关节:
关节电气说明 关节输入电源说明
电源电压和额定功率
电源使用24VDC供电(出厂设定最小允许母线电压为20V,推荐最大母线电压为30V),驱动器在检测到超过35V时会触发过电压故障,在检测到低于20V时出现电压过低报警。
| 型号 | 电压 | 功率 |
|---|---|---|
| WHJ10-80 | 24V | 63W |
| WHJ30-80 | 24V | 188W |
| WHJ60-100 | 24V | 292W |
关节电压的极限值
关节电源接口最大承受电压为DC38V,输入电压超过38V易导致驱动器故障。当使用开关控制关节供电时,上电瞬间可能存在过压冲击(>38V的情况),此种供电方式需在开关后、关节电源输入前并联一个电解电容(参考规格:820uF,50V),以抑制上电瞬间输入电压的过冲现象。
使用24V开关电源供电时,需要接我司提供的保护器件,用于保护开关电源和吸收反电动势。
使用电池供电时不需要考虑反电动势的影响,因为关节的反电动势直接会对电池进行充电;若电池功率较小,也可以连接我司提供的保护器件,使系统更加可靠。
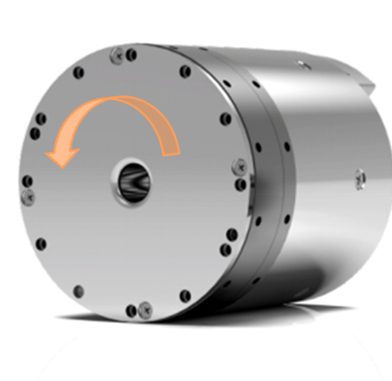
关节正转方向
面对减速机输出端,关节正转方向为逆时针旋转,此方向不可修改,关节旋转方向由目标指令的方向决定,目标指令由控制器端发出。
