博客:
RM_ARM+ 协议调试工具使用说明 准备工作
工具获取
末端生态协议工具现已开放下载,点击链接即可获取:末端生态协议工具官网。
硬件连接
电脑连接:使用485转USB线连接电脑。
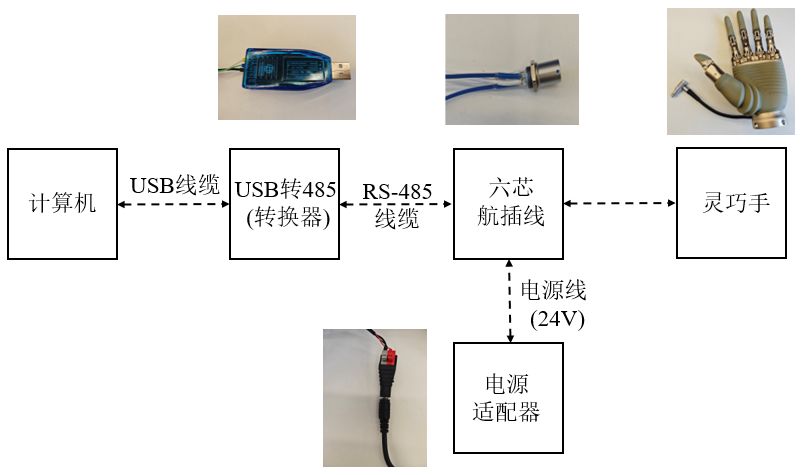
手臂连接:通过航插线连接至灵巧手对应端口,请注意对准红/蓝标记点,确保接口对齐。
灵巧手具体硬件接口可参考下图:
 |
|---|
参数配置
通信监视
可通过串口实时监测通讯数据,包括发送数据、接收数据与数据格式等信息,最高支持 50Hz通信频率,便于开发者进行数据传输分析与调试。
