入门指南:
选配功能 手柄控制机械臂

手柄简介
手柄采用2.4G技术进行无线通信,配备1个接收器。手柄遥控距离可达15米(此距离与使用环境有关)。其上共有15个按键及2个摇杆。

控制方法
- 确保机械臂处于断电状态,将2.4G接收器安装于USB口1。如下图所示。
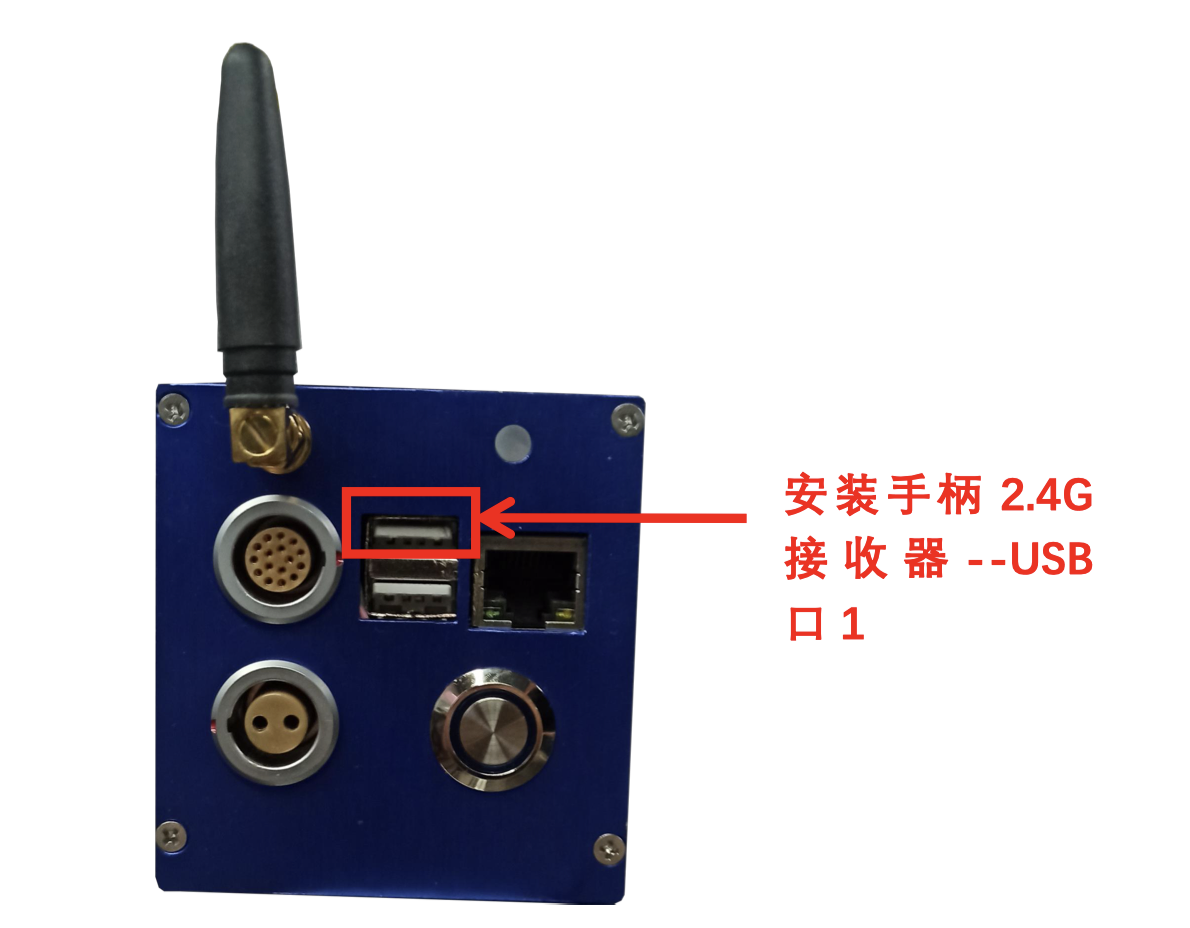
- 等待机械臂开机完成,将手柄开机键拨至“ON”档。打开手柄电源,等待手柄前方信号指示灯红灯常亮时,说明连接成功。

- 手柄键位及控制模式介绍

手柄控制分为位置姿态控制和单轴关节控制间切换,切换方式为点击手柄中间位置的MODE键。机械臂开机与手柄连接默认为位置姿态控制模式,按下MODE键控制模式切换为单轴关节控制模式,模式切换成功之后机械臂会根据不同的模式发出不同的声音。切换为位置姿态控制机械臂发出“滴~”声;切换为单轴关节控制机械臂会发出“滴~滴~滴”声。
位置姿态控制模式
在进行位置姿态控制模式之前,需要通过拖拽示教或单轴关节控制模式,使机械臂处于下图类似,方便进行位置位姿控制。位姿图手柄左侧方向键、L1、L2键分别对应控制机械臂X+、X-、Y+、Y-、Z+、Z-方向运动。详情参考下表。
单轴关节控制模式
进入单轴关节控制模式之后,手柄左侧方向键、L1、L2、右侧功能键、R1、R2分别控制各个关节正负方向运动。
手柄按键对应功能
| 手柄键位 | 使用方法 | 位置及姿态控制模式 | 单轴关节控制模式 |
|---|---|---|---|
| MODE键 | 短按 | 2种模式切换 | |
| 左侧方向键--上 | 短按/长按 | 基坐标系Y+方向移动 | 关节1沿正方向运动 |
| 左侧方向键--下 | 短按/长按 | 基坐标系Y-方向移动 | 关节1沿负方向运动 |
| 左侧方向键--左 | 短按/长按 | 基坐标系X+方向移动 | 关节2沿正方向运动 |
| 左侧方向键--右 | 短按/长按 | 基坐标系X-方向移动 | 关节2沿负方向运动 |
| 左侧L1键 | 短按/长按 | 基坐标系Z+方向移动 | 关节3沿正方向运动 |
| 左侧L2键 | 短按/长按 | 基坐标系Z-方向移动 | 关节3沿负方向运动 |
| 右侧功能键--Y | 短按/长按 | 沿Y+方向做姿态变化 | 关节4沿正方向运动 |
| 右侧功能键--A | 短按/长按 | 沿Y-方向做姿态变化 | 关节4沿负方向运动 |
| 右侧功能键--X | 短按/长按 | 沿X+方向做姿态变化 | 关节5沿正方向运动 |
| 右侧功能键--B | 短按/长按 | 沿X-方向做姿态变化 | 关节5沿负方向运动 |
