入门指南:
使用案例 导出目标速度正弦波
准备工作
软件:在电脑中下载并安装好 WHJoint。
硬件:CAN 盒、24V电源、关节。
连接关节与软件
提醒
进行软件连接前,首先完成硬件的连接:打开WHJoint;can盒的usb口连接电脑,另一端连接到关节的can接口处(CANH与CANL中间要短接一个120Ω的电阻);关节连接24V开关电源。
进入软件配置页面,选择实时页签。
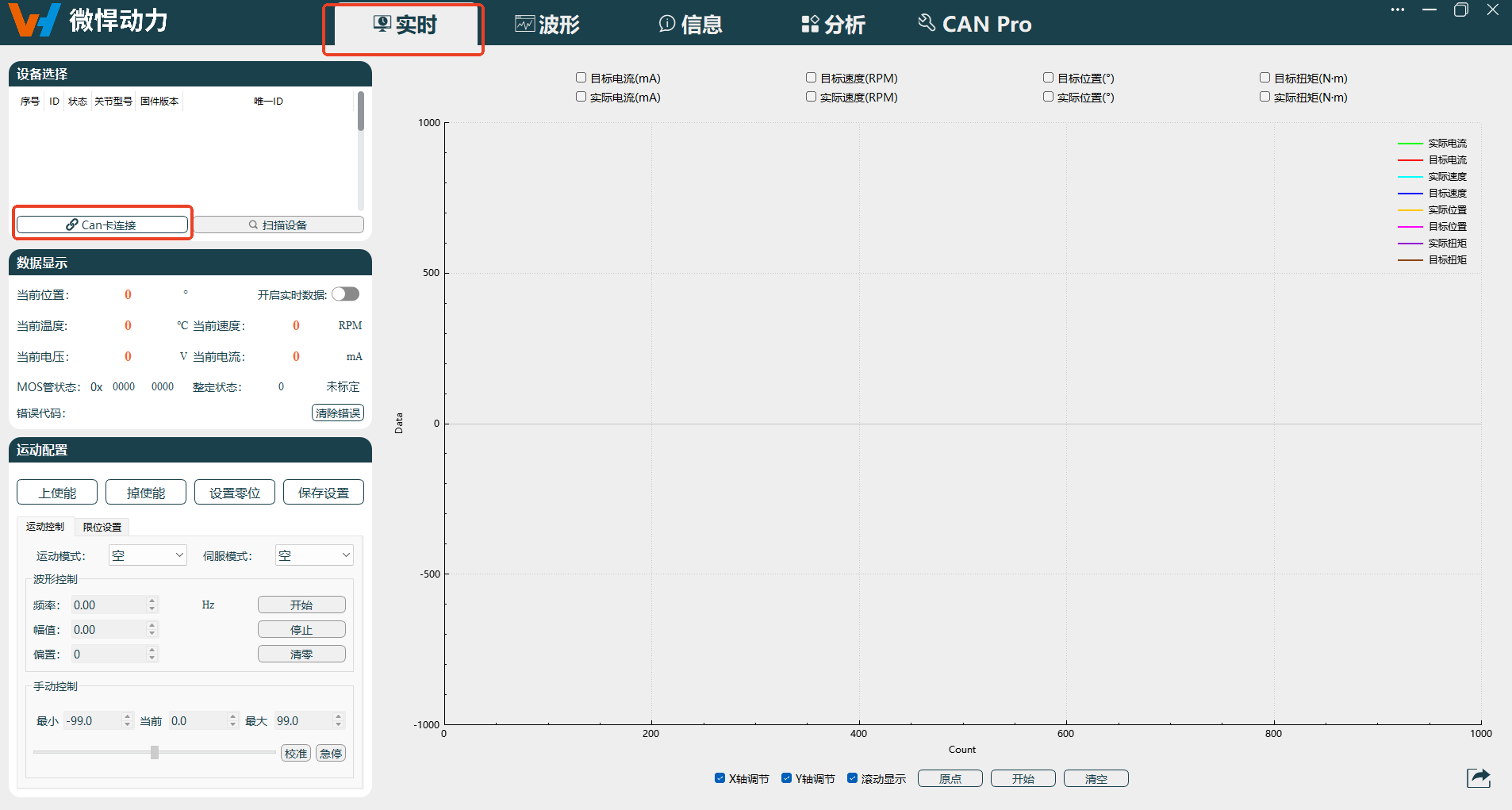
点击页面左上方设备选择模块中的Can卡连接。
打开参数设置窗口,并配置相关参数信息,配置完成后点击确认。

协议栏根据自己所用的Can卡来选择,详细说明如下:
协议 说明 CANFD_ZLG 对接周立功品牌的CANFD协议。 CANOPEN_ZLG 对接周立功品牌的CANOPEN协议。 CANFD_HK 对接虹科品牌的CANFD协议。 CANOPEN_HK 对接虹科品牌的CANOPEN协议。 通道栏选0。
仲裁域栏选1Mbps(目前关节仲裁域只支持1Mbps)。
数据域栏选5Mpbs(目前关节数据域只支持5Mbps)。
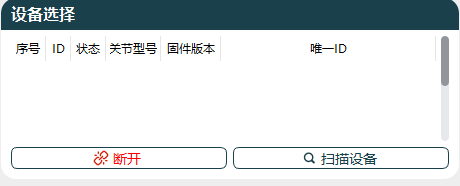
确认连接状态:查看设备选择模块,左下角Can卡连接变成断开字样,则说明CAN卡和电脑连接成功。
进行关节通电。
点击扫描设备,设备选择模块中出现所连接的关节信息。
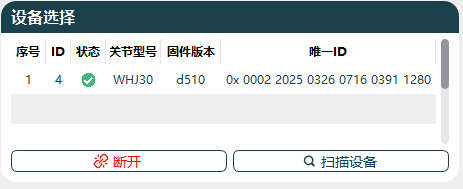
图中关节信息为:
- 序号:设备序号,当存在多关节连接时,序号根据关节数量进行递增。
- ID:关节ID,根据实时扫描,显示已设置的关节ID号。
- 状态:使能状态,根据实时扫描,显示当前关节使能状态,并根据关节状态使用不同颜色进行显示。
掉使能 上使能 

- 关节型号:根据实时扫描,显示当前关节型号。
- 固件版本:根据实时扫描,显示当前关节固件版本型号。
- 唯一ID: 根据实时扫描,显示当前关节唯一ID,此ID出厂后不可更改。
开启实时数据按钮
关节连接成功后,需打开开启实时数据按钮,才能查看关节实时数据信息。
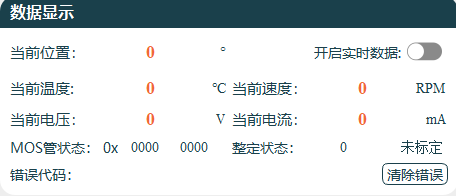

| 序号 | 名称 |
|---|---|
| 1 | 当前关节所在角度位置。 |
| 2 | 关节实时数据显示的开启与关闭。 |
| 3 | 关节内部当前温度(不得超过 90℃)。 |
| 4 | 关节当前速度。 |
| 5 | 关节当前检测电压。 |
| 6 | 关节当前损耗电流。 |
| 7 | 关节当前 MOS 管状态。 |
| 8 | 关节当前整定标定状态。 |
| 9 | 关节当前错误状态显示。 |
| 10 | 清除当前错误状态。 |
配置运动信息
注意
在正弦波和方波运动之前,一定要设置好限位,否则会出现关节目标位置超限报警。
限位设置:在运动配置模块,点击限位设置,并配置限位参数信息。

- 配置最小限位和最大限位:±360仅供参考,需根据关节的实际运用场景进行设置。最小限位可设置为-214748°,最大限位可设置为214748°。
- 配置完成后,点击保存设置。
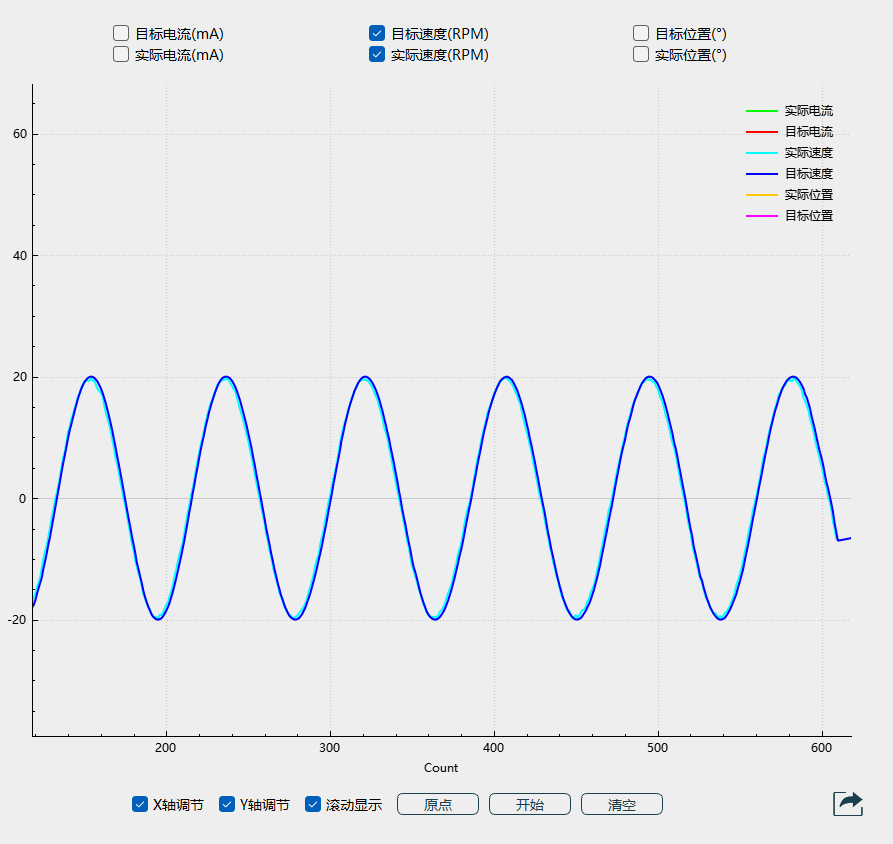
运动控制:在运动配置模块,点击运动控制,并配置运动参数信息。

- 运动模式:配置为正弦波。
- 伺服模式:根据需求进行配置,以目标速度为例。
- 波形控制:可通过频率、幅值、偏置等参数配置,控制关节速度、角度大小等。以速度伺服、正弦波运动模式为例进行配置:
- 频率设置为0.2HZ,则运动1个正弦波周期为20S。
- 幅值设置为20,对应正弦波幅值。
- 偏置设置为100,则正弦波平衡位置角度与y=0°偏差为100°。
- 设置完成后点击开始,关节开始来回转动,点击停止关机停止转动。
查看与导出波形
按上述操作配置完成后,即可查看对应的波形图。
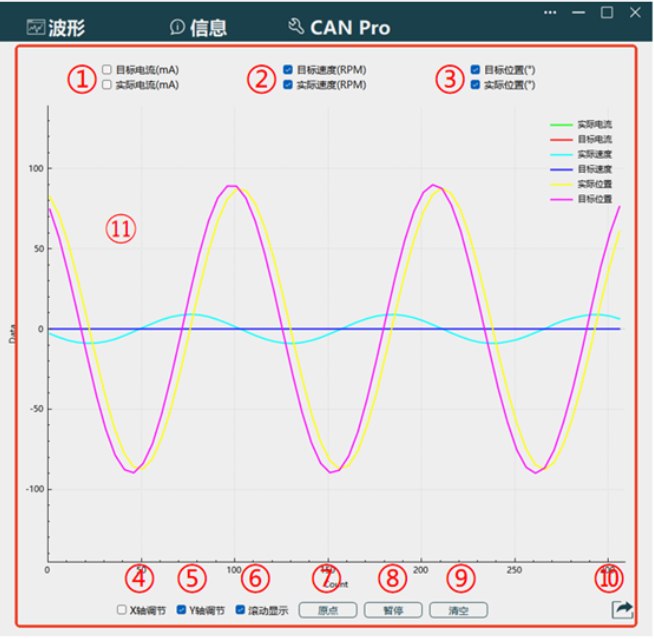
序号 名称 1 电流波形显示选择框。 2 速度波形显示选择框。 3 位置波形显示选择框。 4 X轴单独调节。 5 Y轴单独调节。 6 滚动显示。 7 波形原点。 8 波形开始/暂停。 9 波形清空。 10 数据导出。 11 波形显示。 当需要查看相关速度波形时,勾选对应选项,并点击开始,波形输出在图框中。
图中的信息框中,X轴为当前点的点数,Y为目标值。鼠标悬停在波形上,显示当前点的模糊坐标。
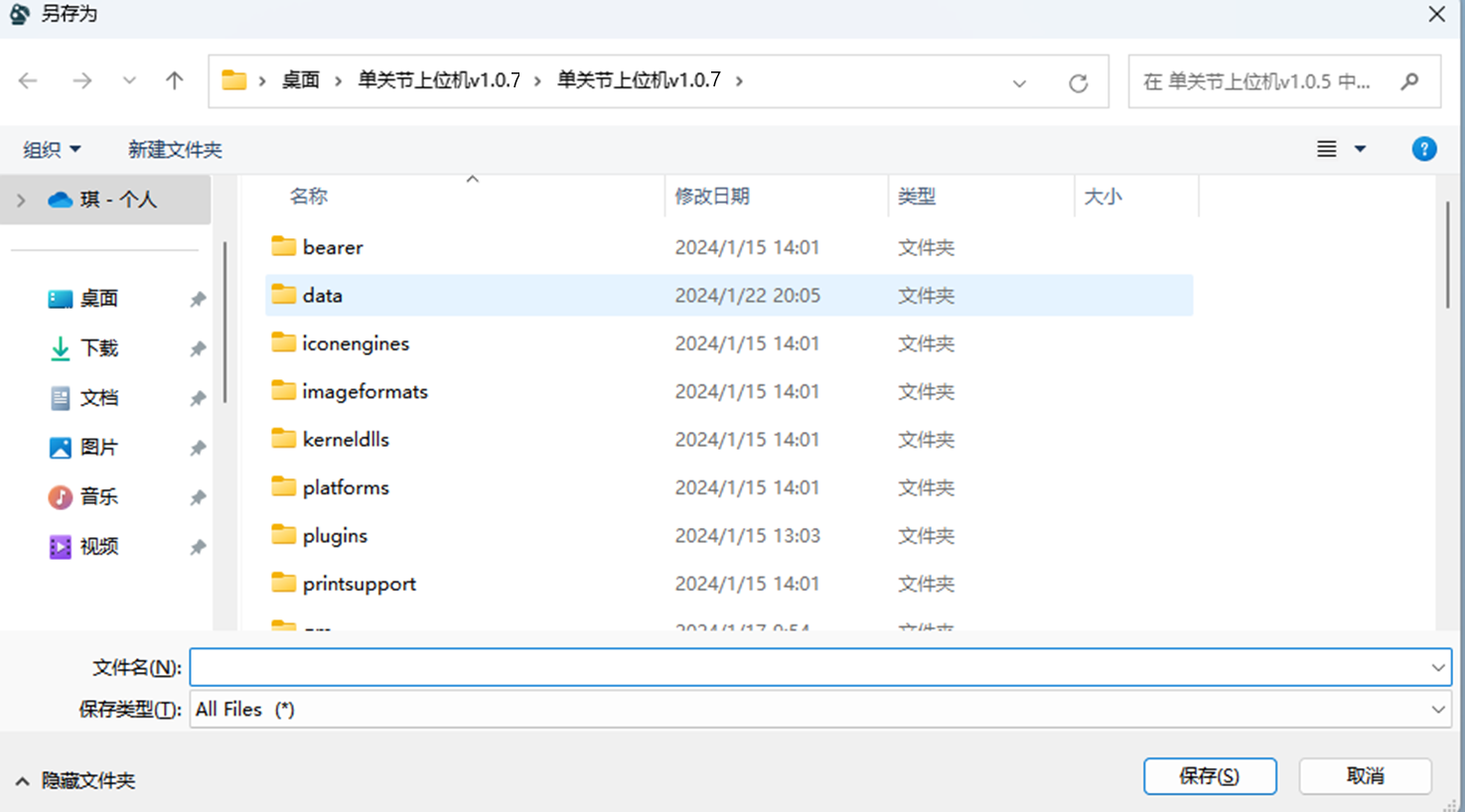
数据导出:点击页面右下角的导出按钮,根据需求选择数据导出类型、导出目标。
- 文档导出:文件名称及文件地址无法选择,导出时提示写入文件成功。文件格式默认固定为txt格式,文件路径为上位机data文件内。

- 图片导出:可选择文件存储地址及文件名称,图片格式默认png。
更新固件
准备工作
软件:在电脑中下载并安装好 WHJoint。
硬件:CAN 盒、24V电源、关节。
连接关节与软件
提醒
进行软件连接前,首先完成硬件的连接:打开WHJoint;can盒的usb口连接电脑,另一端连接到关节的can接口处(CANH与CANL中间要短接一个120Ω的电阻);关节连接24V开关电源。
进入软件配置页面,选择实时页签。
点击页面左上方设备选择模块中的Can卡连接。
打开参数设置窗口,并配置相关参数信息,配置完成后点击确认。
协议栏根据自己所用的Can卡来选择,详细说明如下:
协议 说明 CANFD_ZLG 对接周立功品牌的CANFD协议。 CANOPEN_ZLG 对接周立功品牌的CANOPEN协议。 CANFD_HK 对接虹科品牌的CANFD协议。 CANOPEN_HK 对接虹科品牌的CANOPEN协议。 通道栏选0。
仲裁域栏选1Mbps(目前关节仲裁域只支持1Mbps)。
数据域栏选5Mpbs(目前关节数据域只支持5Mbps)。
确认连接状态:查看设备选择模块,左下角Can卡连接变成断开字样,则说明CAN卡和电脑连接成功。
进行关节通电。
点击扫描设备,设备选择模块中出现所连接的关节信息。
图中关节信息为:
- 序号:设备序号,当存在多关节连接时,序号根据关节数量进行递增。
- ID:关节ID,根据实时扫描,显示已设置的关节ID号。
- 状态:使能状态,根据实时扫描,显示当前关节使能状态,并根据关节状态使用不同颜色进行显示。
掉使能 上使能 - 关节型号:根据实时扫描,显示当前关节型号。
- 固件版本:根据实时扫描,显示当前关节固件版本型号。
- 唯一ID: 根据实时扫描,显示当前关节唯一ID,此ID出厂后不可更改。
更新关节固件
进入软件配置页面,选择信息页签。

点击左侧固件升级按钮,进入固件升级页面。
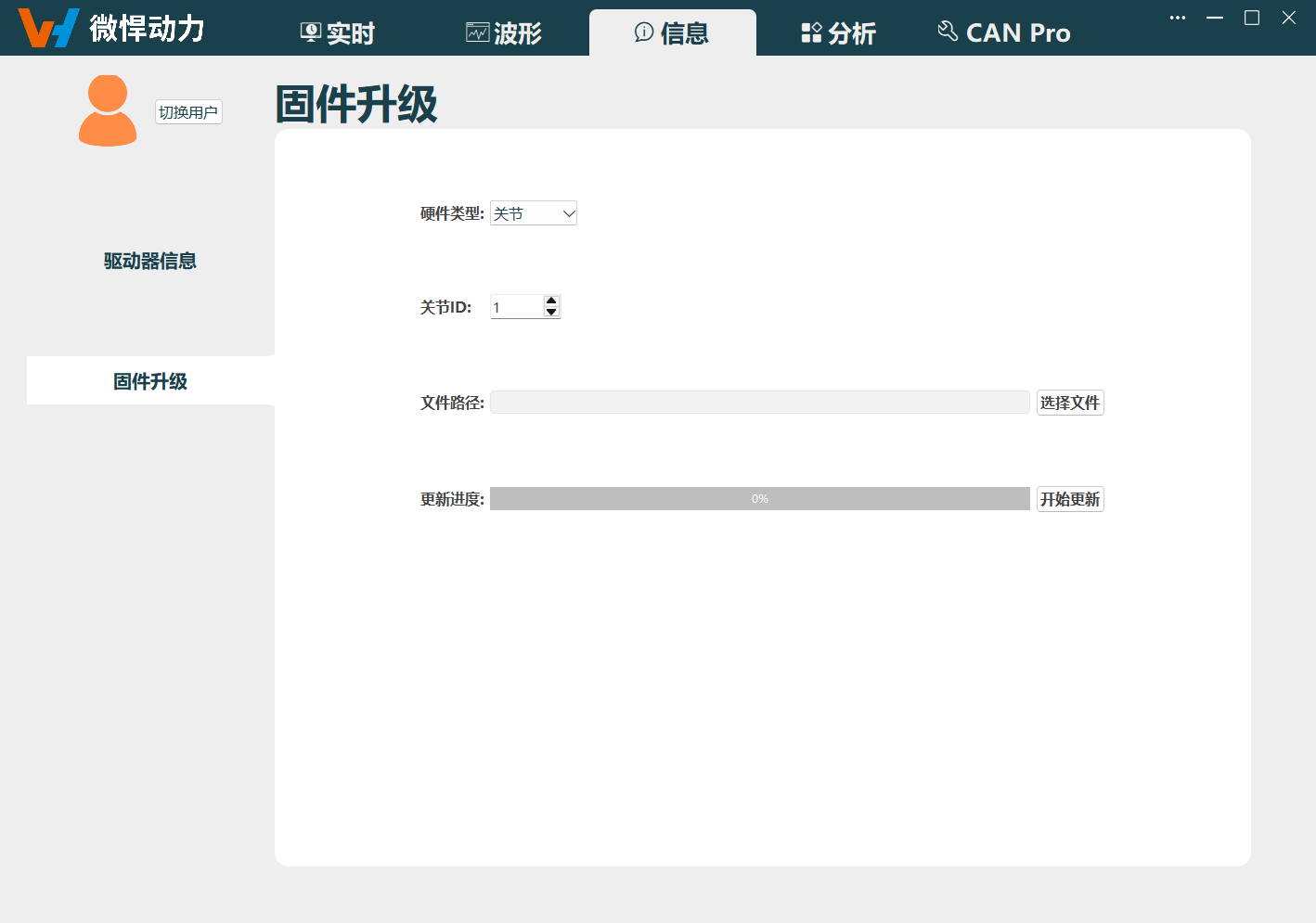
根据需求自定义关节ID、文件路径信息。
- 关节ID:选择关节与软件连接后,所显示的关节ID信息。
- 文件路径:选择目标更新文件。
点击开始更新。
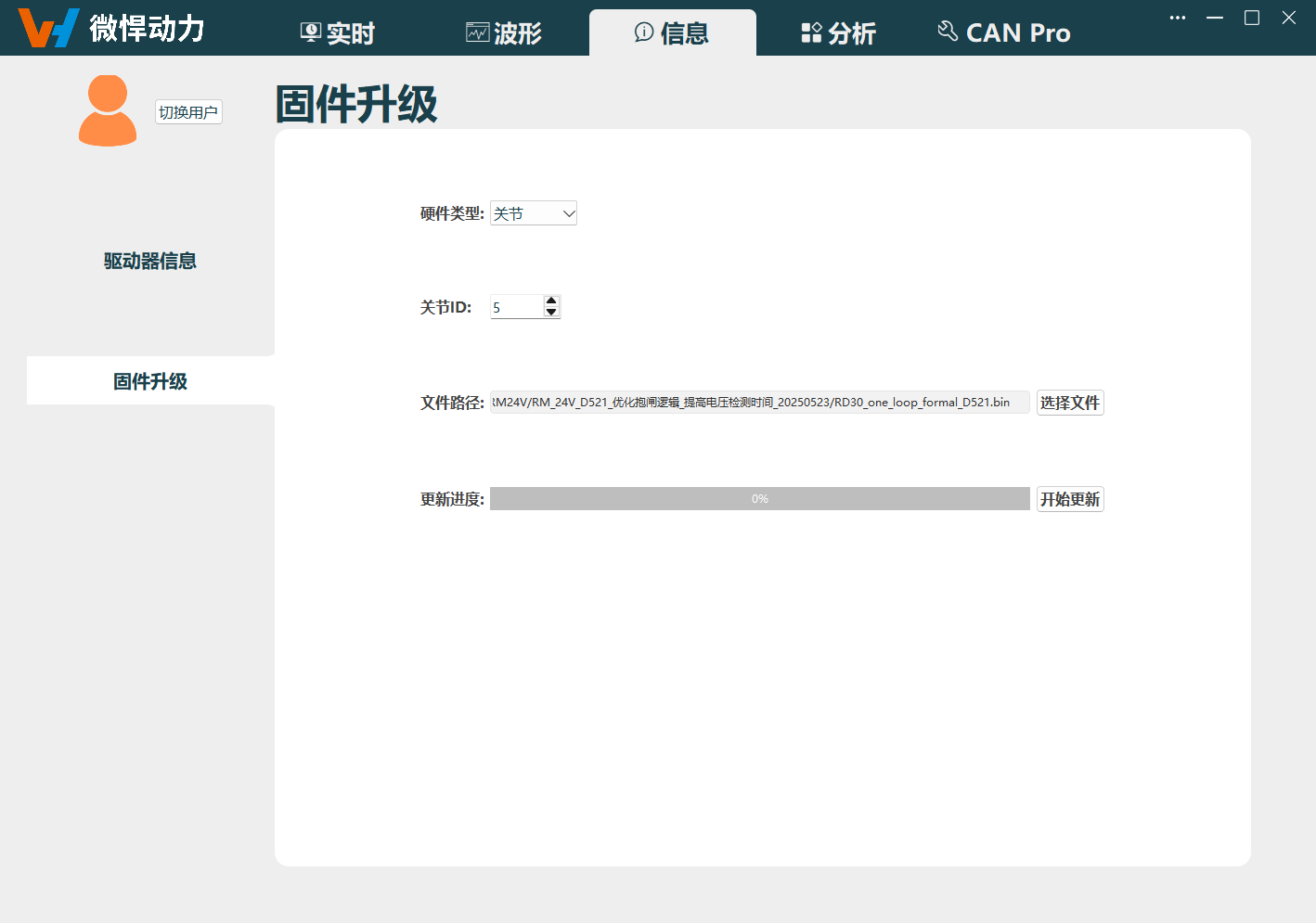
当进度条达到100%后,说明更新成功。
