像素点,表示将物体固定到这个位置上。
# 最后一位是机械臂末端到物体的距离,单位为mm
hand_to_camera=np.array([[-0.013, 1, -0.0004, -0.092], # 手眼标定矩阵
[-1, -0.013, 0.01, 0.03],
[0.009, 0.004, 1, 0.034],
[0, 0, 0, 1]])
)
# 定义线程和启动线程
thread2 = threading.Thread(target=ibvs.run)
thread2.start()
while True:
"""
以下为模拟每秒发一个坐标信息,实际的频率可以更高,最高上限200HZ
"""
time.sleep(1)
ibvs.center = [280, 200, 250]
time.sleep(1)
ibvs.center = [360, 200, 250]
time.sleep(1)
ibvs.center = [360, 280, 250]
time.sleep(1)
ibvs.center = [280, 280, 250]或使用如下示例,如下示例是基于任意物体识别的
# 实例化视觉伺服对象,传入相关的参数,参数介绍见
ibvs = ImageBaseVisualServo(
ip="192.168.1.18", # 机械臂IP地址
port=8080, # 机械臂透传端口
init_joint=[-2.288, -8.908, 97.424, -0.788, 88.872, -0.019], # 给定机械臂的初始位姿
center=[320, 240, 250], # 视觉伺服追踪点位对齐位置,前两位代表是画面像素点,表示将物体固定到这个位置上。
# 最后一位是机械臂末端到物体的距离,单位为mm
hand_to_camera=np.array([[-0.013, 1, -0.0004, -0.092], # 手眼标定矩阵
[-1, -0.013, 0.01, 0.03],
[0.009, 0.004, 1, 0.034],
[0, 0, 0, 1]])
)
# 定义线程和启动线程
thread2 = threading.Thread(target=ibvs.run)
thread2.start()
# 伪代码,加载视频流对象
camera = RealSenseCamera()
# 伪代码,加载识别模型
model = detect.gen_model()
# 指定需要追踪的物体
input = "Fang_Kuai"
while True:
# 伪代码,获取视频流
color_img, depth_img, _, _, _aligned_depth_frame = camera.read_align_frame(False, False)
# 伪代码,进行识别推理并返回"Fang_Kuai"物体的中心点,中心点由mask计算得到
annotated_frame, center, _ = model(color_img, object_name=input) # 进行推理
# 取深度值
z = depth_img[int(center[1])][int(center[0])]
# 构建规范化的center值
center.append(z)
# 赋值
ibvs.center = center
# 可视化内容
cv2.imshow("annotated_frame", annotated_frame)
if cv2.waitKey(1) & 0xFF == ord("q"):
break2. API参考
视觉伺服启动
ibvs = ImageBaseVisualServo(
ip="192.168.1.18", # 机械臂IP地址
port=8080, # 机械臂透传端口
init_joint=[-2.288, -8.908, 97.424, -0.788, 88.872, -0.019], # 给定机械臂的初始位姿
center=[320, 240, 250], # 视觉伺服追踪点位对齐位置,前两位代表是画面像素点,表示将物体固定到这个位置上。
# 最后一位是机械臂末端到物体的距离,单位为mm
hand_to_camera=np.array([[-0.013, 1, -0.0004, -0.092], # 手眼标定矩阵
