博客:
关于水滴2到点误差大以及避障距离过长的解决方法 地图类型区别以及28号点位类型解析
1. 地图类型区别:
- V1地图更为细腻,设备运行时定位效果更好,可兼容水滴其它机型及地图,但对于大型及复杂场景建图效果不好;
- V2在大场景及复杂场景下更方便建图,且支持地图续扫,但地图较为粗犷,定位效果相对V1较差,在需要高定位且场景不会很复杂的情况下可以优先选择V1建图。
2. 28号点位类型解析: 28点位是依靠实时获取的激光数据和当前地图的匹配度来实现定位的,因此所处的物理环境需要相对固定,尽可能的避免人员、宠物等可移动物体的随意走动。
注意:
建议需要精准停靠的位置(即底盘设备中心位置)四周70cm内不要有障碍物,例如墙体等。
建图和校正
建图
在机器人的web页面中,进入
地图管理页面,点击创建地图,然后输入地图名和楼层,点击创建地图。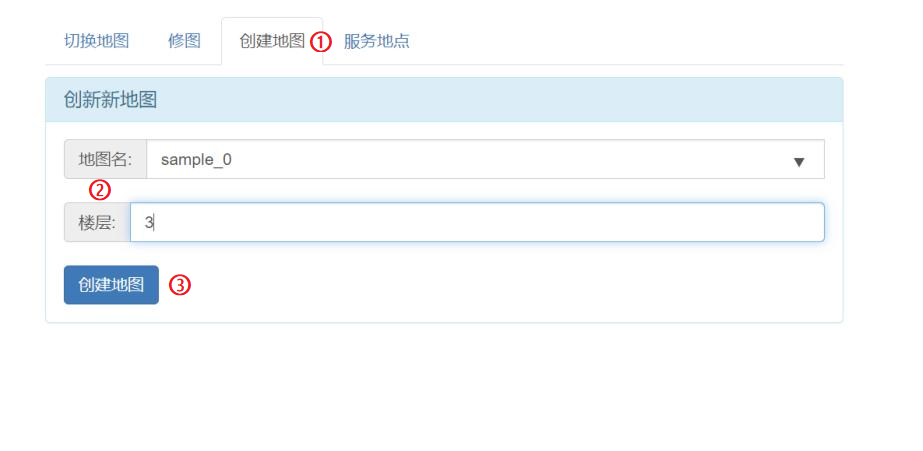
页面将会跳转至扫图选择页面,默认为
V2 扫图,请点击左侧V1扫图,并选择小图。
此时机器人会进入扫图模式,红色为激光雷达实时扫描到的物体,蓝色三角为机器人,如下图所示。
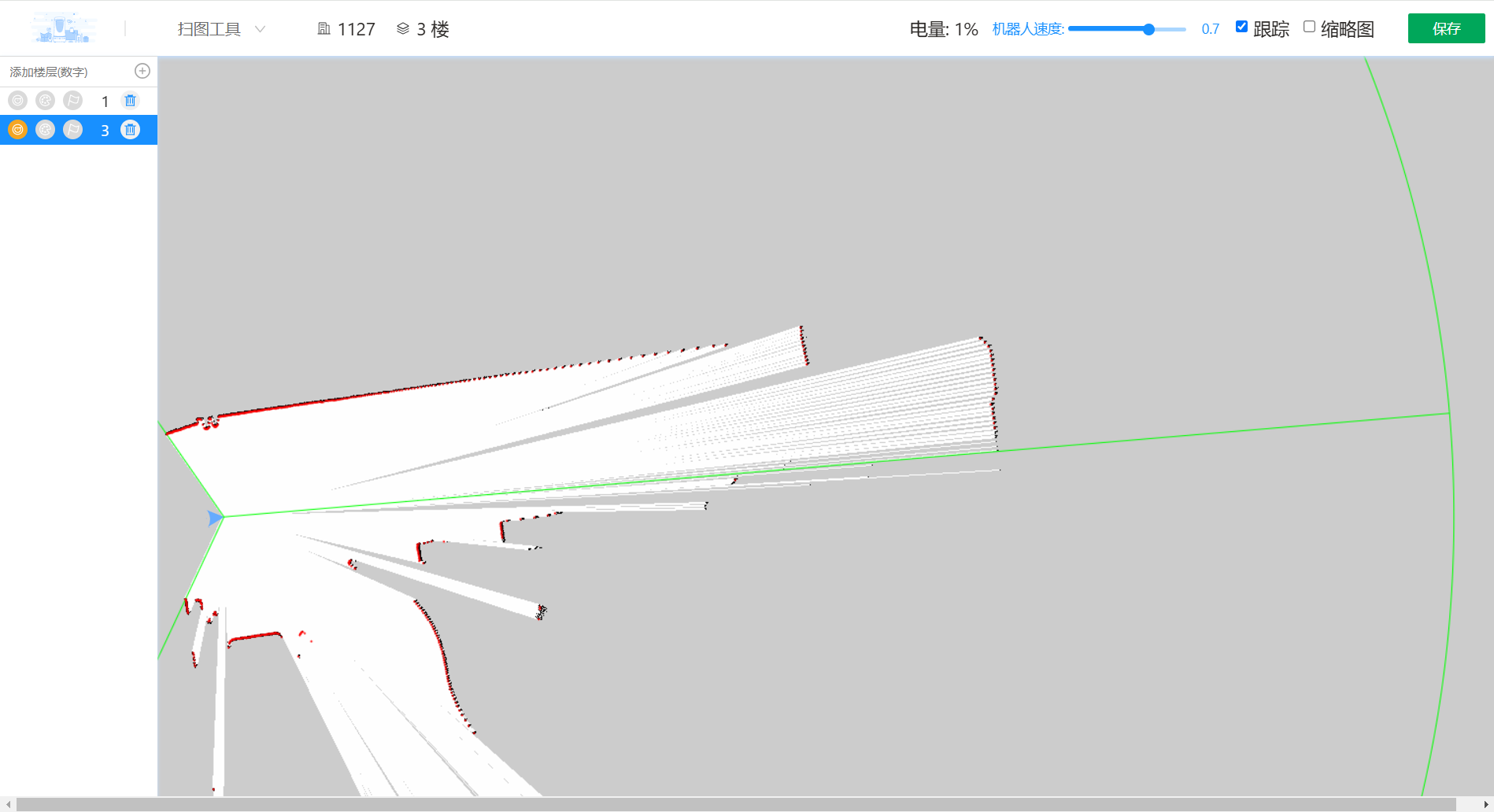
此时可通过按下键盘的i、j、k、l分别对机器人进行前后左右控制来完成地图,这里就不作过多阐述。
校正
当加载上一步建好的地图后,发现激光雷达实时扫描的物体与地图轮廓不符时,需要手动点击校正,使得扫描的物体与地图轮廓完全匹配,否则会出现定位不准确,机器人乱走的现象。