| 右侧R1键 | 短按/长按 | 沿Z+方向做姿态变化 | 关节6沿正方向运动 |
| 右侧R2键 | 短按/长按 | 沿Z-方向做姿态变化 | 关节6沿负方向运动 |
IO扩展
功能介绍
在机械臂使用过程中,根据不同的场景,机械臂的IO可能数量不够,满足不了实际使用需求的情况。在这种情况下就需要用到外部IO控制器,本文中提到的外部IO控制器可外接8个外部数字输入传感器、8个外部数字输出信号口。
机械臂底部控制器与机械臂末端均可外接IO控制器,本文以机械臂控制器接口为例,如需使用机械臂末端接口请参考机械臂协议文档或接口文档。
串口IO控制器的使用
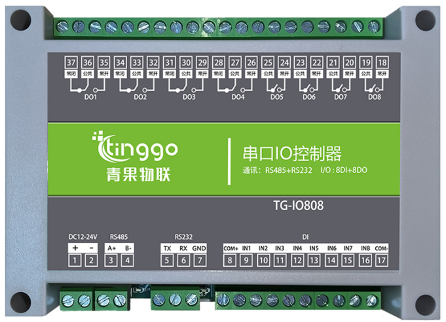
设备接线
| 机械臂末端接口 | 串口IO控制器 |
|---|---|
| 电源输出(粉色/棕色) | DC12-24V + |
| 电源GND(灰色/紫色) | DC12-24V - |
| RS485_A(黄色线) | RS485A |
| RS485_B(黄绿色线) | RS485B |
IO控制器的供电为宽电压12~24V,接线完成之后需设置机械臂控制器输出相对应的电压,电压的具体设置根据传感器所需供电进行设置。
串口IO控制器和16芯线
 |  |
|---|---|
| 控制器接线:485接口及24V供电 | 控制器接线:线材实物连接 |
机械臂开启通信及供电设置
机械臂开启末端通信及供电有多种方式,此处以JSON协议的方式进行设置。串口IO控制器相关的详细指令在本文中不做讲解,详情参考云盘中文档说明。
使用socket助手通过TCP向控制器下发如下JSON协议字符串:
- 配置通讯端口ModbusRTU模式
{"command":"set_modbus_mode","port":0,"baudrate":9600,"timeout":20}命令下发成功后,socket助手会收到控制器反馈内容,如下所示:
{"command":"set_modbus_mode","set_state":true}若set_state值返回true,则设置成功。
若set_state值返回false,则设置失败。
- 设置电源输出(I 系列),输出电压为24V
{"command":"set_voltage","voltage_type":3}命令下发成功后,socket助手会收到控制器反馈内容,如下所示:
{"command":"set_voltage","state":true}- 写单圈数据,设置串口IO控制器继电器1号输出
{"command":"write_single_coil","port":0,"address":1,"data":1,"device":1}命令下发成功后,socket助手会收到控制器反馈内容,如下所示:
{"command":"write_single_coil","write_state":true}- 单圈数据,设置串口IO控制器继电器1号输出
{"command":"write_single_coil","port":0,"address":1,"data":1,"device":1}命令下发成功后,socket助手会收到控制器反馈内容,如下所示:
{"command":"write_single_coil","write_state":true}- 写单圈数据,设置串口IO控制器继电器1号关闭输出
{"command":"write_single_coil","port":0,"address":1,"data":0,"device":1}命令下发成功后,socket助手会收到控制器反馈内容,如下所示:
{"command":"write_single_coil","write_state":true}- 读离散量输入,读取0号信号
{"command":"read_input_status","port":0,"address":0,"num":1,"device":1}命令下发成功后,socket助手会收到控制器反馈内容,如下所示:
{"command":"input_status","read_state":true}- 测试完成,关闭通讯端口 ModbusRTU 模式
{"command":"close_modbus_mode","port":0}命令下发成功后,socket助手会收到控制器反馈内容,如下所示:
{"command":"close_modbus_mode","set_state":true}- 设置电源输出(I 系列),输出电压为0V
{"command":"set_voltage","voltage_type":0}命令下发成功后,socket助手会收到控制器反馈内容,如下所示:
{"command":"set_voltage","state":true}场效应管模块
功能介绍
机械臂控制器位置有4路可复用数字IO,可通过示教器或指令切换为数字输出,但默认输出电流只有2mA,如果需要控制大功率设备,如:电机、灯泡、继电器、电磁阀等,可以选配场效应管模块。
场效应管模块输出端被控功率为100W以内。
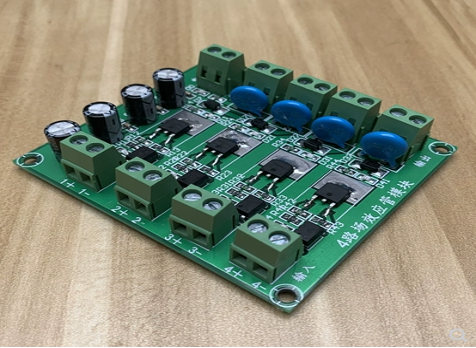
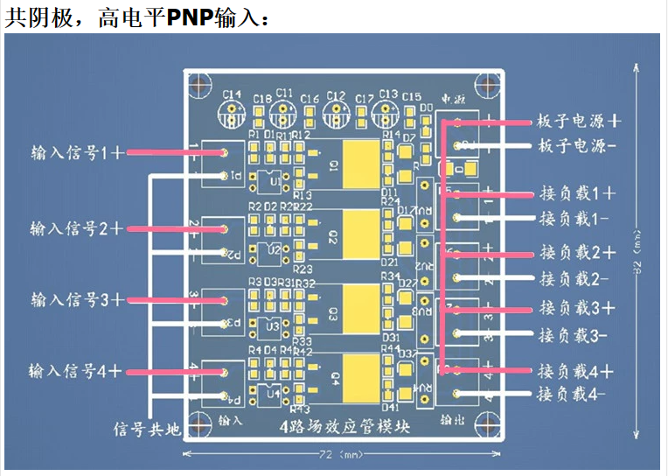
场效应管模块的使用
机械臂IO需设置为输出模式,分别连接场效应管模块的输入信号。
具体接线方法如下图所示: