入门指南:
实时导航 设备连接类
当硬件状态正常后,才可进行设备连接。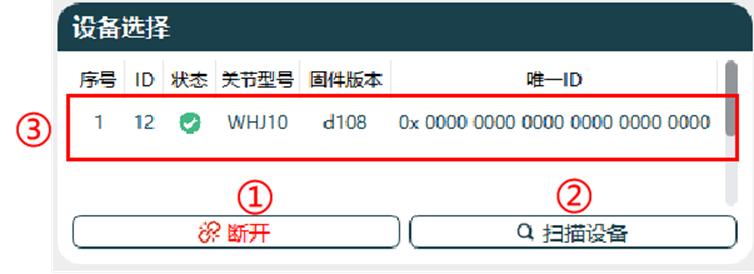
设备选择按钮功能,如下表所示。
| 序号 | 名称 |
|---|---|
| 1 | Can卡连接 |
| 2 | 关节设备扫描 |
| 3 | 关节基本信息 |
CAN卡连接
连接:
当硬件设备连接状态正常时,请点击功能按钮
Can卡连接,弹出参数设置页面。支持设置
协议、通道、仲裁域和数据域。
不同协议配置方案如下:协议 通道 仲裁域 数据域 CANFD_ZLG/CANFD_HK 0 1Mbps 5Mbps CANOPEN_ZLG/CANOPEN_HK 0 1Mbps 默认1Mbps,支持500HZ、250HZ可调整 对应协议说明如下,不同协议需对应关节不同版本,具体版本情况请联系我司技术支持。
协议 说明 CANFD_ZLG 对接周立功品牌的CANFD协议 CANOPEN_ZLG 对接周立功品牌的CANOPEN协议 CANFD_HK 对接虹科品牌的CANFD协议 CANOPEN_HK 对接虹科品牌的CANOPEN协议 CAN卡通讯配置完成后,点击
确认连接CAN卡设备,在上位机提示“连接成功”,功能按钮变更为断开。
断开: 点击功能按钮
断开,此时上位机提示“设备已断开”,功能按钮变更为Can卡连接。连接 断开 

扫描设备
设备连接成功后,点击扫描设备开始扫描关节,实时扫描已通讯关节,当扫描完成后,关节设备相关信息将展示在设备对话框中。
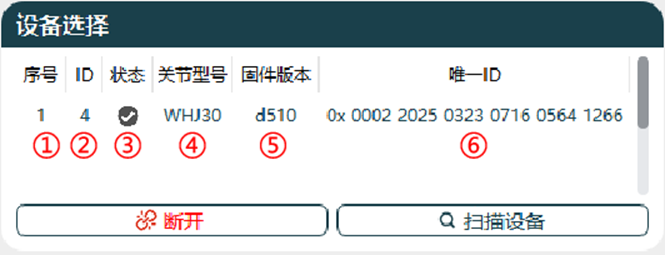
设备信息显示说明如下:
| 序号 | 名称 | 说明 |
|---|---|---|
| 1 | 连接设备序号 | 当存在多关节连接时,序号根据关节数量进行递增。 |
| 2 | 关节ID | 根据实时扫描,显示已设置的关节ID号。 |
| 3 | 使能状态 | 根据实时扫描,显示当前关节使能状态,并根据关节状态使用不同颜色进行显示。 掉使能:  上使能:  |
| 4 | 关节型号 | 根据实时扫描,显示当前关节型号。 |
| 5 | 固件版本 | 根据实时扫描,显示当前关节固件版本型号。 |
