博客:
遥操专用求解器API接口使用说明 核心逆解 API 解析
逆解初始化rm_algo_ik_remote_init
作为遥操 / 避奇异场景的专用逆解初始化接口,其核心作用是为后续逆解计算奠定基础。
提醒
需确保用户下发的位姿差分量除以下发周期后,得到的速度不要超过示教器安全配置中的最大限速阈值。
逆解本体函数rm_algo_ik_remote
逆解计算的核心执行函数,负责完成笛卡尔空间连续位姿的求解运算。
提醒
该专用逆解仅适用于笛卡尔空间连续位姿求解,不能用于类似于movj_p的点到点的求解功能。
建议使用流程:先在仿真环境中验证下发位姿的准确性与运动合理性,无异常后再切换至真实模式运行,避免真机调试风险。
注意
为保证机械臂正常运行,操作时请确保肘关节(七轴机械臂的关节4/六轴机械臂的关节3)不处于完全伸直状态(即关节角为0°)。当关节伸直后仍持续朝边界外运动时,由于边界奇异性的特性,可能引发机械臂振荡、回程困难等不可预测的现象。建议通过提供的限位设置接口,或在示教器的安全配置页面中设定关节软限位,为肘关节设置非零的限位。具体限位值可在仿真环境中调试确定后,再应用于实际系统。
该功能已内置各关节的软限位保护机制,但仍建议在正常运动范围内操作,避免触及软限位边界。若关节已达软限位却仍需向限位外方向运动以满足目标位姿,则容易因运动约束冲突导致机械臂振荡或出现其他不确定运动状态。
位姿跟踪权重配置rm_algo_set_error_weight
用于自定义末端位姿(x、y、z、ax、ay、az)各分量的跟踪权重。
权重数值直接关联笛卡尔空间对应方向的求解精度 —— 权重越大,该方向的位姿跟踪精度越高。
如果不主动调用该接口,系统会默认所有分量的跟踪权重均为 1(该默认值适用于大多数场景,无需额外调整)。参数取值范围:0.01~1.0。
关节限速函数rm_algo_set_dq_weight
当发现某一关节运动速度过快、过于猛烈时,可通过该接口调节对应关节的限速权重。默认状态下所有关节限速权重为 1.0(无额外限速),参数取值范围:0~1.0。
提醒
限速设置可能会导致末端位姿出现轻微跟踪误差,需在运动平稳性与跟踪精度之间找到平衡。
自定义关节限位rm_algo_set_joint_limit_angle
针对机械臂运动中的 “防打直”“防肘部内扣” 等需求设计的限位接口,可根据实际场景灵活设置关节运动范围。核心配置规则:
6 轴机械臂:防打直关节为肘部关节(关节 3)。
7 轴机械臂:防打直关节为肘部关节(关节 4),同时支持关节 3 的限位设置(因7轴机械臂有零空间运动的概念,需关节 3 与关节 4 协同作用才能达到肘部限制的一个效果)。
注意
关节初始角度不得超出设置的限位范围。
若开启七轴肘部追踪功能,则需注意限位冲突。
七轴专属-肘部控制使能rm_algo_enable_q3_tracker
仅支持七轴冗余机械臂的肘部控制功能,其核心原理是通过追踪关节 3 的运动状态间接实现肘部姿态控制。
七轴关节 3 追踪目标角度rm_algo_set_7dof_q3_track_angle
用于设定七轴机械臂关节 3 的追踪目标角度。需明确:该接口并非让关节 3 瞬间精准到达目标角度,而是通过零空间运动为关节 3 提供运动导向 —— 若运动时间趋于无穷,关节 3 会逐渐收敛至目标角度。
提醒
设置的目标角度需避开已配置的关节限位范围,防止运动冲突。
肘部追踪等级rm_algo_set_q3_tracker_velocity_level
专门调节七轴机械臂肘部追踪的响应速度,参数取值范围 0~1.0。
数值越大,零空间运动的响应越迅猛,关节 3 向目标角度收敛的速度越快。
需根据实际运动场景灵活调整,避免因追踪速度过快导致肘部姿态突变。
实战案例
以 RM75B 机型作为人形臂右臂应用场景为例,通过限位设置与肘部追踪功能的组合,来给逆解加上约束,实现更自然的拟人化姿态。
问题场景
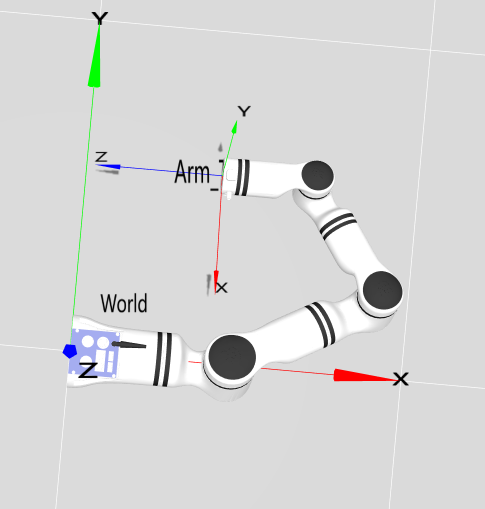
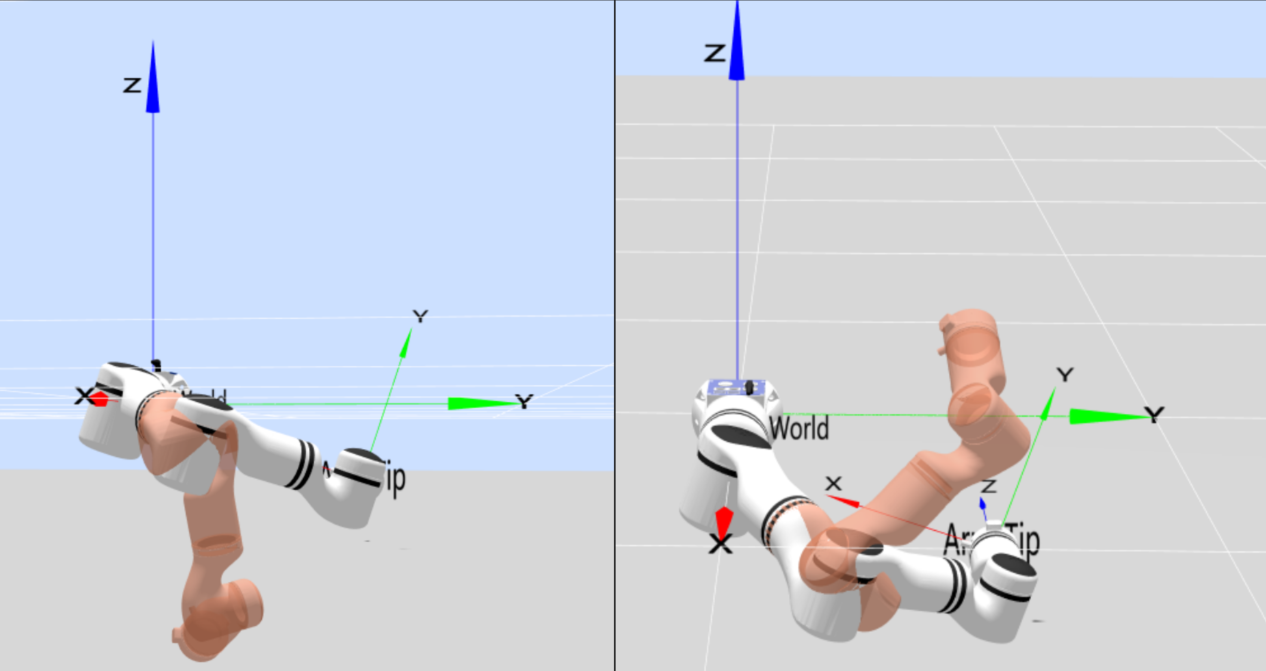
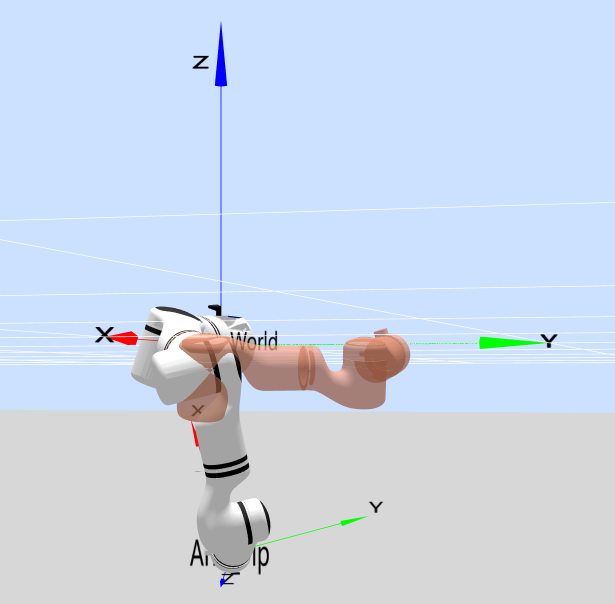
在机械臂运动过程中,容易出现如图2所示的肘部内扣构型,这种姿态不仅不符合人体运动习惯,还可能导致机械臂与周边环境发生碰撞,影响运动安全性。