串口配置
串口号选择:从下拉菜单中选取当前设备连接的通信端口。
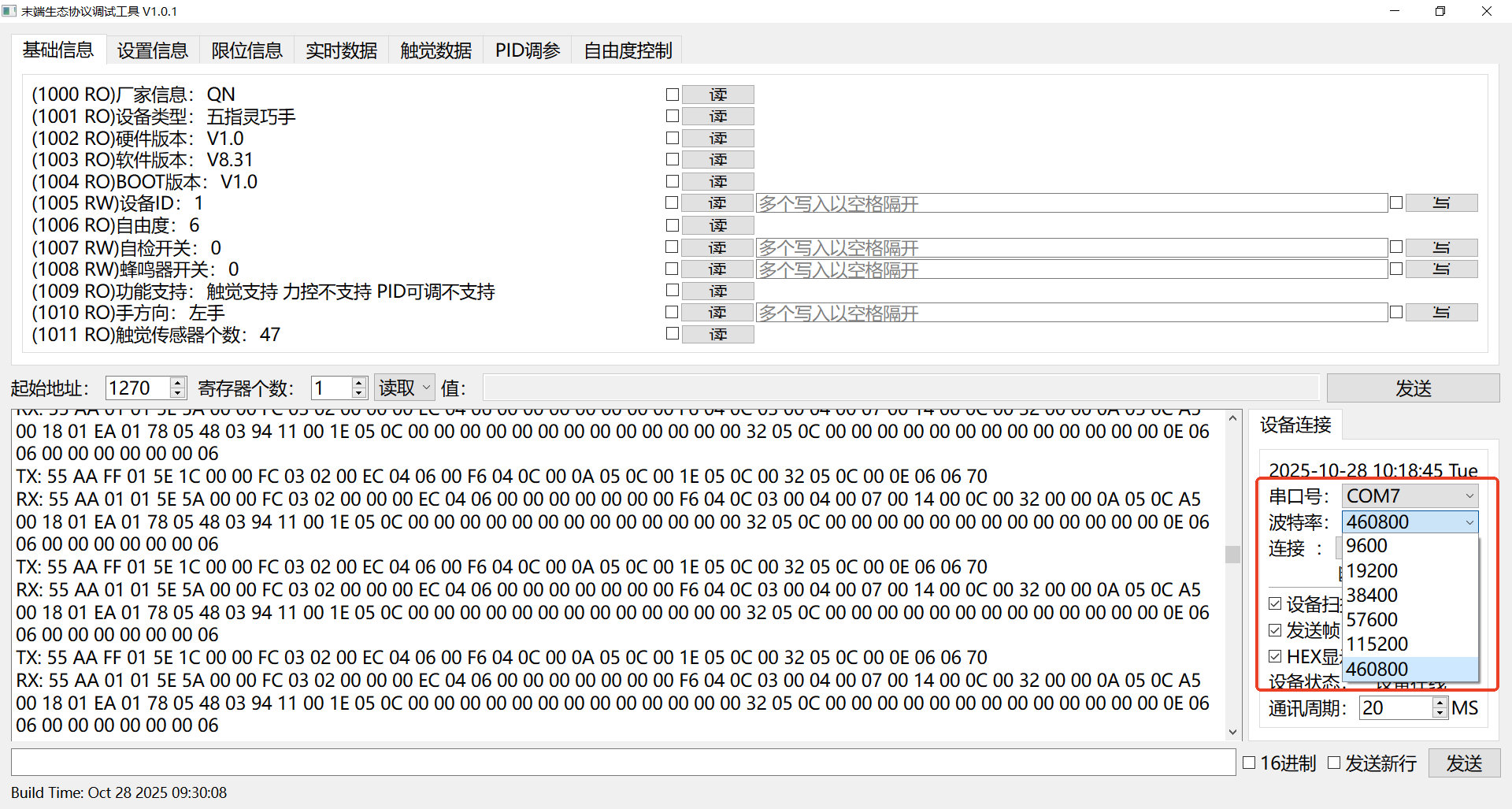
波特率配置
支持从预置值(如 9600、19200、38400、57600、115200、460800)中快速选择,也支持手动输入自定义值(最高支持460800波特率)。
注意
该参数需根据灵巧手硬件规格进行匹配设置。
以下图示可供具体操作时参考:
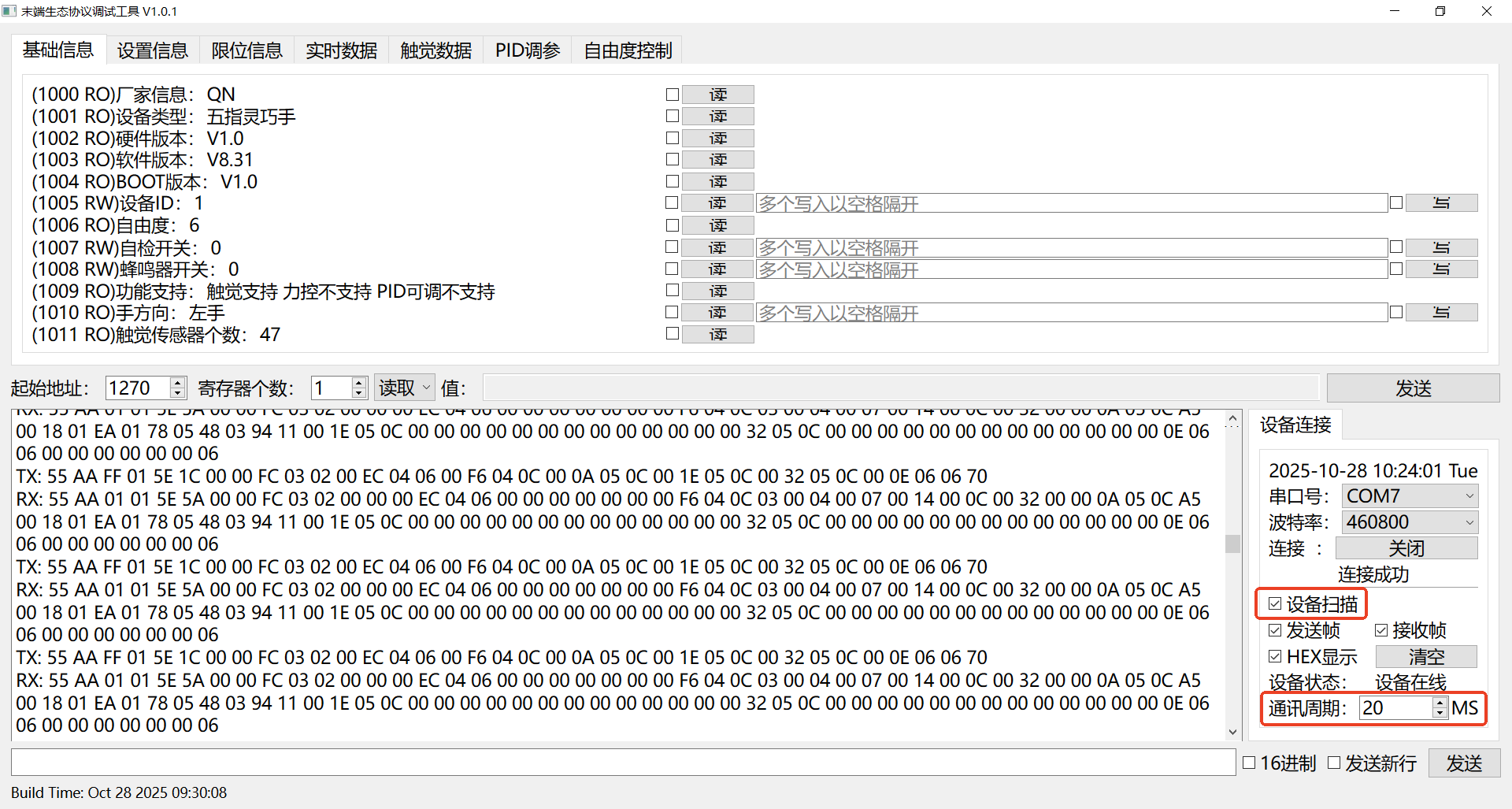