电气接口说明
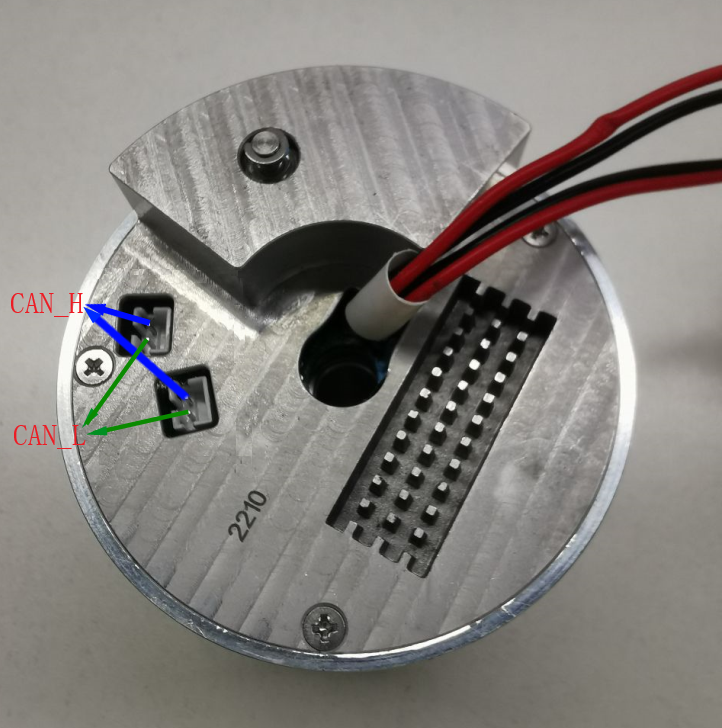
CAN 通信接口
端子型号为PH2.0-2A,端子如下图所示:
多圈供电电池接口
端子型号为PH2.0-2A,接口正负极如下图所示(红正黑负):

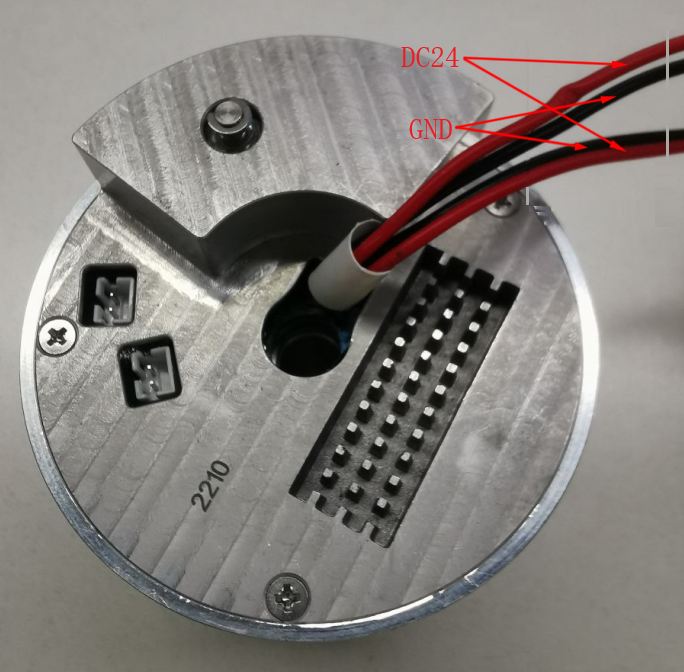
24V供电电源接口
电源线接口正负极如下图所示(红正黑负):
多关节模组间线缆连接
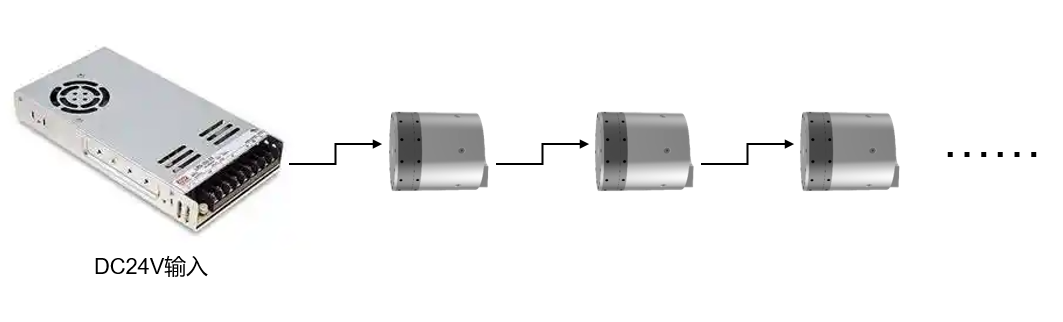
电源接线方式说明
链型拓扑连接;若单关节功率较大,也可单独直连。
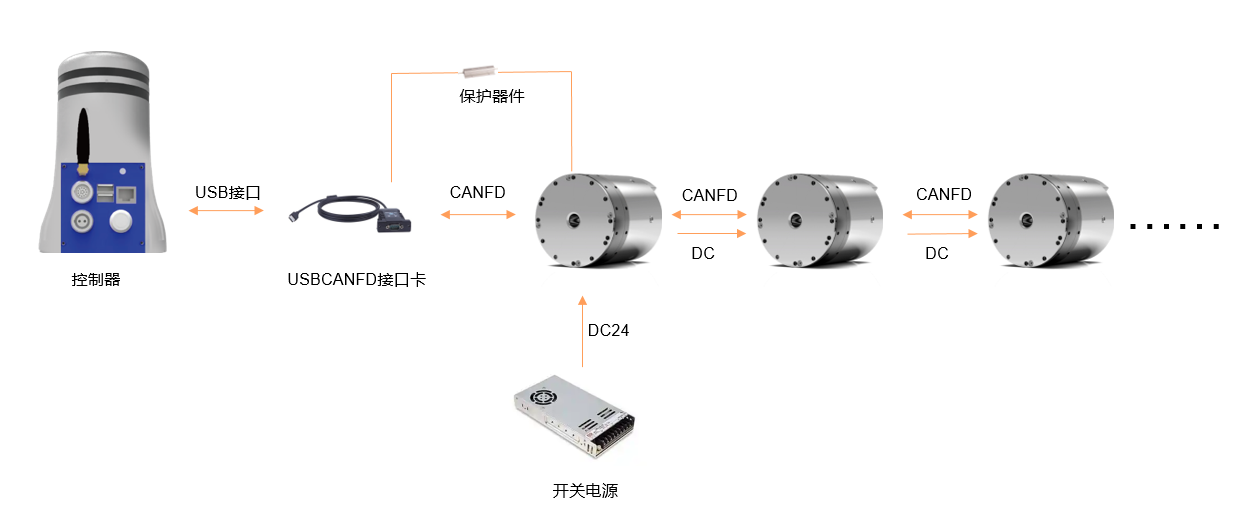
CANFD通信接线图
(1)CANFD 通信线采用双绞线,5Mbps的数据传输速率,链型拓扑连接; (2)控制器端和末端伺服的CAN 接口各需并联一个120Ω终端电阻(非常重要); (3)确保每个关节模组的 CAN ID设定唯一 ;
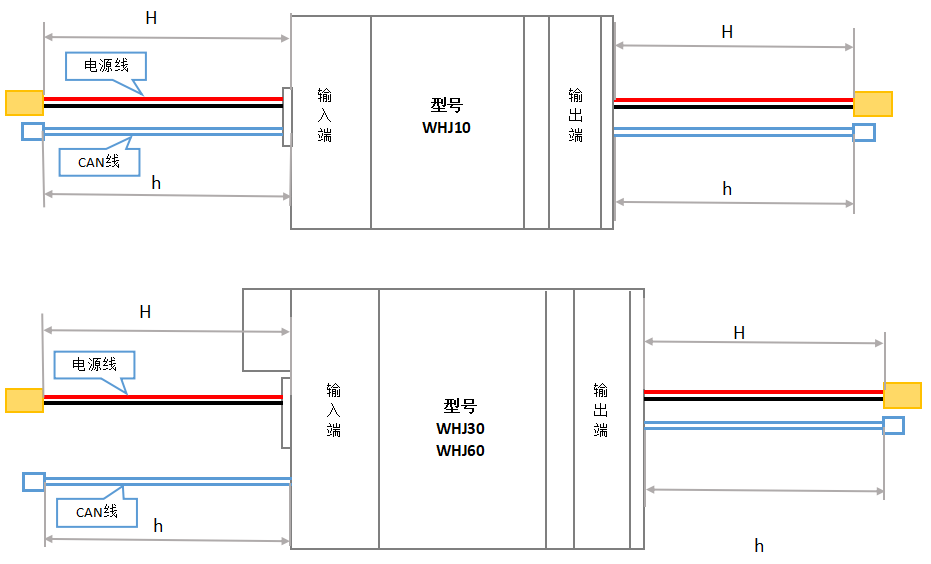
CANFD线及电源线长度说明
WHJ10:
WHJ30:
WHJ60:
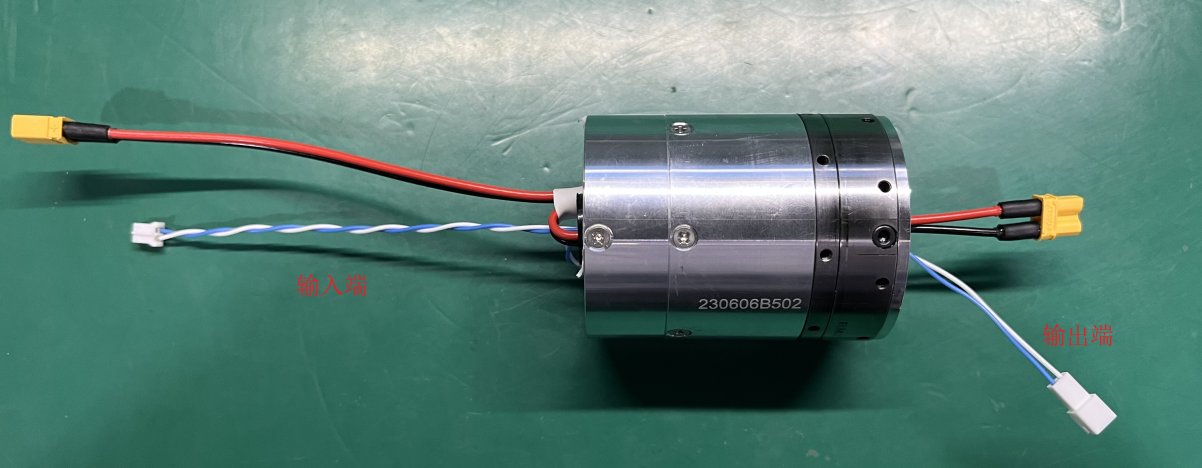
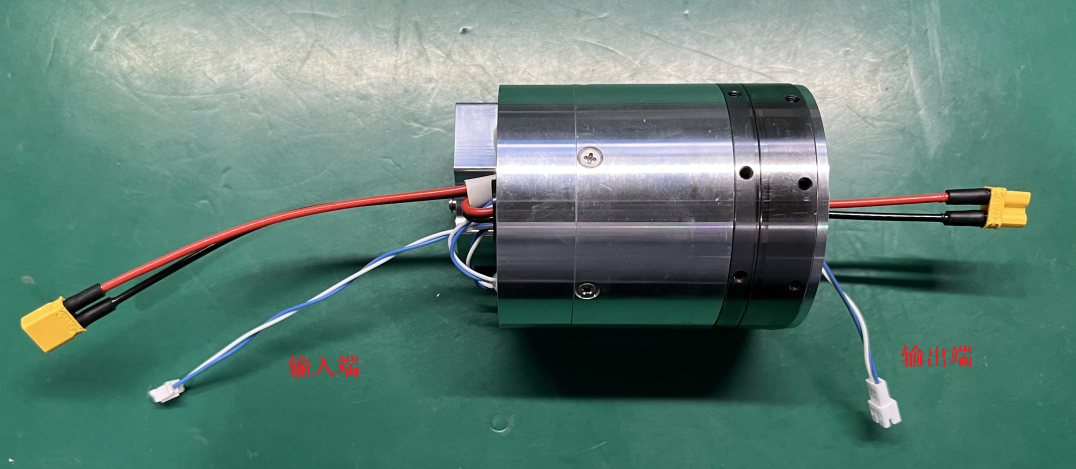