| 6 | 全球唯一ID | 根据实时扫描,显示当前关节唯一ID,此ID出厂后不可进行更改。 |
数据显示
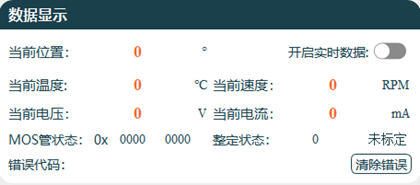
当上位机连接正常时,可查看当前选中关节基础信息。

数据显示各区域说明如下:
| 序号 | 名称 |
|---|---|
| 1 | 当前关节所在角度位置 |
| 2 | 关节实时数据显示的开启与关闭 |
| 3 | 关节内部当前温度 |
| 4 | 关节当前速度 |
| 5 | 关节当前检测电压 |
| 6 | 关节当前损耗电流 |
| 7 | 关节当前MOS管状态 |
| 8 | 关节当前整定标定状态 |
| 9 | 关节当前错误状态显示 |
| 10 | 清除当前错误状态 |
开启实时数据
实时数据默认处于关闭状态。如需查看关节实时信息,请点击开启实时数据,开启实时上传当前关节数据信息功能,如下图所示。

清除错误
当关节出现异常时,错误代码展示当前错误问题描述,同时关节状态栏掉使能。
排查关节错误原因,并完成解决。
点击
清除错误清除错误信息。点击
上使能使关节状态上使能。
运动配置
关节控制操作,可进行控制关节状态以及控制关节运动等相关设置。
关节状态设置
关节状态设置功能按钮,可对关节进行相应操作。
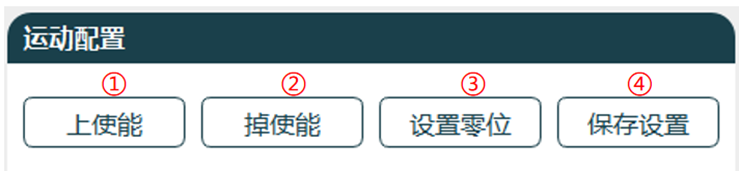
各功能说明如下:
| 序号 | 名称 | 说明 |
|---|---|---|
| 1 | 关节上使能 | 连接设备后,关节默认为上使能状态,此时才可对关节进行运动控制,掉使能时上位机对关节无法进行运动控制。 |
| 2 | 关节掉使能 | 当设备处于上使能状态,只能通过软件控制关节。如需手动控制关节,请先进行掉使能操作,当处于掉使能状态时,才能人为正常转动关节,此时设备栏状态为灰色。 |
| 3 | 关节设置零位 | 点击设置零位按钮后,关节当前位置设置为零位,角度为0度,设置完成后需保存设置才能生效。 |
| 4 | 保存参数设置 | 关节内部一切参数的设置,均需要点击保存设置按钮。若不保存设置,关节断电重启后,关节参数将恢复之前的数据。 |