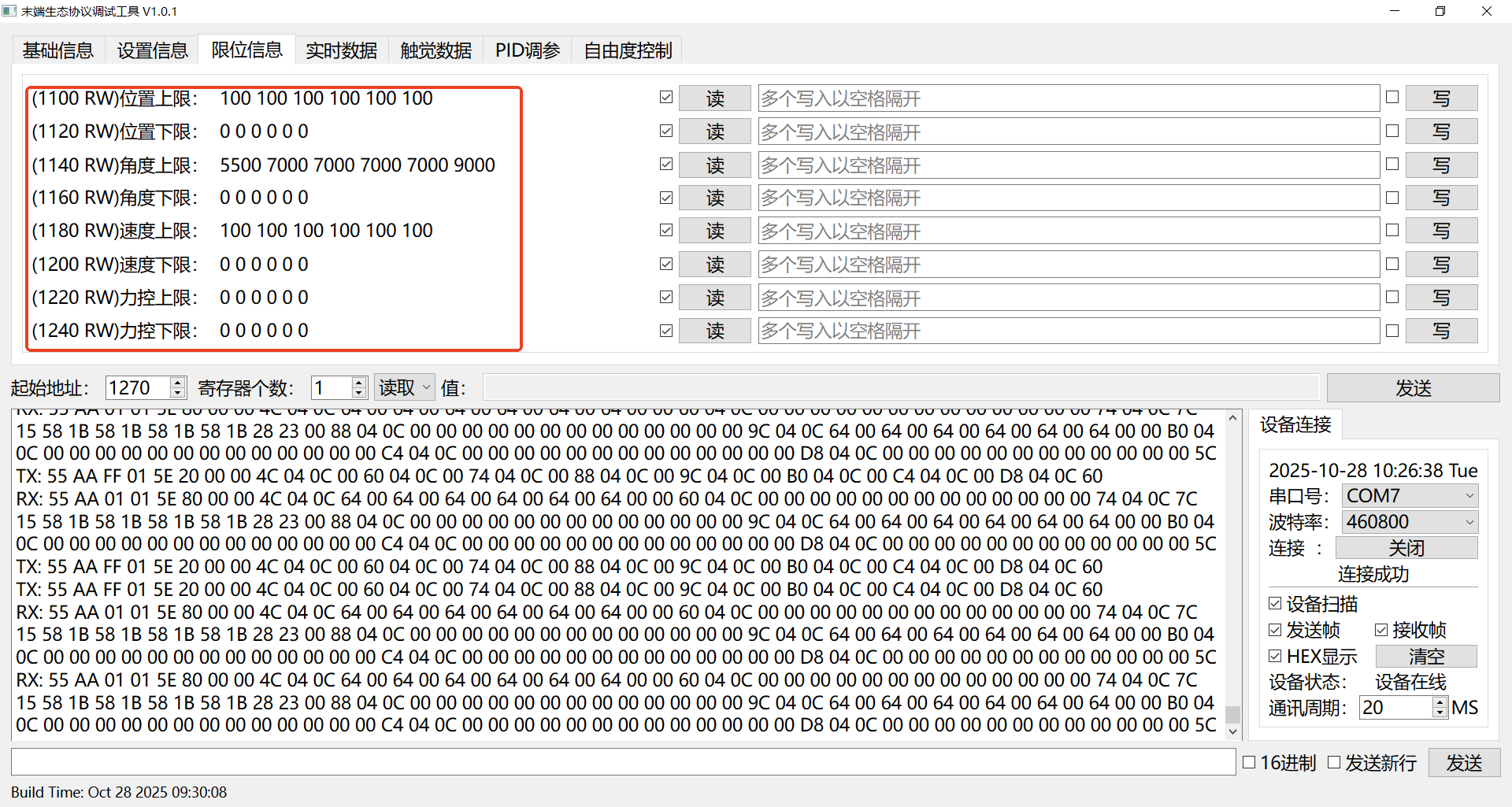
扫描设备
此功能用于读取设备的基础信息与全部限位信息。
扫描流程:
读取基本信息:
获取地址
1000-1011寄存器内的设备基础信息。读取限位信息:
获取包括位置、角度、速度、力矩在内的全部限位参数。
启动实时监控:
开始以
20ms为周期,持续读取设备的实时状态数据。
| 基础信息 | 限位信息 |
|---|---|
 |  |
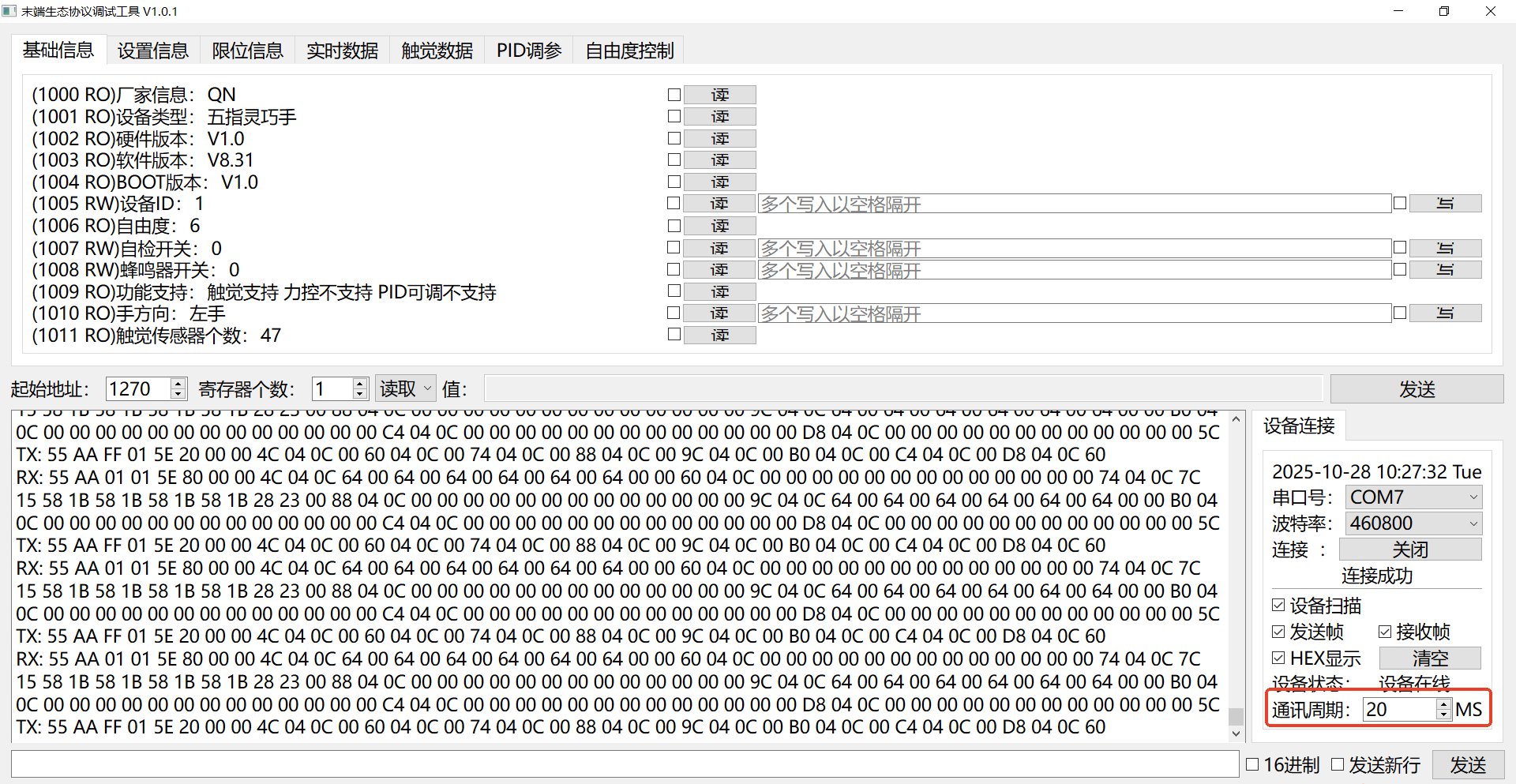