线缆和端子规格说明
| 接口数 | 关节输入端线型 | 关节输出端线型 | 线材 | 过电流(A) | |||||
|---|---|---|---|---|---|---|---|---|---|
| 端子 | 线长(mm) | 端子 | 线长(mm) | 截面积(mm²) | AWG | ||||
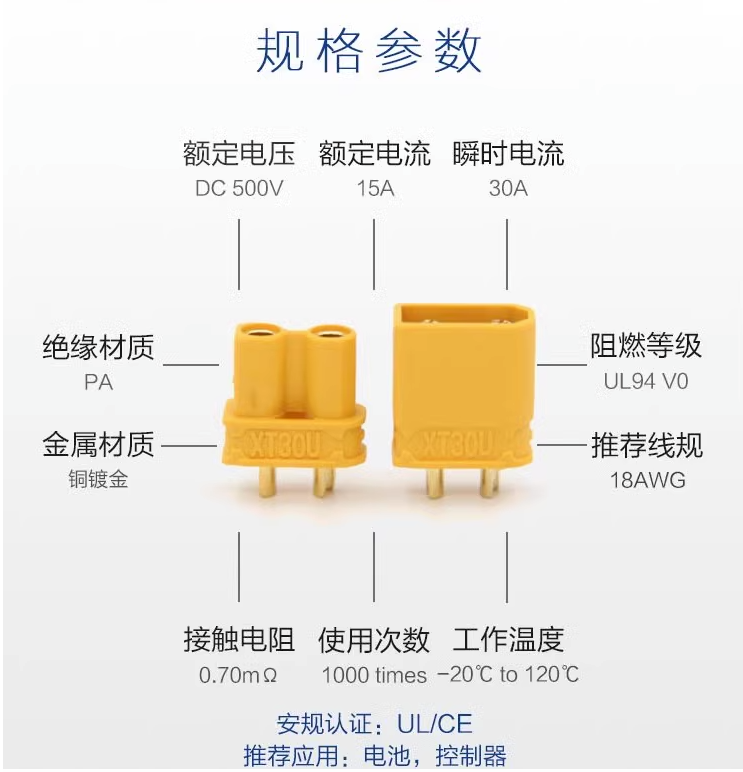
| 电源 | WHJ60单关节电源接口 | 2P*2 | XT30U-M | 140-150 | XT30U-F | 35-45 | 0.75(芯数150/0.08) | 按电流约16~18 | 额定15/最大30 |
| WHJ30单关节电源接口 | 2P*2 | XT30U-M | 110-120 | XT30U-F | 40-50 | 0.75(芯数150/0.08) | 按电流约16~18 | 额定15/最大30 | |
| WHJ10单关节电源接口 | 2P*2 | XT30U-M | 110-120 | XT30U-F | 45-55 | 0.75(芯数150/0.08) | 按电流约16~18 | 额定15/最大30 | |