运动控制
可通过多种模式控制关节运动,支持对关节进行限位设置。

各区域功能说明:
| 序号 | 名称 |
|---|---|
| 1 | 运动模式 |
| 2 | 伺服模式 |
| 3 | 波形控制 |
| 4 | 开始结束清零设置 |
| 5 | 手动控制 |
| 6 | 校准和急停 |
各区域/按键说明如下:
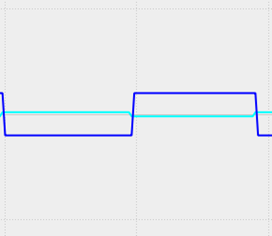
运动模式: 运动模式支持方波、正弦波、手动,可根据需求进行设置。
波形模式选项 方波 正弦波 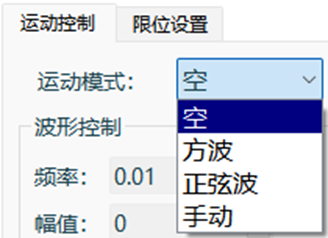
伺服模式: 伺服模式支持目标电流、目标速度、目标位置和测试模式,可根据需求进行设置。
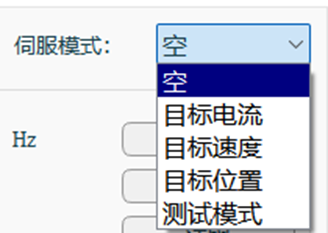
注意
测试模式仅限于在空载的情况下测试使用(如果带负载,到达限位时惯性较大,长时间使用有损坏关节的风险),在该模式下,仅支持使用手动运动模式,支持转速手动调整。在使用该模式时,建议将关节限位调整为最大(-214748~214748),关节可以在设定的最大位置限位、最小位置限位之间循环往复运动。
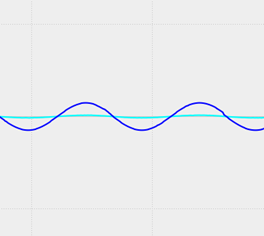
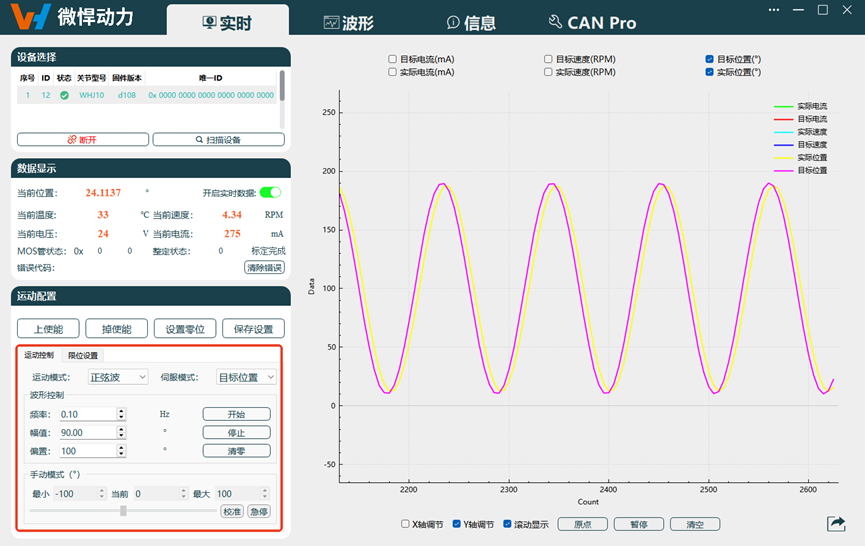
波形控制: 支持设置波形频率及波形幅值,控制关节速度、角度大小等参数。可通过频率、幅值、偏置参数进行配置。
下图以位置伺服、正弦波运动模式为例:频率设置为0.1HZ,则运动1个正弦波周期为10S;
幅值设置为90,对应正弦波幅值;
偏置设置为100,则正弦波平衡位置角度与y=0°偏差为100°。
手动控制: 手动控制为单独关节控制,根据伺服模式进行状态选择。
运动控制通过鼠标调整参数大小。
切换到手动模式后,需要先进行校准,运动自动调整至正常可控范围。
目标位置模式下,校准可将调整范围校准为±100°可调。
在目标速度或者目标电流模式下,正常操作情况下建议手动调整滑块至速度为0。
如果发生异常危险情况,可点击
急停按钮让关节停止运动。
限位设置