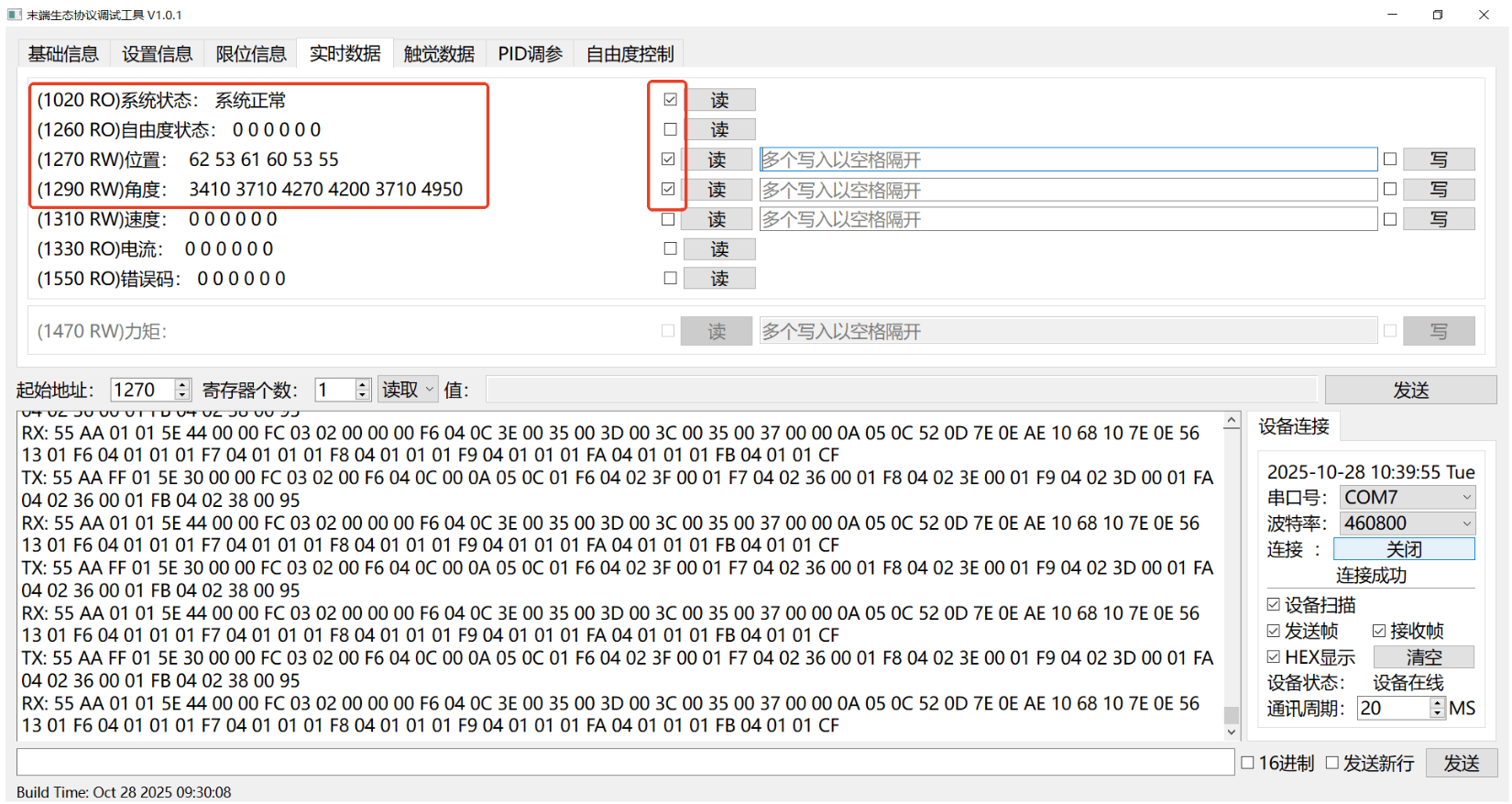
周期性读取寄存器
勾选目标寄存器对应的读取选项,并配置通讯周期后,系统将在每个通信周期自动向设备发送该寄存器的读取指令。
应用示例:如下图所示,系统被配置为每20ms周期性地读取一次位置、角度等寄存器数据,实现对设备运动状态的持续跟踪与可视化分析。
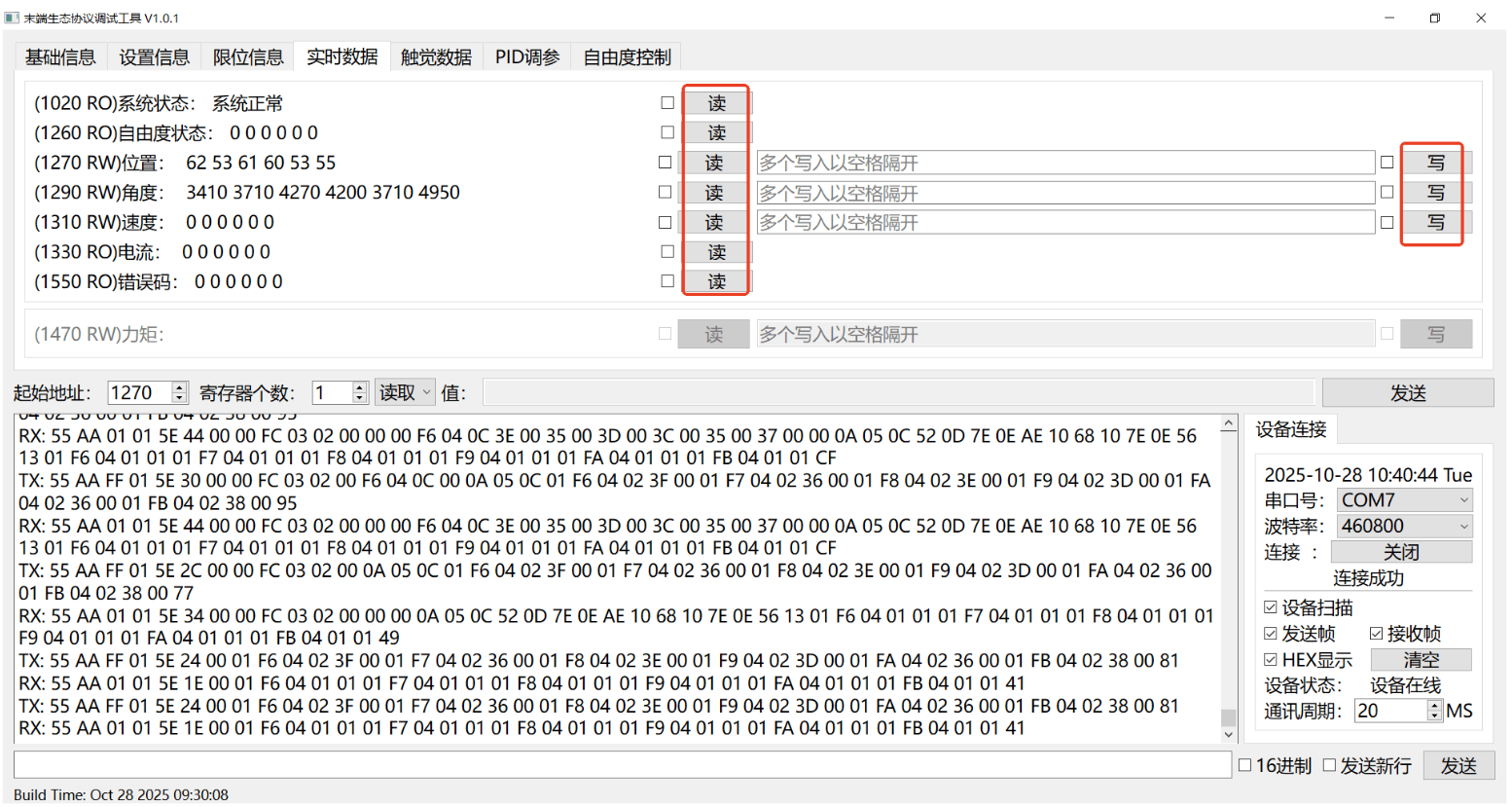
实时数据读取与写入