| 信号CAN | WHJ60单关节电源接口 | 2P*2 | BX-PH2.0-2PJK外壳 | 155-165 | A2001HM-2P空中对接 | 50-60 | 0.5(芯数30/0.08) | 26 | 额定3/最大6 |
| 压线端子:A2001-TP/BX-PH2.0-DZ | 压线端子:A2001M-TP | ||||||||
| WHJ30单关节电源接口 | 2P*2 | BX-PH2.0-2PJK外壳 | 155-165 | A2001HM-2P空中对接 | 55-65 | 0.5(芯数30/0.08) | 26 | 额定3/最大6 | |
| 压线端子:A2001-TP/BX-PH2.0-DZ | 压线端子:A2001M-TP | ||||||||
| WHJ10单关节电源接口 | 2P*2 | BX-PH2.0-2PJK外壳 | 125-135 | A2001HM-2P空中对接 | 40-50 | 0.5(芯数30/0.08) | 26 | 额定3/最大6 | |
| 压线端子:A2001-TP/BX-PH2.0-DZ | 压线端子:A2001M-TP | ||||||||
因产品不同构型不同关节位置对CAN线及电源线的长度要求不同,CAN线及电源线均为默认长度,如有特殊长度需求,可联系我们对产品订单进行备注。
多圈供电电池说明
电池作用
为多圈编码器供电,保存关节的多圈计数,避免设备零位丢失。
电池相关报错处理
重新设置零位,可以进行软复位。