入门指南:
环境准备 硬件环境配置
接线说明
本关节外部接口三个接线端子,一个电磁锁头。
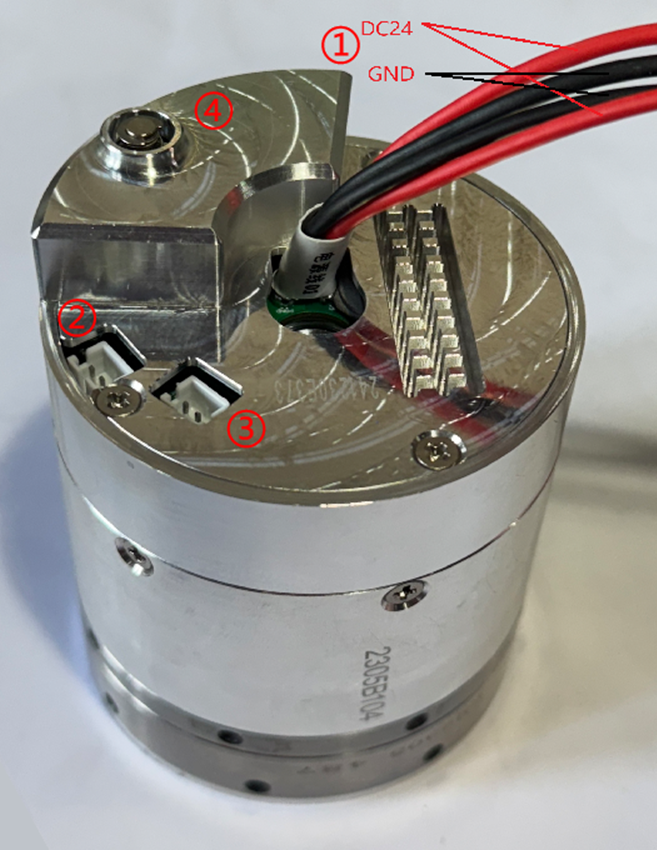
关节硬件说明,如下表所示。
| 序号 | 名称 |
|---|---|
| 1 | 输入 24V 直流电源 |
| 2 | CAN0 通讯接口 |
| 3 | CAN1 通讯接口 |
| 4 | 电磁锁(硬限位模块) |
输入电源
红&黑色线束为电源输入,红色为电源正极,黑色为电源 GND,关节外部电源输入为 24V 电源。
关节通讯
通信接口端子共有两对,分别为CAN0&CAN1,其中,蓝色线束为CANH,白色线束为CANL。
CAN 通讯设备配置
CAN转USB工具使用ZLG USBCANFD-100U-mini(选配),如下图所示。

点击驱动工具下载CAN转USB驱动工具。
将驱动工具软件包解压至本地,双击
USBCANFD_AllInOne_x86_x64_1.0.0.2.exe运行并完成安装驱动工具。确认测试用电脑是否已安装VC++环境,如果未安装,请联系技术支持获取驱动包并安装,否则无法通讯成功。
注意
- 为满足接口卡接入集成系统的需要,睿尔曼推出了统一的编程接口,同时支持CAN和CANFD。
- 除了简单易用的接口,还配以接口使用例程和接口使用说明。
