博客:
使用串口实现机械臂UDP回传 确保电脑和机械臂连接成功
首先确保电脑和机械臂连接成功,二者ip需设置到同一网段下。(本次教程的机械臂IP是192.168.10.18,电脑IP是192.168.10.111)。
按下win+R快捷键打开运行窗口,输入cmd并按下回车键以打开命令提示符窗口。输入如下命令,若有如下返回,则证明连接成功。
ping 机械臂IP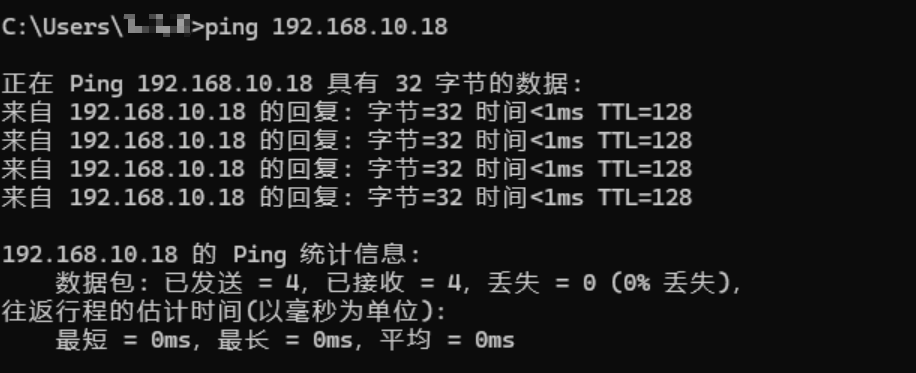
关闭电脑防火墙和安全设置
由于电脑的防火墙、杀毒软件可能会进行误拦截,所以需要关闭上位机(回传的目标设备)的所有防火墙和杀毒软件。 这里不涉及杀毒软件相应设置的关闭方法,不同杀毒软件关闭方法自行百度。
关闭Windows Defender防火墙
按下
win+R快捷键打开运行窗口,输入control并按下回车键以打开控制面板。
