入门指南:
30系列规格参数 型号:WHJ30_S_D60_80_B
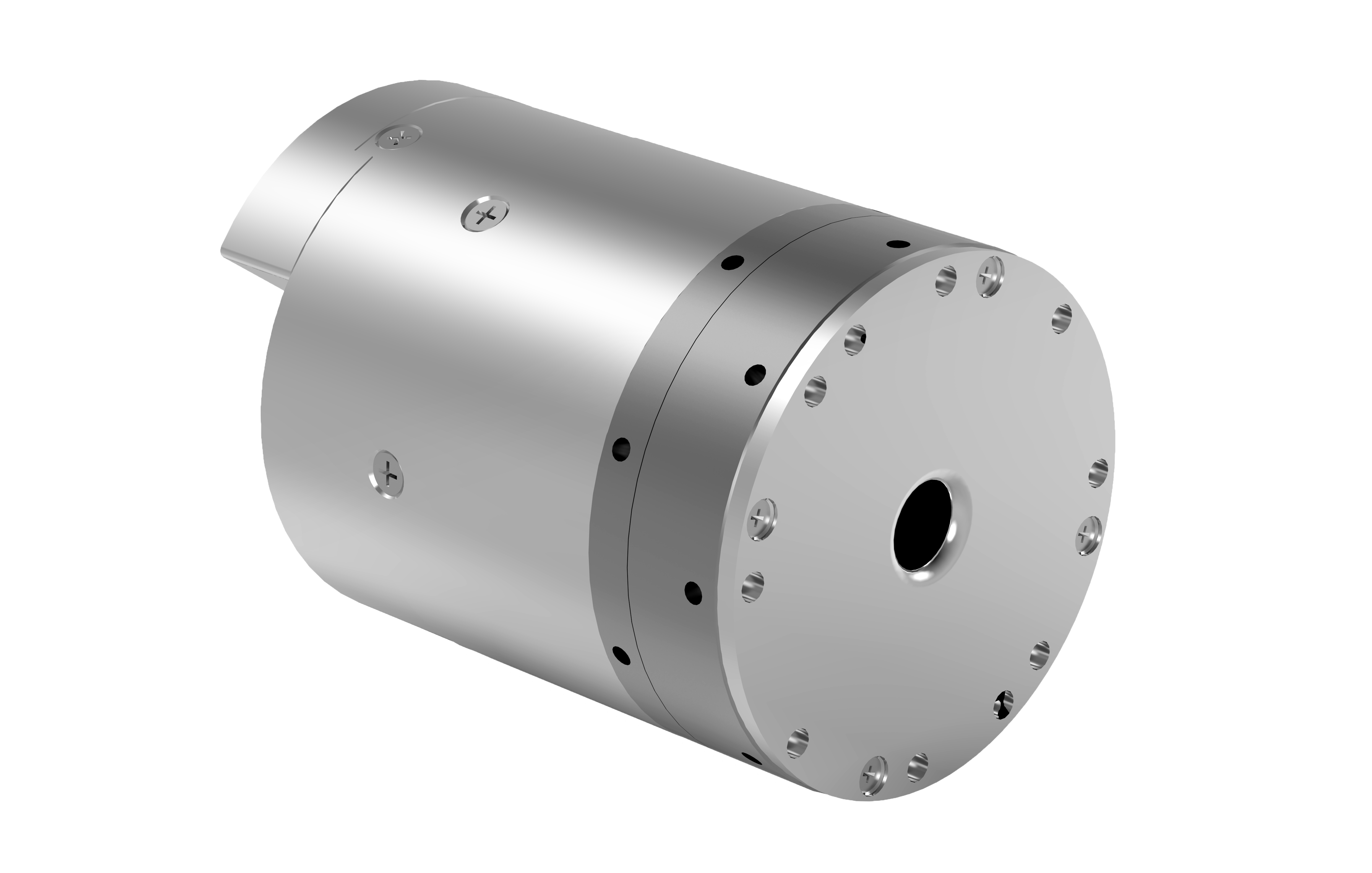
示意图
性能参数
| 参数 | 数值 |
|---|---|
| 减速比 | 80 |
| 产品自重 | 750g |
| 减速器直径mm | 60 |
| 体积(直径×长度mm) | 60*86.5 |
| 额定扭矩N.m | 30 |
| 最大扭矩密度 | 123 |
| 重复定位精度 | ±15角秒 |
| 峰值转速(RPM) | 37.5 (24V) / 75 (48V) |
| 转动惯量(kg*m^2) | 2.98*10^-5 |
| 中空孔径 | 9mm |