按下硬急停按钮或点击机器人web页面中软急停,再将机器人手动推动到目标点位,调整好机器人位姿,释放掉急停,点击标点位,选择当前位置增加点位。
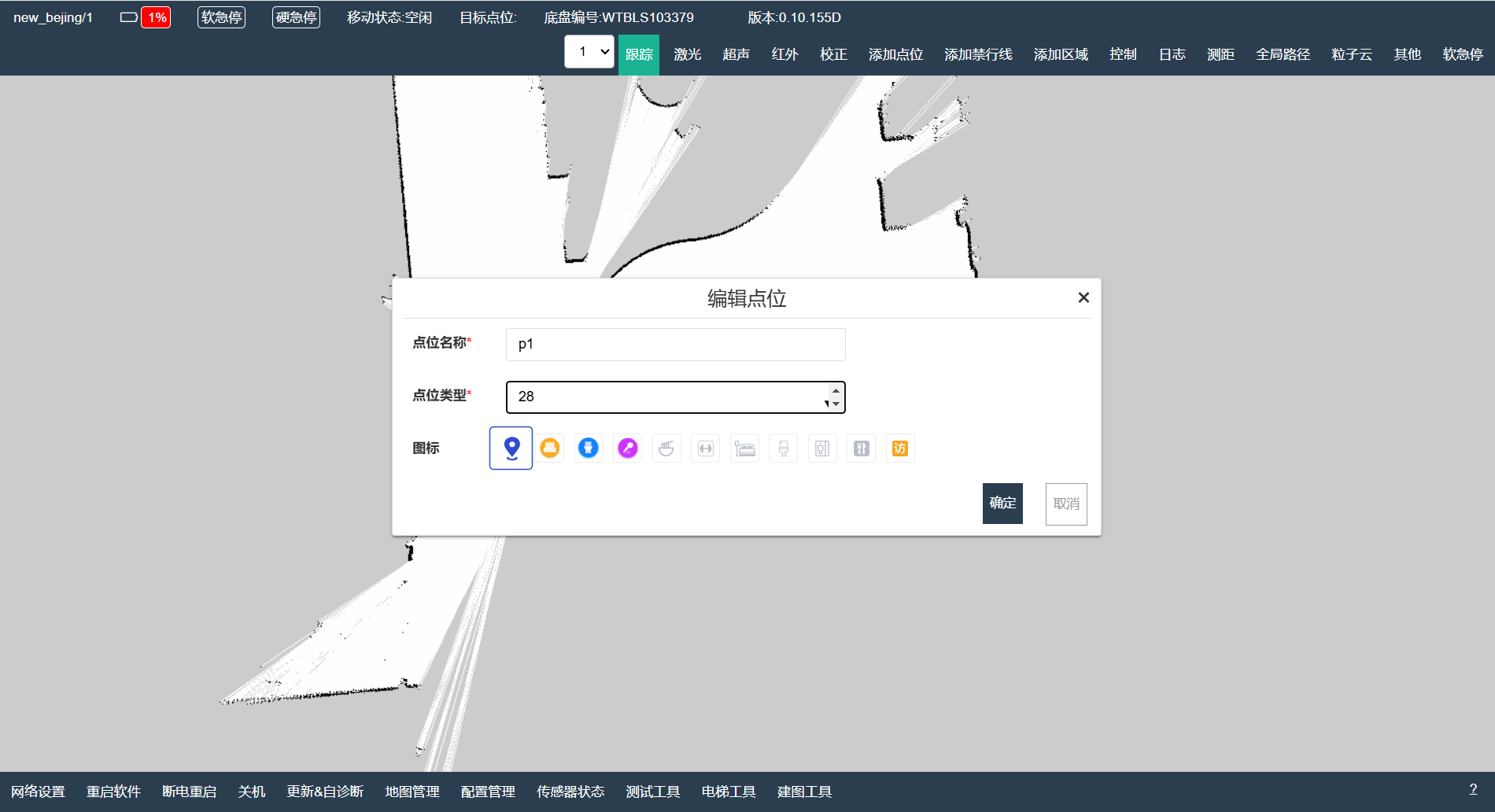
如上图,此处设置点位名称为p1,点位类型为28,再点击确定可根据上述内容重复标记多个点位。
配置管理设置
在机器人web页面中的配置管理页面,可根据需要自定义配置,请参考如下描述进行配置。
- 设置
安全停靠距离为关闭。 - 设置
到点位置容差为最小值0.05m。 - 设置
到点角度容差为最小值0.05rad。
然后,点击左下角保存配置对设置的内容进行保存。
最终效果
- 停靠距离误差参考值2~5cm。
- 角度偏差参考值 3°~5°。