系统提供灵活的数据交互方式,以满足不同调试与控制需求:
单次操作:点击读或写按钮,立即执行一次相应的读取或写入命令。
周期操作:勾选对应复选框,系统将依据设定的通信周期,自动、循环地执行读取或写入指令,适用于需要持续监控或控制的场景。
寄存器写入与读取
单个寄存器的写入与读取
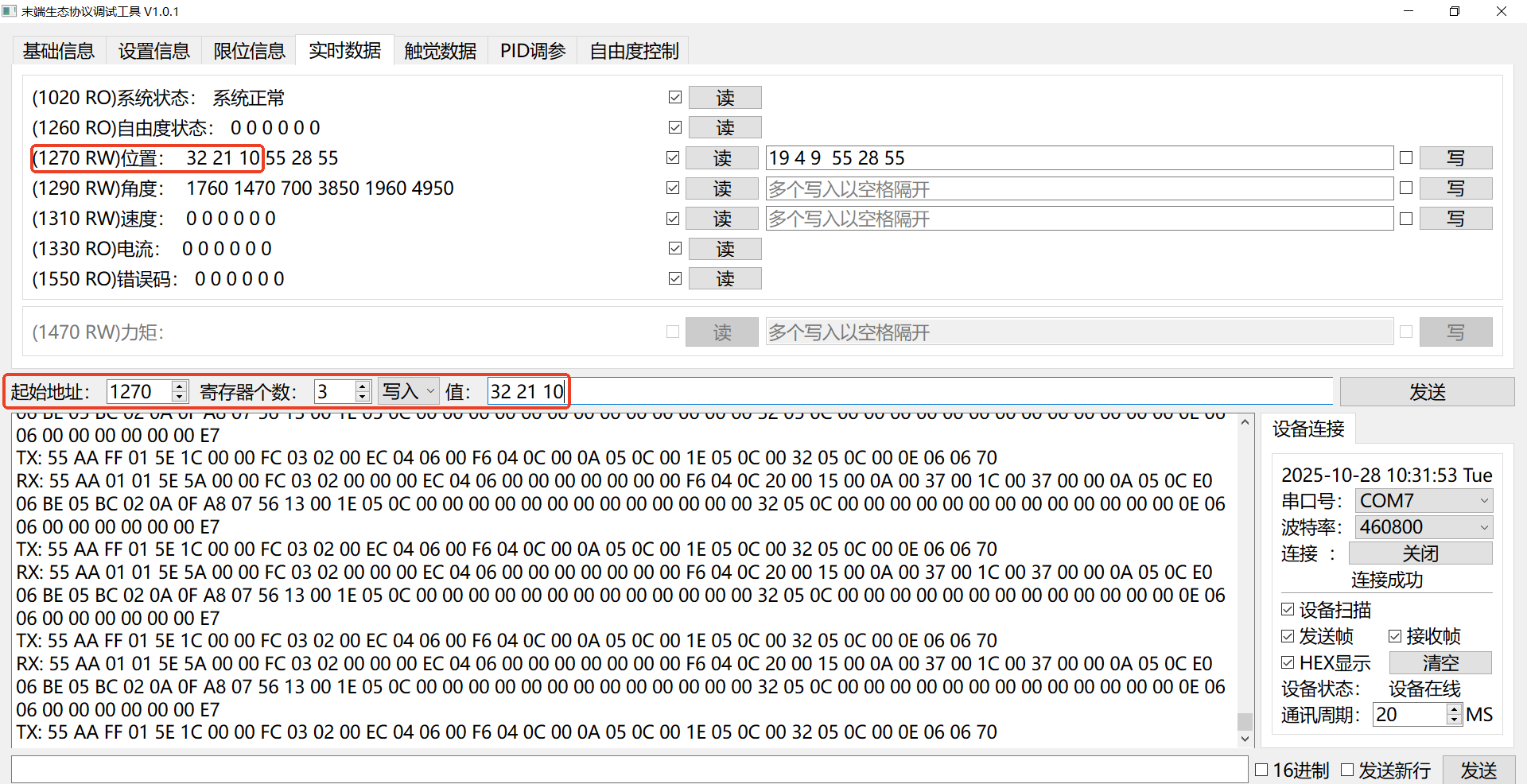
写入:
如进行末端设备位置控制时,可以直接写入⾃由度1的位置信息;
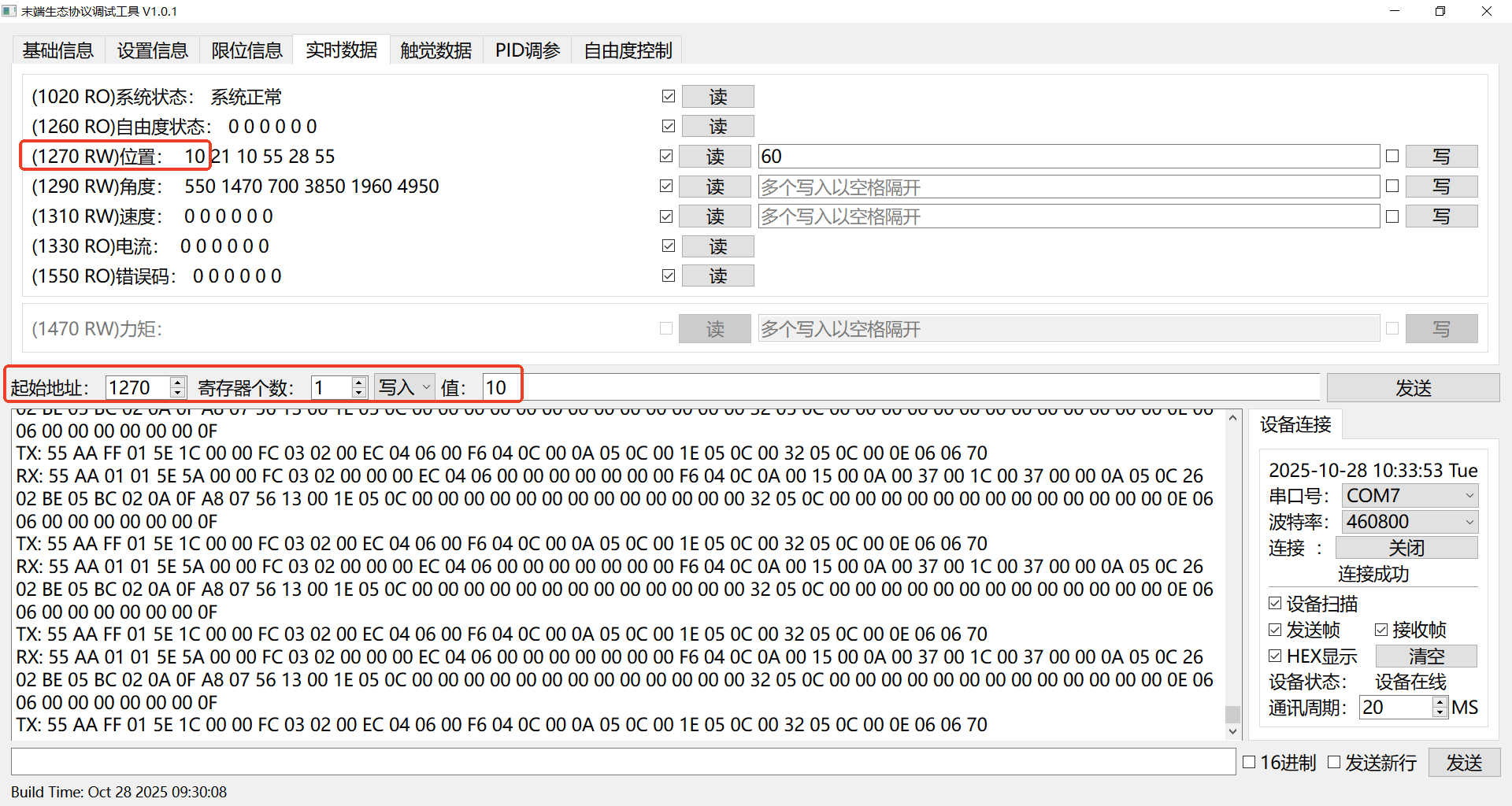