限位设置: 可设置关节最大限位角度与最小限位角度。设置完成后,点击保存设置保存至关节内部,并重启关节后生效。最小限位最小可设置为-214748°,最大限位最大可设置为214748°。

实时波形
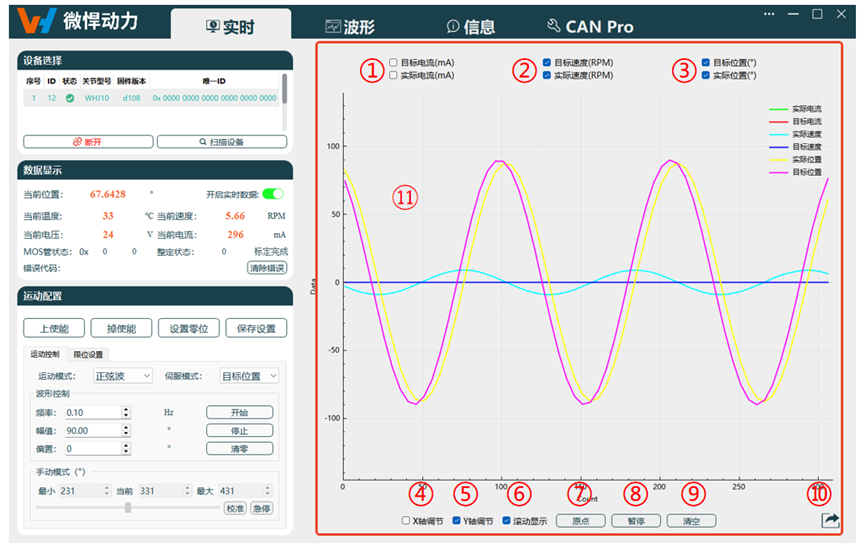
当前关节数据通过波形显示,包括实际电流、目标电流、实时速度、目标速度、实时位置、目标位置,并支持数据导出功能。
各功能区域说明如下:
| 序号 | 名称 |
|---|---|
| 1 | 电流波形显示选择框 |
| 2 | 速度波形显示选择框 |
| 3 | 位置波形显示选择框 |
| 4 | X轴单独调节 |
| 5 | Y轴单独调节 |
| 6 | 滚动显示 |
| 7 | 波形原点 |
| 8 | 波形开始/暂停 |
| 9 | 波形清空 |
| 10 | 数据导出 |
| 11 | 波形显示 |
各区域/按键说明如下:
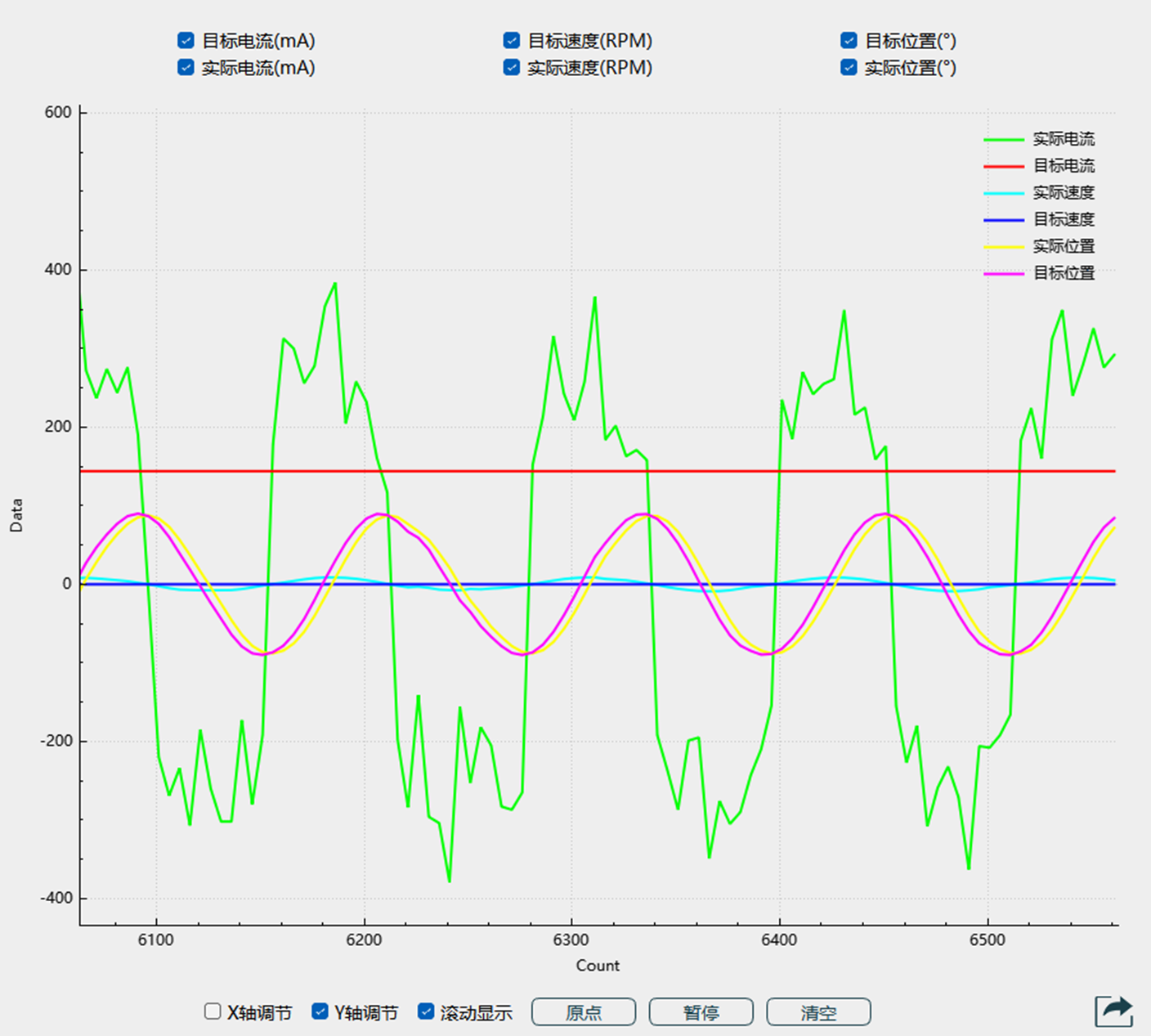
波形显示选项: 当需要查看相关电流、速度、位置波形时,勾选对应选项,并点击
开始后,波形输出在图框中。
功能按钮: 针对波形进行对应控制及查看。
X轴调节: 当勾选时,可通过调整鼠标滚轮调节波形x轴比例。去除勾选后,无法调节波形比例。
Y轴调节: 当勾选时,可通过调整鼠标滚轮调节波形y轴比例。去除勾选后,无法调节波形比例。
滚动显示: 当勾选时,波形实时滚动,当去除勾选时,波形固定在此页面,可以拉动两轴查看数据。
原点: 当停止滚动显示时,点击功能按钮
原点后,波形显示从x轴0位开始。开始: 当点击
开始后,根据勾选的波形开始显示,按钮变为暂停。如需停止,可点击暂停停止波形打印。开始按钮 暂停按钮 
清空: 点击功能按钮
清空后,清空打印在上位机上的波形。数据导出:
导出类型:图片导出、文档导出。
导出目标:实时波形图、电流波形图、位置波形图、速度波形图、力矩波形图。
图片导出可选择文件存储地址及文件名称,图片格式默认png,如下图所示。
文档导出文件名称及文件地址无法选择,导出时提示
写入文件成功。文件格式默认固定为txt格式,文件路径为上位机data文件内,如下图所示。