博客:
机械臂奇异阈值调参说明 核心概念:最小奇异值
机械臂的最小奇异值是衡量其当前构形下奇异程度的核心指标,同时也可直观反映机械臂在各运动方向上的可操作能力强弱。
- 数值越大,机械臂越远离奇异状态,可操作度越大。
- 数值越小,机械臂越接近奇异状态,可操作度越小。
最小奇异值的计算逻辑
最小奇异值的计算是通过对当前构型下的雅克比矩阵执行奇异值分解操作实现的,分解后会得到一个最小奇异值矩阵。该矩阵对角线上的 6 个元素,分别对应机械臂在 x、y、z、r、p、y这六个运动方向上的奇异值。而这些奇异值的大小,直接定义了机械臂在当前时刻各运动方向上的可操作度。
判断机械臂奇异特性时,通常以 6 个奇异值中的最小值为依据。依据短板效应,最小奇异值决定了机械臂当前的整体奇异特性。
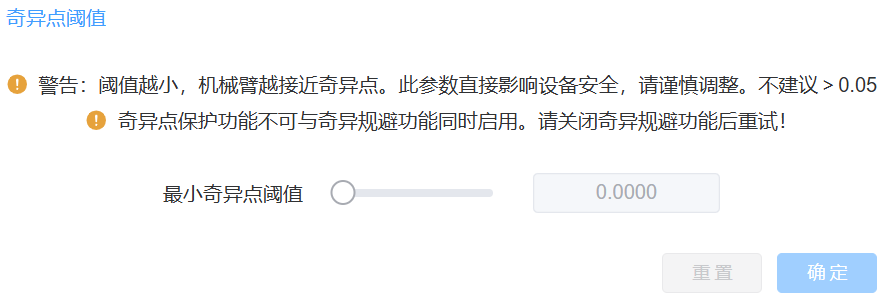
阈值参数调节
为让用户根据实际需求控制机械臂对奇异状态的敏感度,示教器界面提供了奇异点阈值参数调节功能,其调节逻辑与效果直接关联机械臂的报警触发时机:
| 奇异阈值调节方向 | 对奇异的敏感度 | 核心影响(报警触发时机) |
|---|---|---|
| 阈值调大 | 感知更敏感 | 机械臂距离奇异状态尚远时,系统就会触发奇异报警,提前规避风险。 |
| 阈值调小 | 感知更迟钝 | 机械臂需更接近奇异状态,系统才会触发报警,可保留更多操作空间。 |
默认值与调节建议
默认参数设定
系统默认的奇异阈值为 0.01。
分场景参数调节
奇异阈值参数的调节本质是在安全预警灵敏度与操作空间利用率之间寻求平衡,用户需结合具体任务的负载、精度、运动范围要求,以及现场安全规范等,制定个性化的参数设置方案,避免因参数不当导致效率损失或设备风险。
需下调阈值的场景:在部分特殊场景中,即使机械臂的实际奇异值低于 0.01,其仍可能在特定运动方向上具备满足任务需求的可操作能力。若此时保持阈值为 0.01,系统会提前触发不必要的报警,导致这部分本可利用的操作空间被浪费,影响任务效率。这种情况下,用户可根据实际任务的负载、精度要求,适当下调阈值,以充分利用操作空间。
需上调阈值的场景:若用户在使用过程中发现,默认的 0.01 阈值过于宽松,导致系统对奇异状态不够敏感,可适当上调阈值,提升报警灵敏度。但需特别注意:阈值设置得越高,系统触发报警的时机越早,虽能提升安全性,却可能牺牲机械臂在临近奇异点区域的部分操作冗余空间。
特殊参数说明
若将阈值直接设置为 0,则相当于完全关闭奇异点报警功能。
注意
此设置仅建议在专业人员指导下,针对特殊的实验性场景临时使用,常规任务中严禁设置为 0。关闭报警后,机械臂接近奇异点时无任何提醒,极易引发机械臂故障。