也可以利用地址信息,对指定的寄存器进行写入。
直接写入 利用地址信息写入 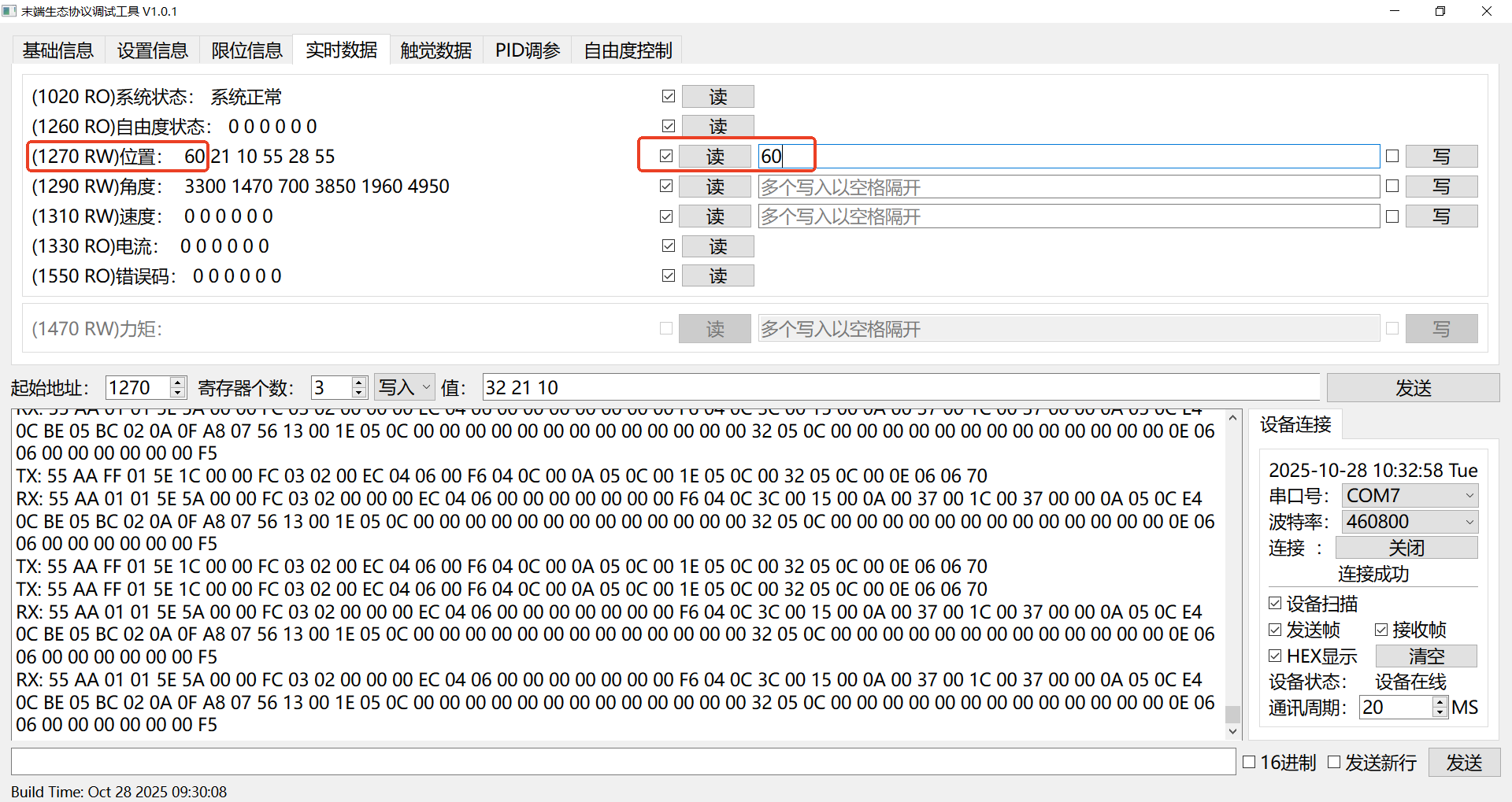
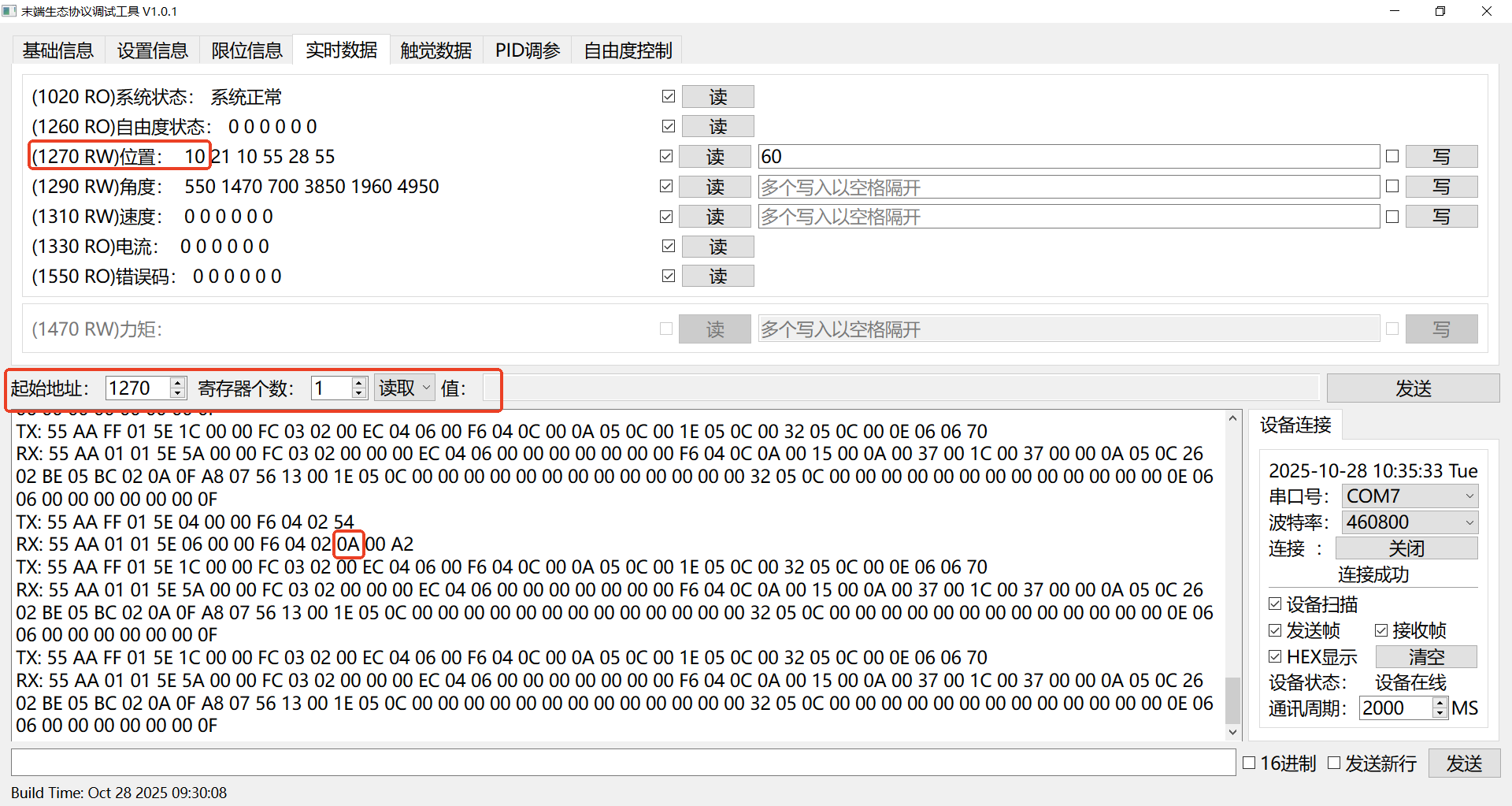
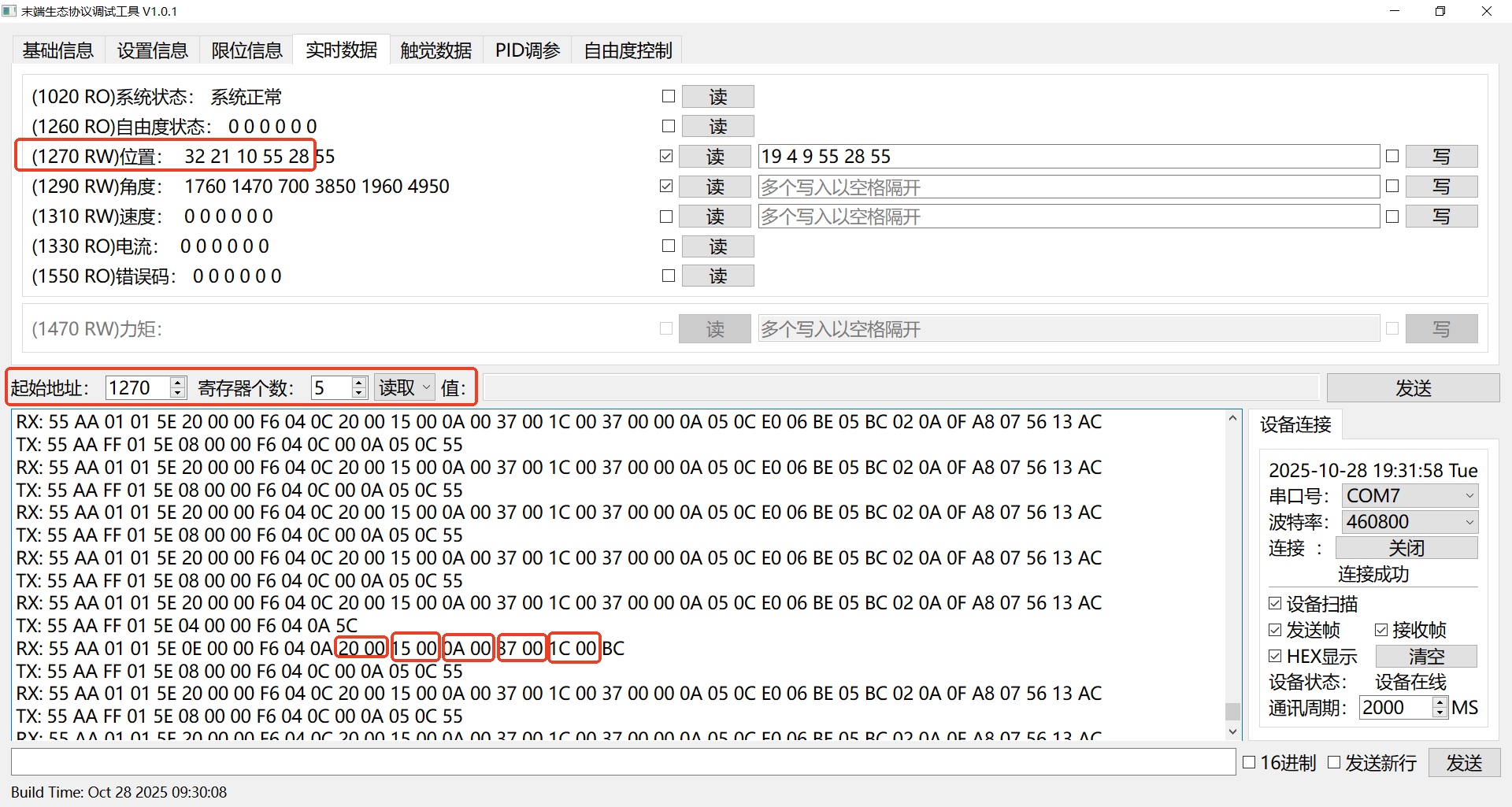
读取:
连续寄存器的写入与读取
批量写入
支持一次性向多个连续寄存器写入数据。数据格式:多个十进制数值之间用空格隔开。应用示例:在控制末端设备位姿时,可一次性写入全部6个自由度的目标位置数据,例如:
19 4 9 55 28 55。也可通过指定起始地址,对后续连续的多个寄存器进行批量写入。
一次性向多个连续寄存器写入数据 通过指定起始地址写入 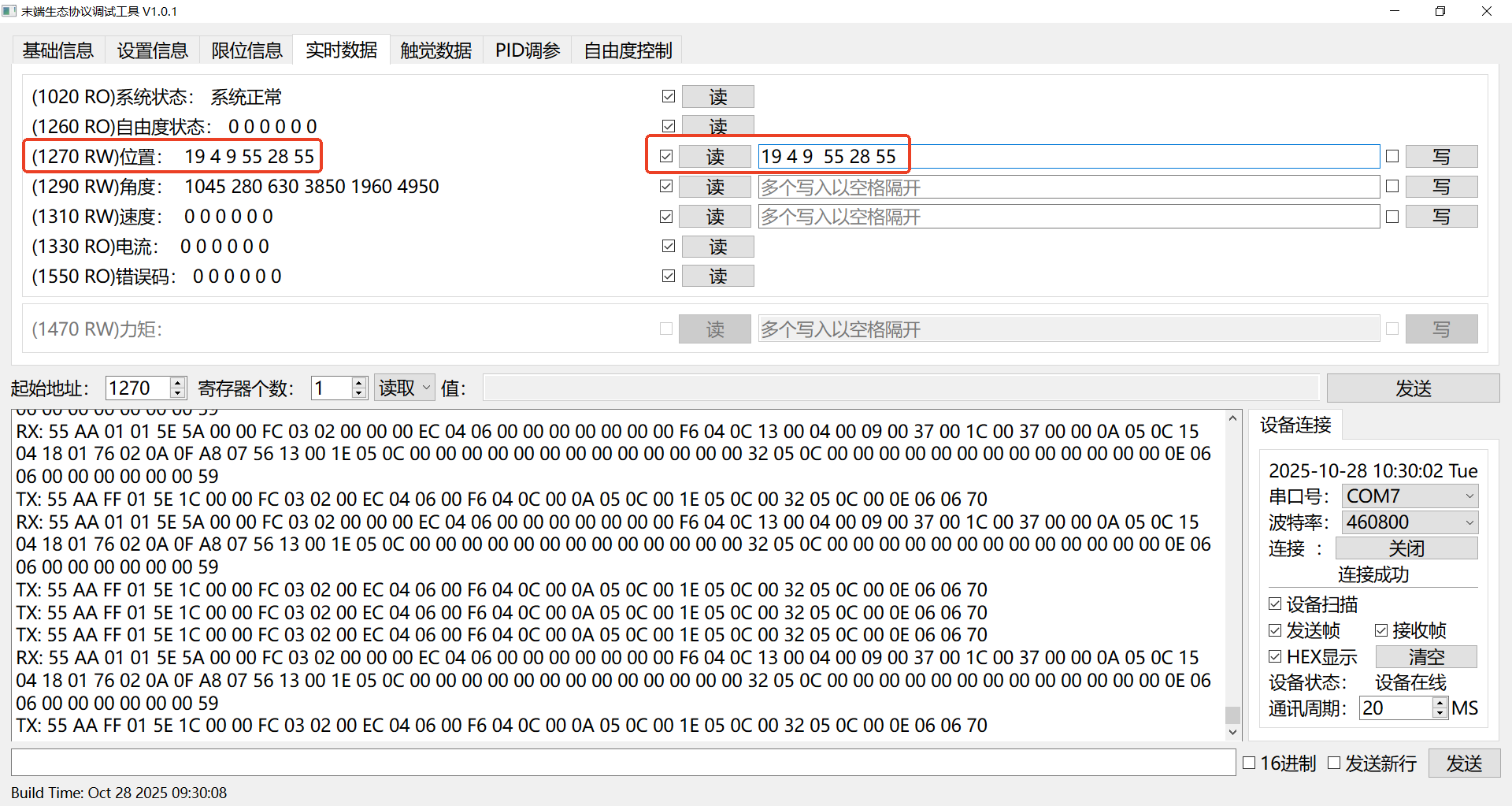
读取
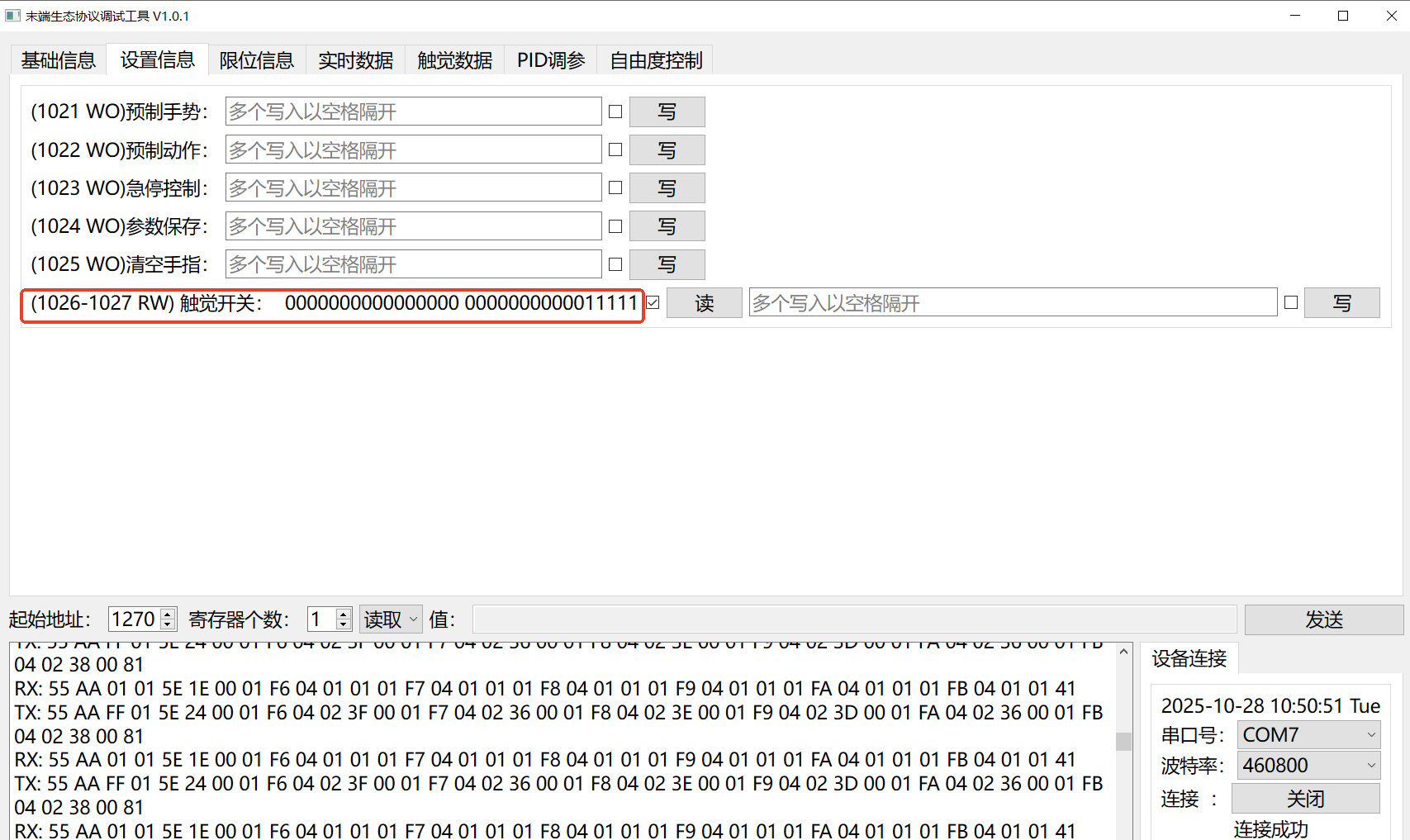
触觉信息读取
- 开关关闭:无法读取触觉信息。
| 开关关闭 | 无法读取触觉数据 |
|---|---|