- 依赖Microsoft Visual C++运行库版本(必须具备):2005、2008、2010、2012、2013。
- 连接运动前确认关节已固定牢靠。
- 如果发现打开设备失效,请根据软件结构,检查电脑里面的运行环境是否缺失。
单关节上位机简介
点击单关节上位机下载单关节上位机软件。
将软件包解压至本地,双击
WHJoint.exe运行单关节上位机工具。单关节上位机用于关节的设置和观测,用户可根据需要调整关节参数、查询关节驱动信息、设置和升级固件以及实时观测关节数据等操作。
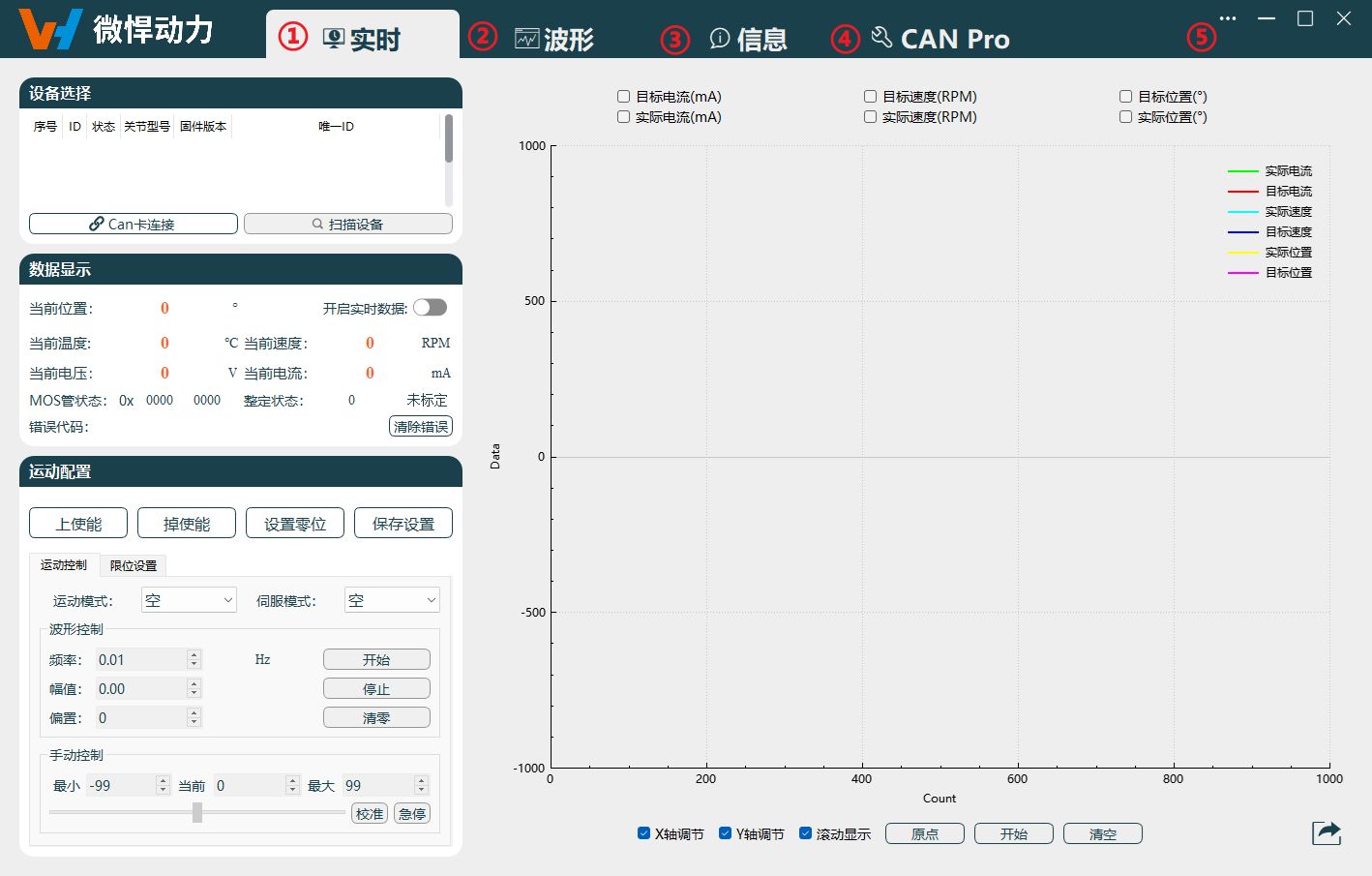
各功能区域名称:
| 序号 | 名称 |
|---|---|
| 1 | 实时导航 |
| 2 | 波形导航 |
| 3 | 信息导航 |
| 4 | CAN信息导航 |
| 5 | 功能菜单 |
下面将按照上表的顺序,依次对各区域/按键进行说明:
实时导航: 内部功能分类,设备连接类、数据实时显示类、运动配置类及实时波形类。
波形导航: 当前电流、速度、位置生成波形以便查看。
信息导航: 内部功能分类,驱动信息查询与设置、固件升级功能。
CAN信息导航:CAN指令收发实时显示。
功能菜单:支持进行中英文切换,如下图所示,在下拉菜单中选择
语言>中文/英文,切换至中文/英文界面。