解决方案
为肘部关节(关节4)加上限位
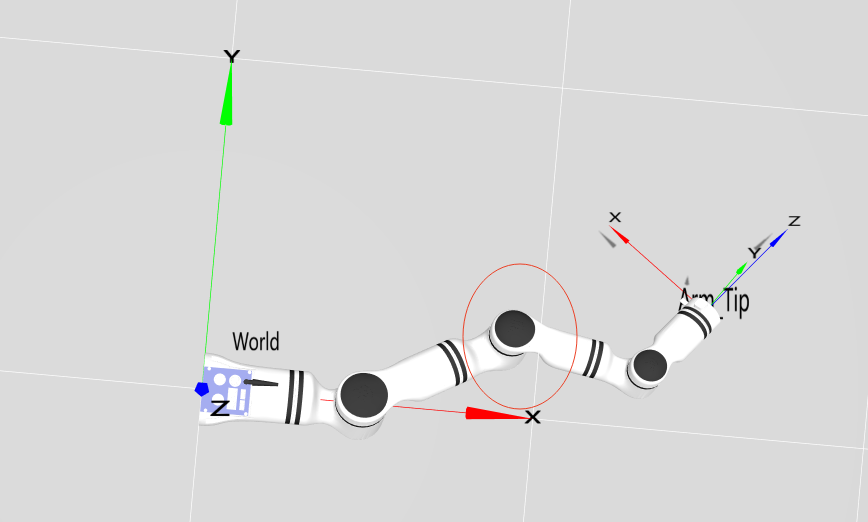
图2中的内扣问题(关节 4 角度为 - 40 度),可将关节 4 的最小限位设置为 3 度,通过加入限位约束,使得机械臂运动过程中关节不会向小于3度的方向运动,从而可以让肘部一直朝外从而避免内扣的出现(我司六轴机械臂肘部限制同理),如图3所示:
为肘部关节(关节4)加上限位+为关节3加上约束
七轴机械臂作为冗余构型设备,具有零空间运动特性,仅靠单一关节限位无法完全解决肘部内扣问题,需要设置关节4限位的同时还需要给关节3加上约束。
关节3的转动带来肘部内扣:
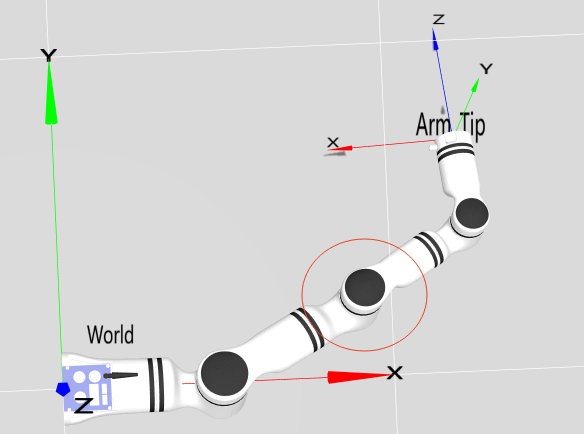
如图4所示,即使其他关节保持最优构型,关节 3 的异常转动仍会导致肘部内扣。
关节4约束+关节3约束
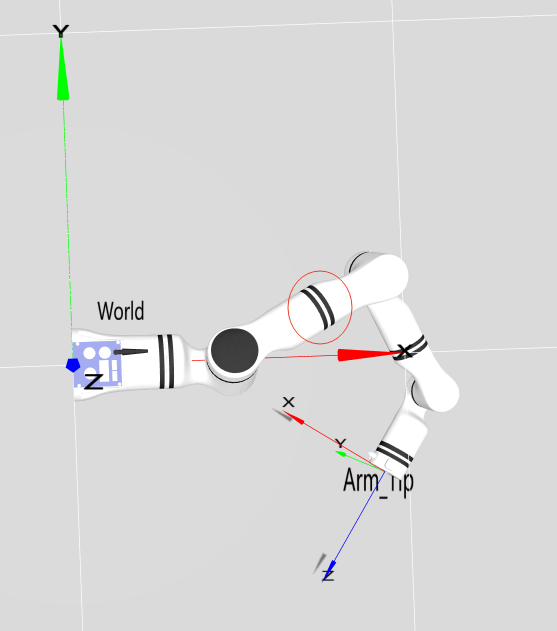
针对七轴机械臂来说其肘部的限制除了依赖于关节4的约束还依赖于关节3的约束,如图5所示的红色虚拟模型中关节3的位置分别是-60度与60度,所以可以通过添加关节3的最大最小限位为60度与-60度来对关节3的位置进行约束,防止出现图4中出现的因关节3转动导致的肘部内扣问题。
肘部追踪功能
针对七轴还可以使用肘部追踪的功能,其也是通过控制关节3间接实现,以图5左侧图为例,若希望超正常构型运动,则应以图6的红色虚拟模型为目标,当前红色虚拟模型的关节3角度为16度,所以就可以开启七轴的肘部追踪功能并将关节3的追踪角度设置为16度,随着运动的过程机械臂会做零空间运动并朝着这个正常的构型去运动。
总结与使用建议
六轴机械臂:肘部限制方案仅需通过限制肘部关节(关节 3)的限位来实现。
七轴机械臂:肘部限制方案需灵活巧妙结合关节3、关节4的限位约束与肘部追踪功能来实现。
通过这套逆解 API 接口的灵活运用,可轻松实现机械臂在遥操、避奇异等场景下的稳定控制,结合拟人化限位与追踪策略,让机械臂运动更符合人体工程学,适配更多高精度应用场景。