点击
系统和安全。
点击
Windows Defender防火墙。
点击
启用或关闭Windows Defender防火墙。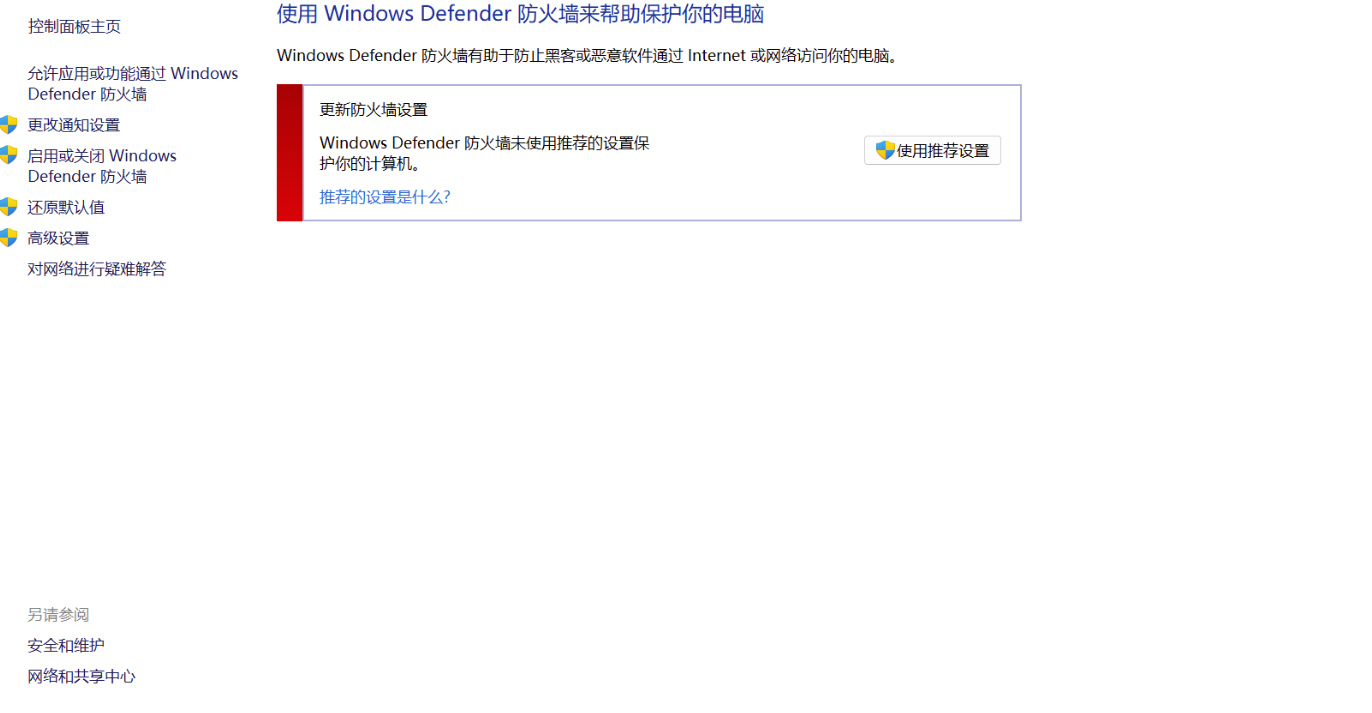
关闭 Windows Defender防火墙,并点击
确定。
关闭Windows安全设置
点击电脑
开始菜单栏,并选择设置。
选择
隐私和安全性,点击Windows安全中心。
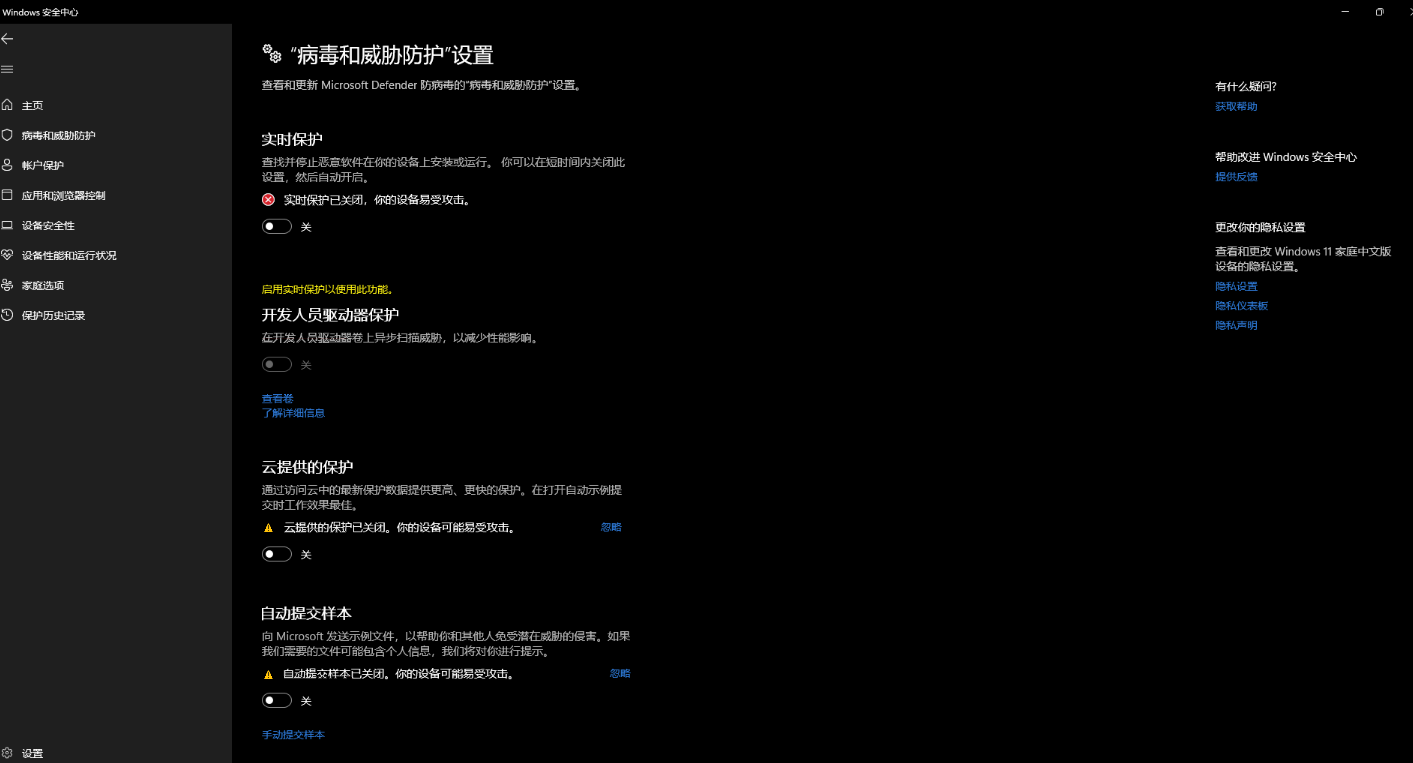
选择
病毒和威胁防护,找到Microsoft Defender防病毒选项,关闭各类保护。
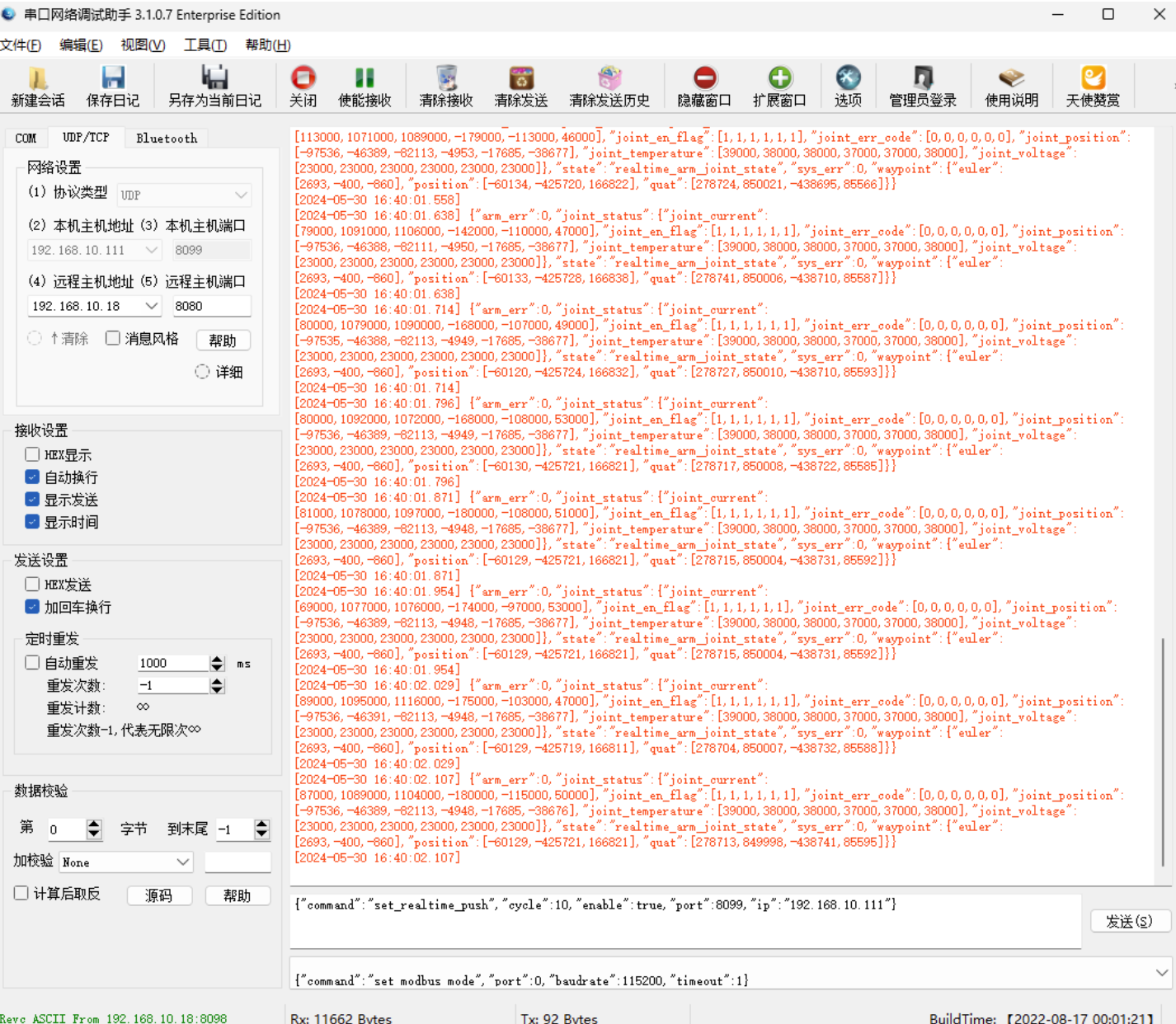
配置UDP回传
打开缤果串口,选择协议类型为
TCP Client。在
远程主机地址和远程主机端口输入机械臂的IP地址和端口号(笔者的机械臂IP为192.168.10.18,端口号为8080)。点击
打开,开启TCP模式。输入JSON指令。
json{"command":"set_realtime_push","cycle":10,"enable":true,"port":8099,"ip":"192.168.10.111"}JSON指令说明请参考:设置 UDP 机械臂状态主动上报配置set_realtime_push。
点击
发送。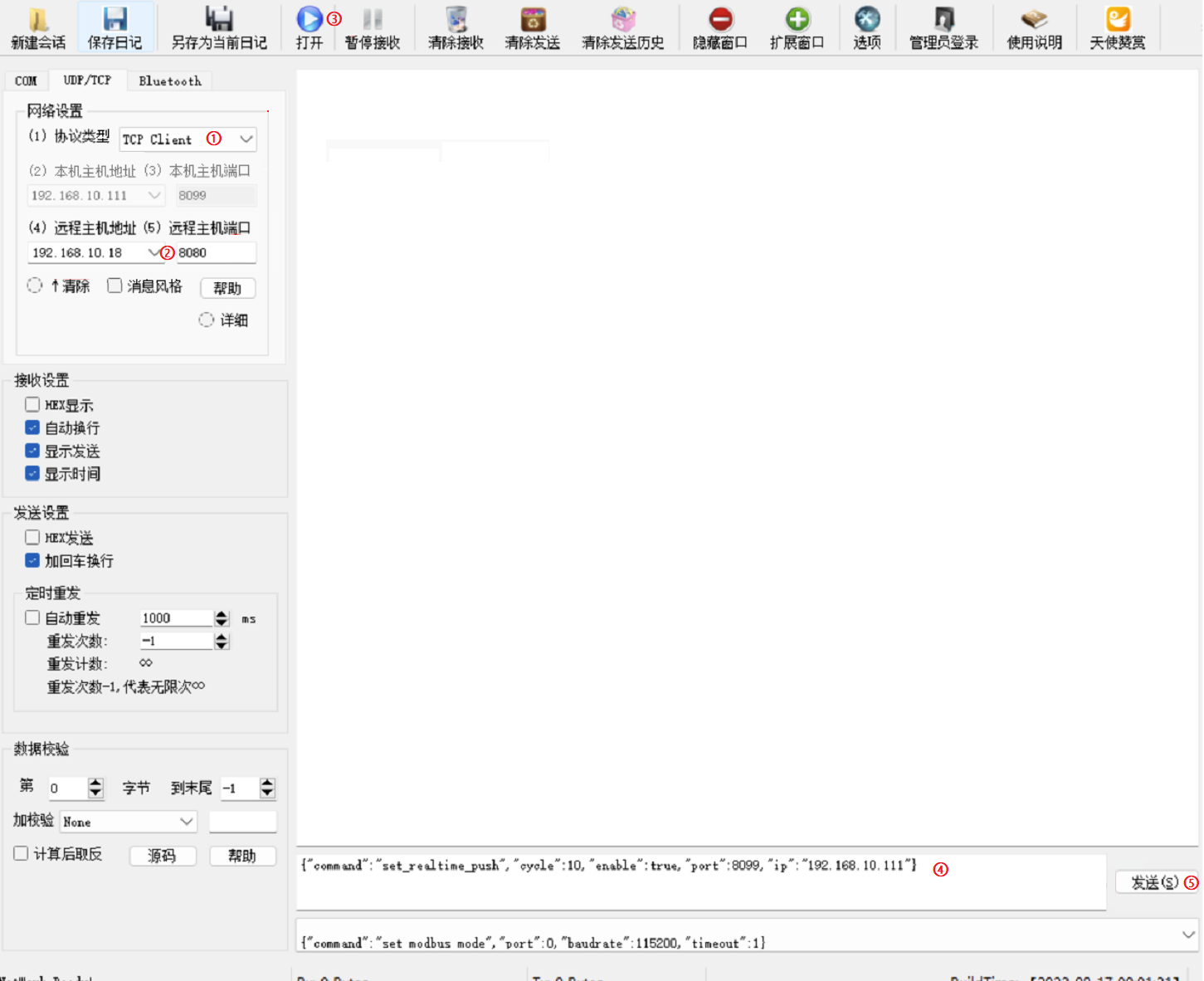
出现
{"command":"set_realtime_push","state":true},即为发送成功。如下图所示: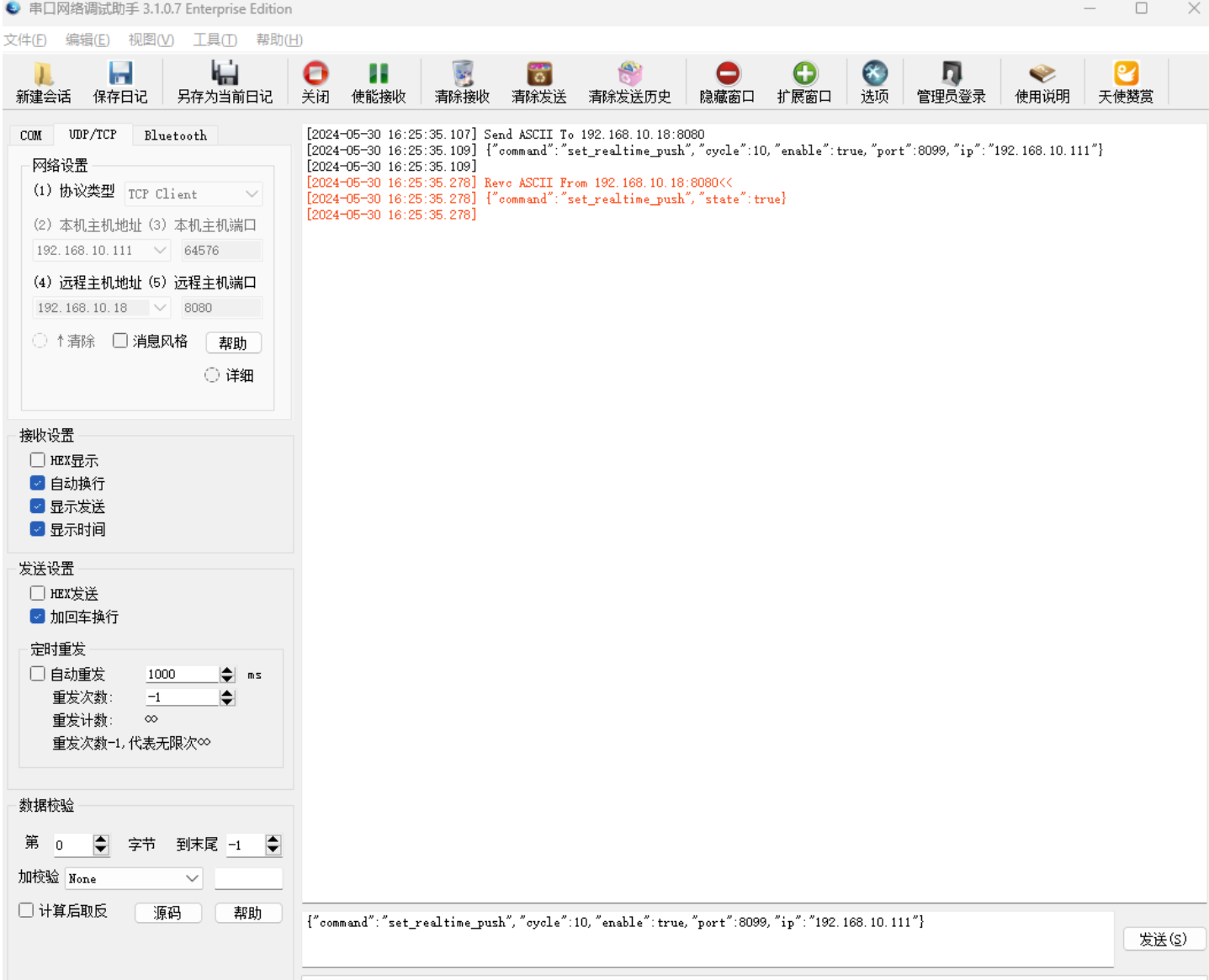
点击
关闭,退出TCP模式。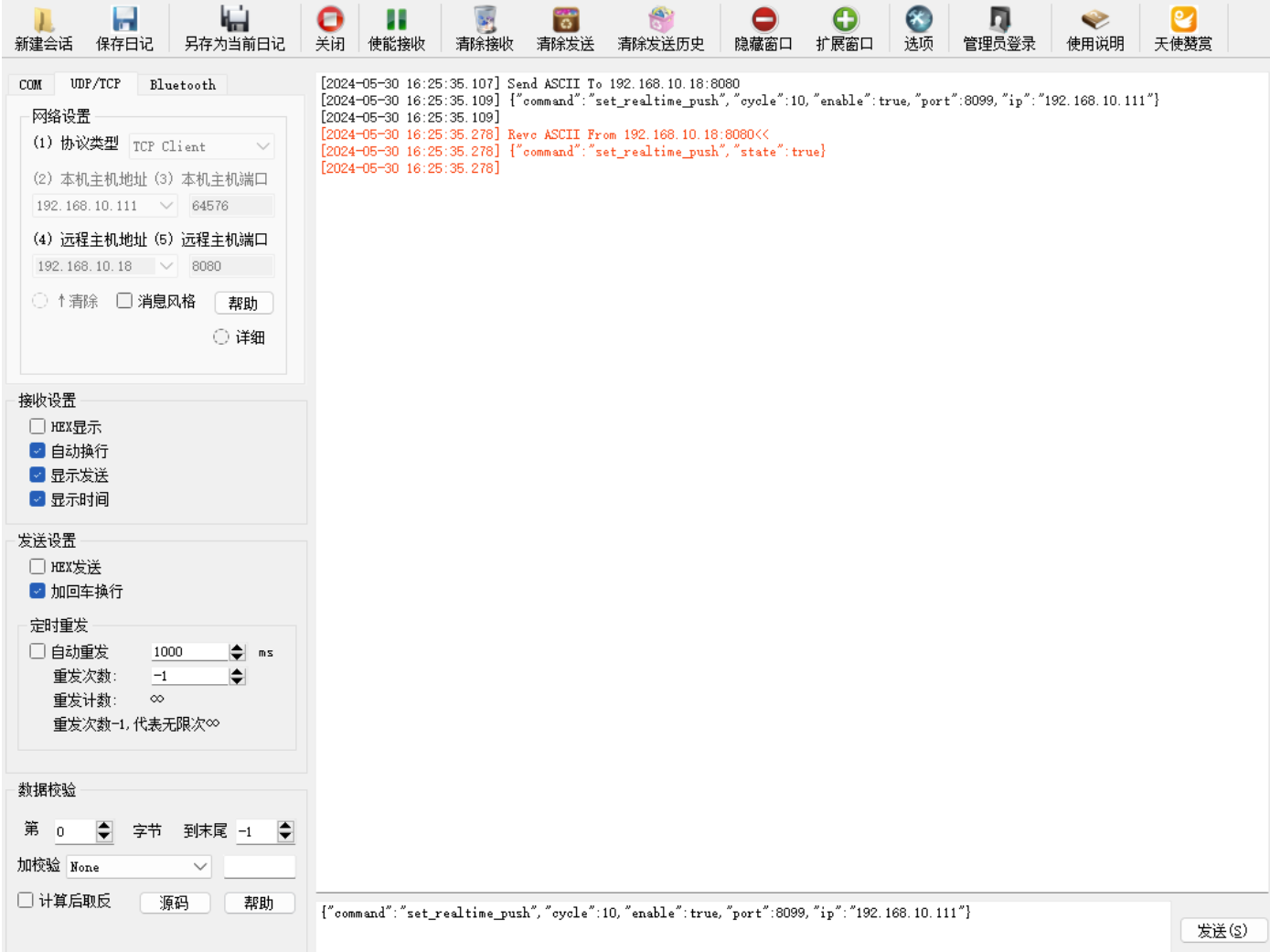
选择协议类型为
UDP。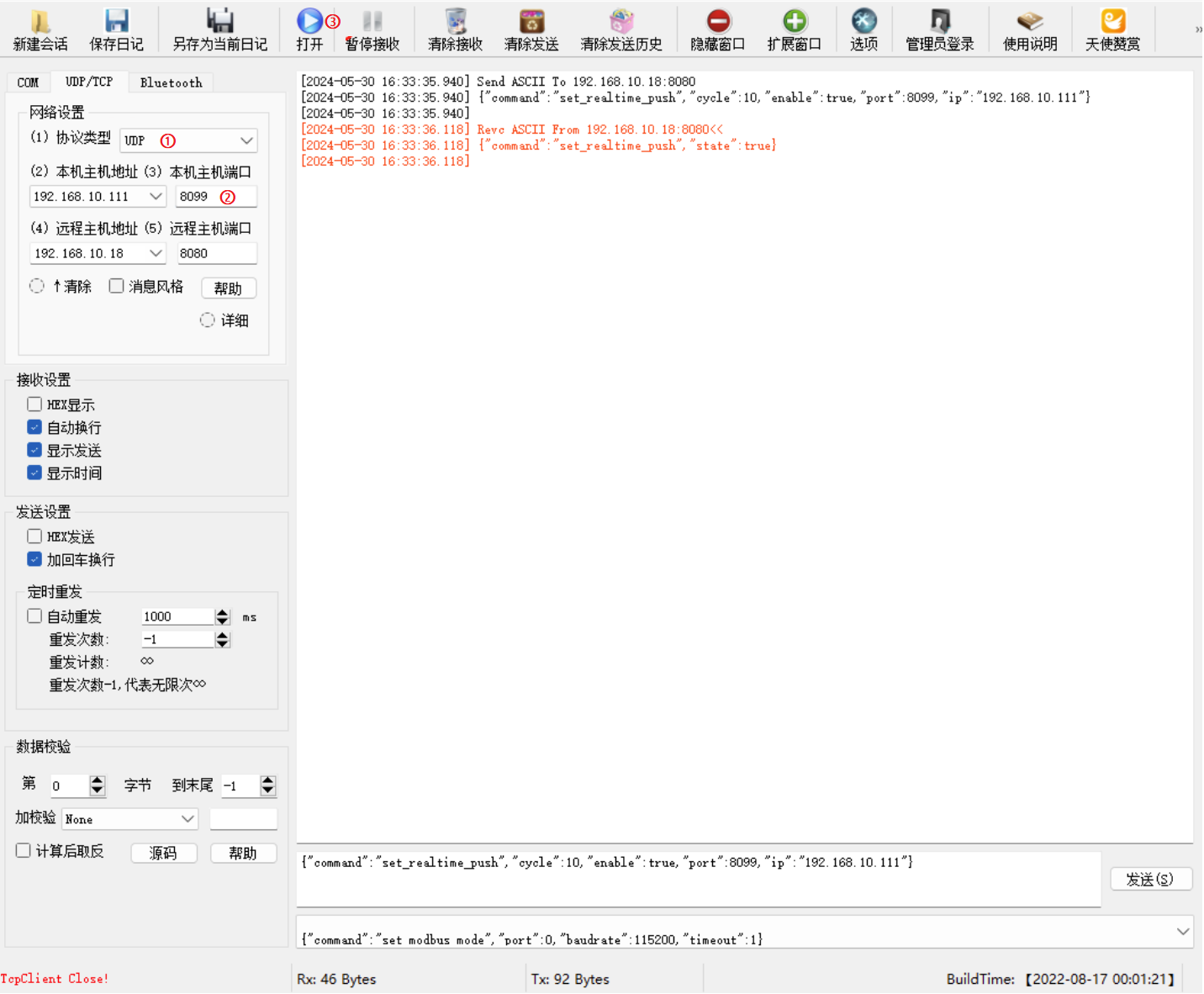
设置本机主机端口为json指令中自定义的port值,本次设置的值为8099。
点击
打开,开启UDP回传模式。机械臂以所设置的周期实时回传机械臂当前状态。