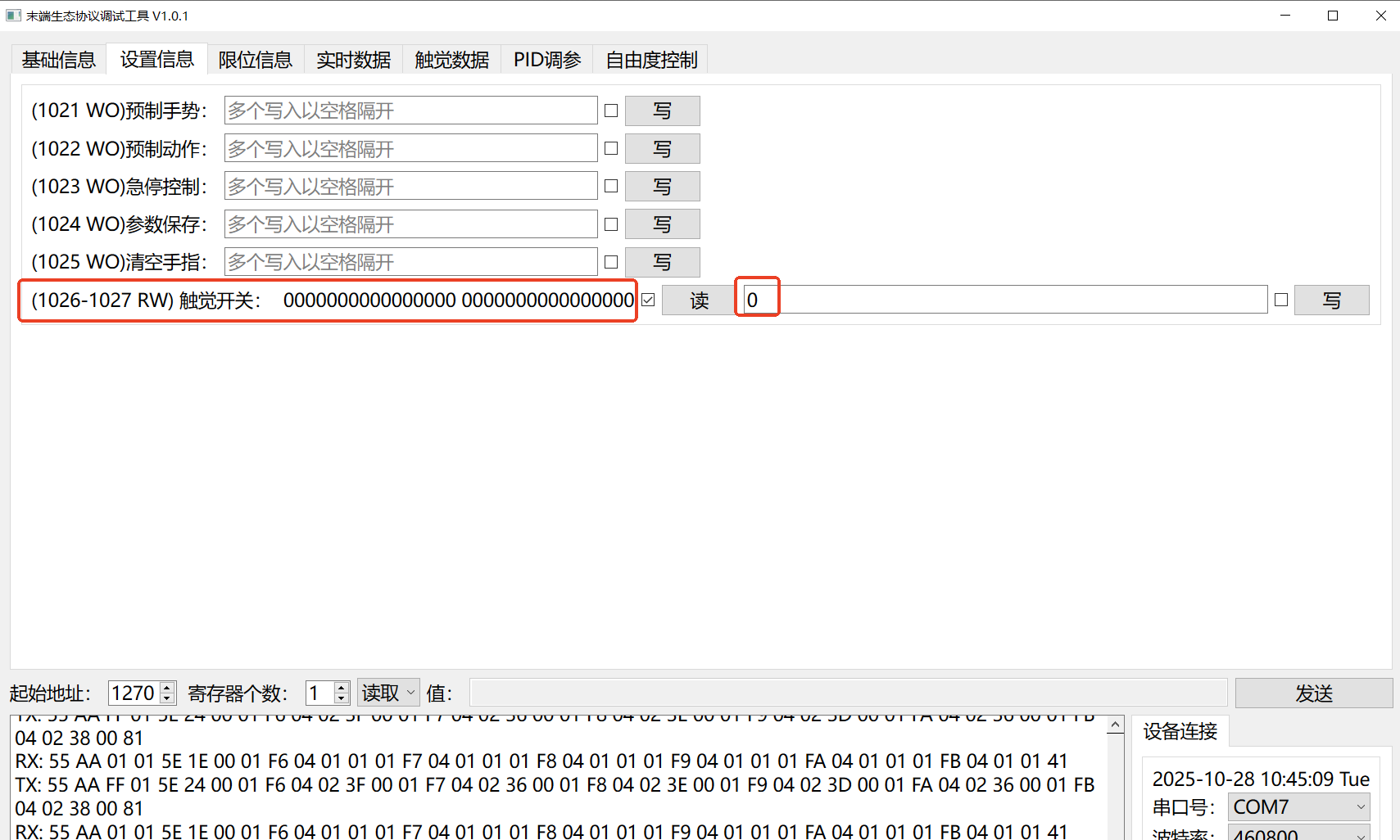 | 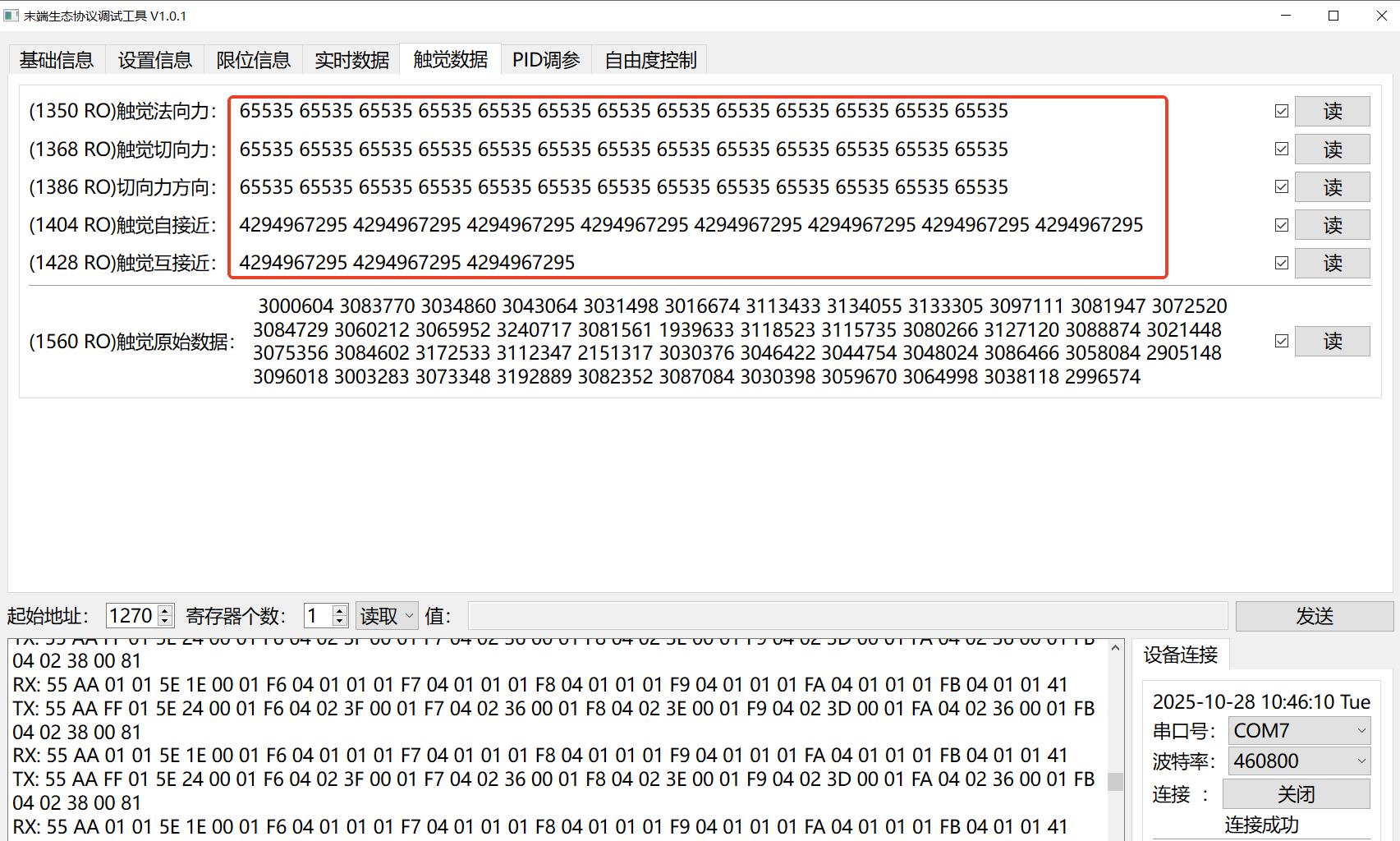 |
- 开关开启:系统将能够读取并显示触觉传感器数据。
| 开关开启 | 成功读取触觉数据 |
|---|---|
 | 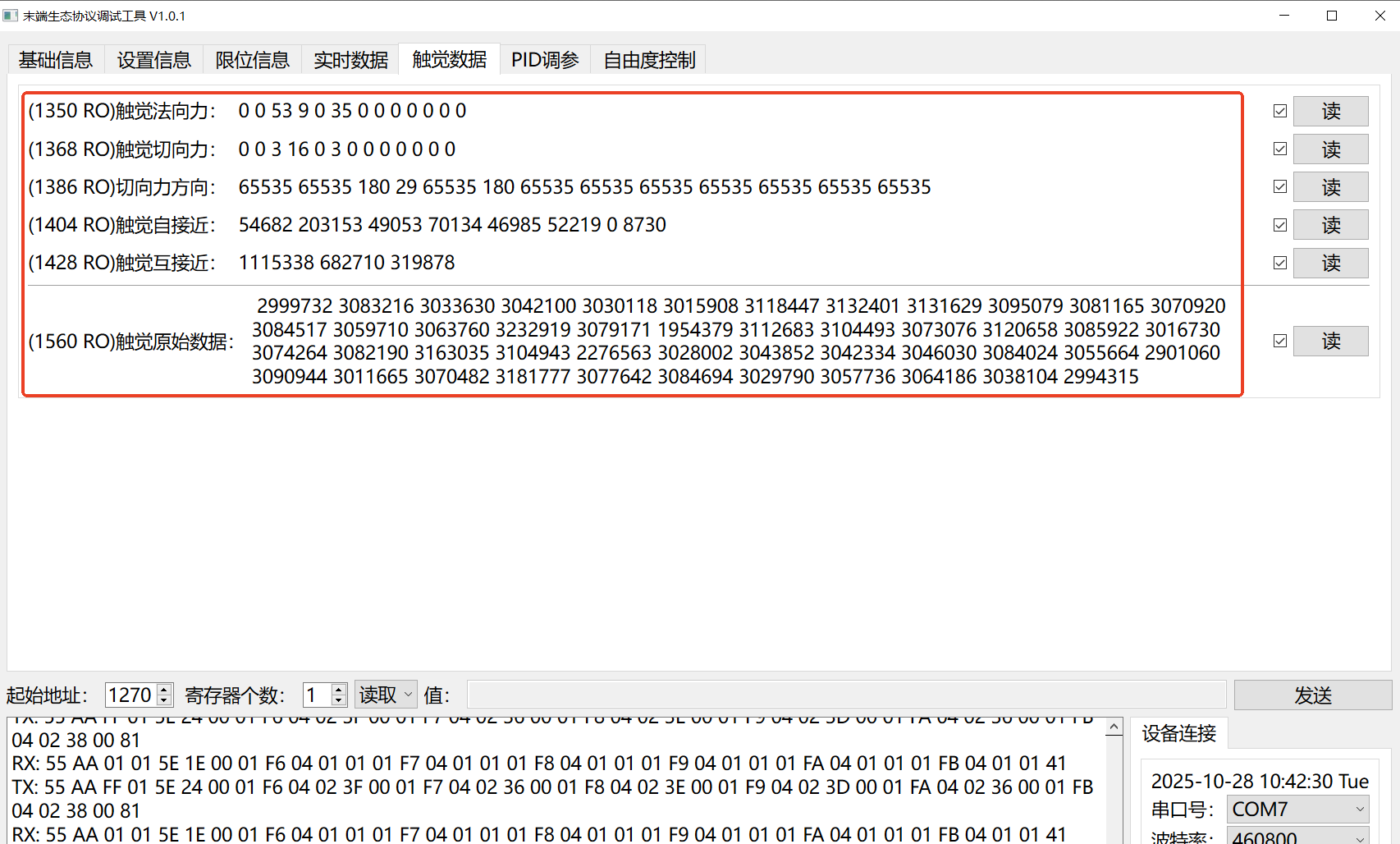 |
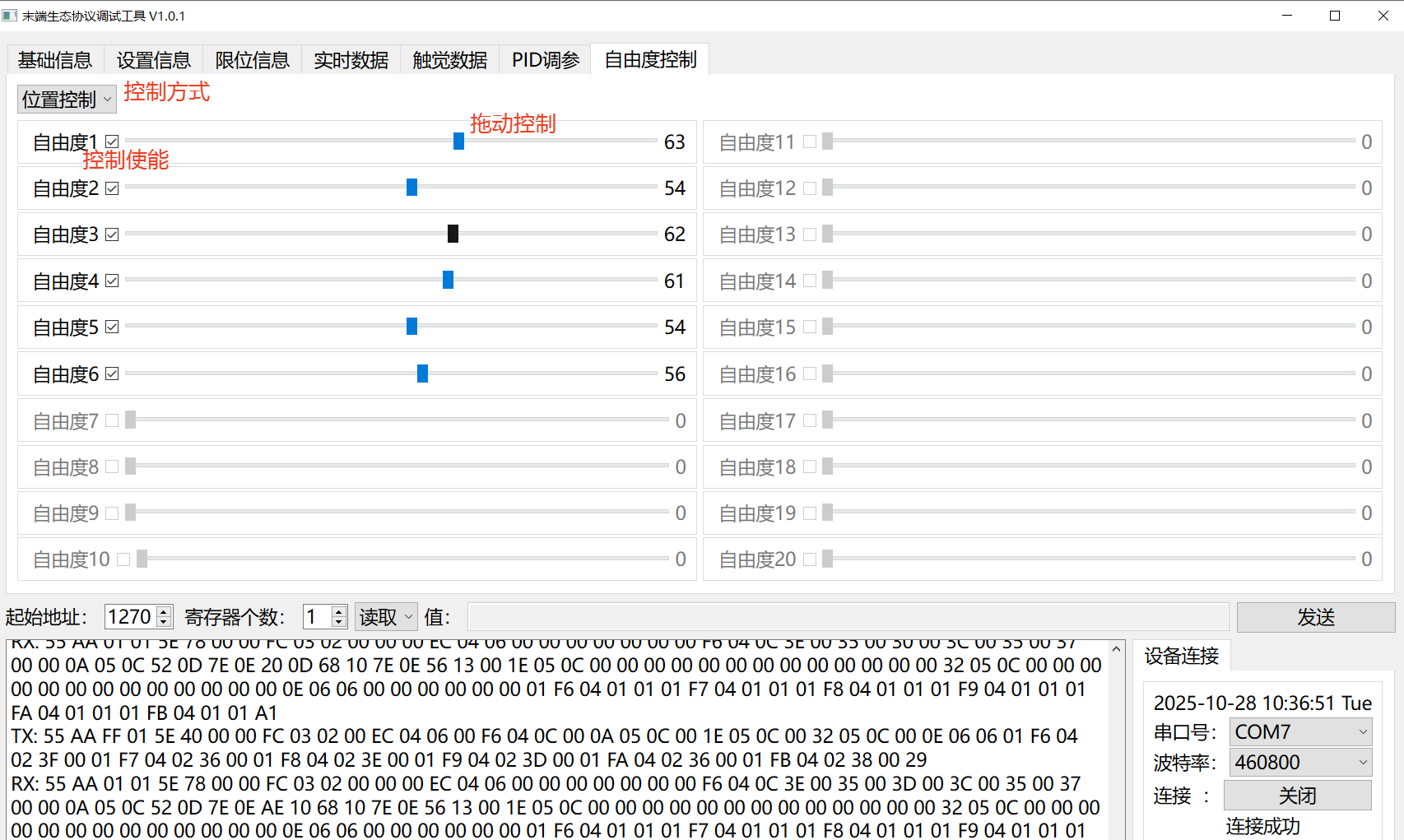
自由度控制
选择控制模式后,可根据末端设备支持的自由度数量,通过拖动进度条对各个自由度进行独立的自由态控制。