| 工作温度 | 0至50℃ |
| 额定功率 | 137W |
| 额定电压 | 24V / 48V |
| 额定电流 | 5.7A (24V) / 2.8A (48V) |
| 刹车类型 | 插销式制动 |
| 增量编码器 | 16bits |
| 绝对位置编码器 | 18bits |
| 通讯接口 | CANFD |
| 场景举例 | 机械臂、手术机器人、人形机器人肘关节、踝关节、脖关节、肩关节等。 |
关节模组工作在大负载和高转速情况下会再生制动动能,需要外加“电源泄放模块”(详见 电源泄放模块),避免再生动能回馈导致电源电压冲高发生母线电压过高报错停机。
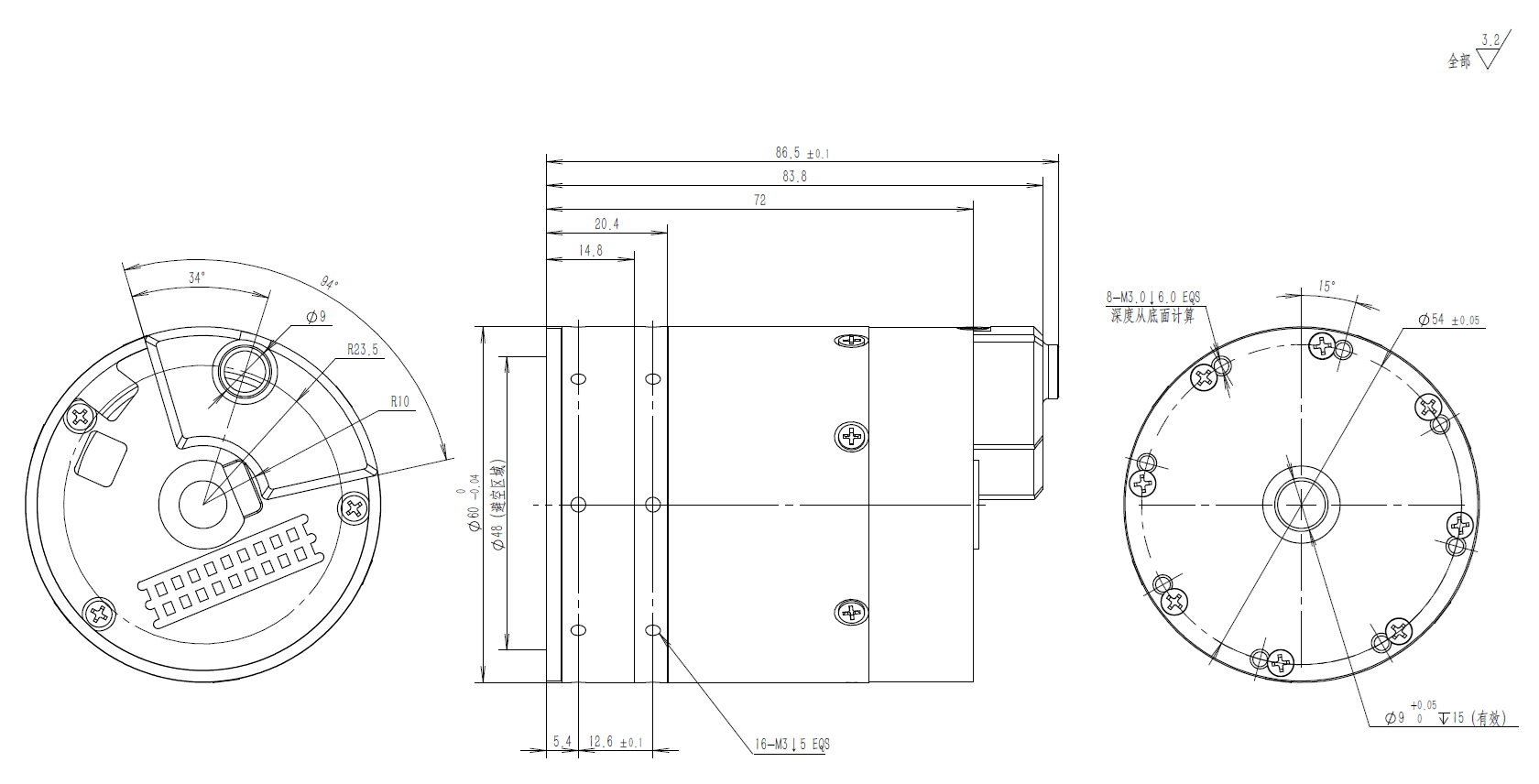
详细尺寸