[-1, -0.013, 0.01, 0.03],
[0.009, 0.004, 1, 0.034],
[0, 0, 0, 1]])
)
# 定义线程和启动线程
thread2 = threading.Thread(target=ibvs.run)
thread2.start()
# 输入数据
ibvs.center = [xxx, xxx, xxx]实例化视觉伺服的类,实例化之后启动线程,之后开始输入数据,线程将自动按照点位来移动机械臂。
- 实例化输入:
- ip: 机械臂IP地址
- ort: 机械臂透传的端口
- init_joint: 机械臂的初始位置
- center: 视觉伺服追踪点位对齐位置,前两位代表是画面像素点,表示将物体固定到这个位置上。最后一位是机械臂末端到物体的距离,单位为mm
- hand_to_camera: 手眼标定矩阵
- 函数输入: center: 物体轮廓信息
- 函数输出: 无,主要是机械臂运动。
3. 功能介绍
使用条件
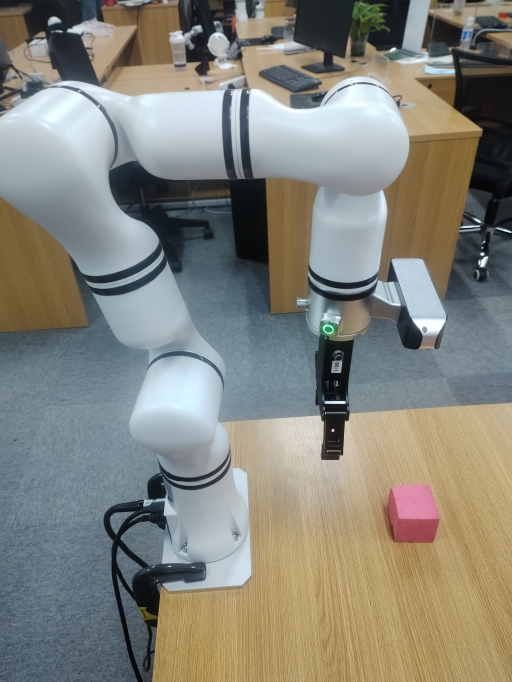
- 机械臂需要正装在桌面上,伺服位置必须在摄像头检测范围内。如下图参考安装:
功能详解
通过一些视觉方法(比如图像识别、角点追踪等等)得出要检测的点位信息,拿到物体相对于画面的xy信息,再加上当前的深度信息。组成一个基于相机坐标系的点。将该点输入到实例化好的视觉伺服类里,代码将自动驱动机械臂开始追踪该点位。同时建议输入的点位足够的密和柔顺,这样机械臂在运动过程中会更加丝滑。
实例化参数
机械臂IP,一般默认192.168.1.18
机械臂透传端口,一般默认8080
初始化位置,机械臂初始位置
初始化伺服对齐位置,比如画面中心点位置,需符合点位规范机械臂当前的手眼标定内容输入参数
通过画面计算得到的物体点位信息,需符合点位规范
功能参数
- 伺服频率:最大200HZ
- 伺服精度:平面方向1像素,深度方向1mm
4.开发指南
长度输入规范
本案例中所有的长度单位均是以mm为单位的。
点位规范
点位规范为:
center=[320, 240, 250]center的前两位是画面坐标系的xy位置,单位为像素,第三位是机械臂末端到物体的距离,单位为mm。
手眼标定结果规范
手眼标定结果规范:
hand_to_camera = np.array(
[[0.012391991619246201, 0.9775253241173848, -0.21045350853076827, -0.06864240753156699],
[-0.9998988955501277, 0.01358205757415265, 0.0042102719255664445, 0.0435019505437101],
[0.006974039098208998, 0.21038005709014823, 0.9775948007008847, -0.0005546366642718483],
[0, 0, 0, 1]])5.常见问题解答(FAQ)
(1)我需要设置视觉伺服运动过程中的速度吗?
不需要设置运动速度,机械臂会通过计算得到的joint值自动进行轨迹规划,并实现柔顺运动。
(2)我一般怎么得到输入值center?
输入值center的前两位是相机图像的x,y,我们可以通过比如:识别、分割、追踪来得到物体的mask,通过mask计算中心点得到x,y;确认点位之后,通过光流法追踪物体点位在画面中的xy位置;通过角点追踪物体的xy位置等等。center的第三位是距离信息,一般使用摄像头xy位置的深度信息即可。
(3)目前支持RM65型号以外的机械臂吗?
需要通过设置一下机器人参数即可实现其他机械臂的视觉伺服,具体型号的机械臂参数请联系睿尔曼技术支持。
(4)目前是仅支持机械臂正装在桌面并目视桌面的构型吗?
是的,其他位置由于其坐标信息转化需要改,若有具体需求需要额外适配。
6. 更新日志
| 更新日期 | 更新内容 | 版本 |
|---|---|---|
| 2024.10.12 | 新增内容 | V1.0 |
7. 版权和许可协议
- 本项目遵循MIT许可证。