入门指南:
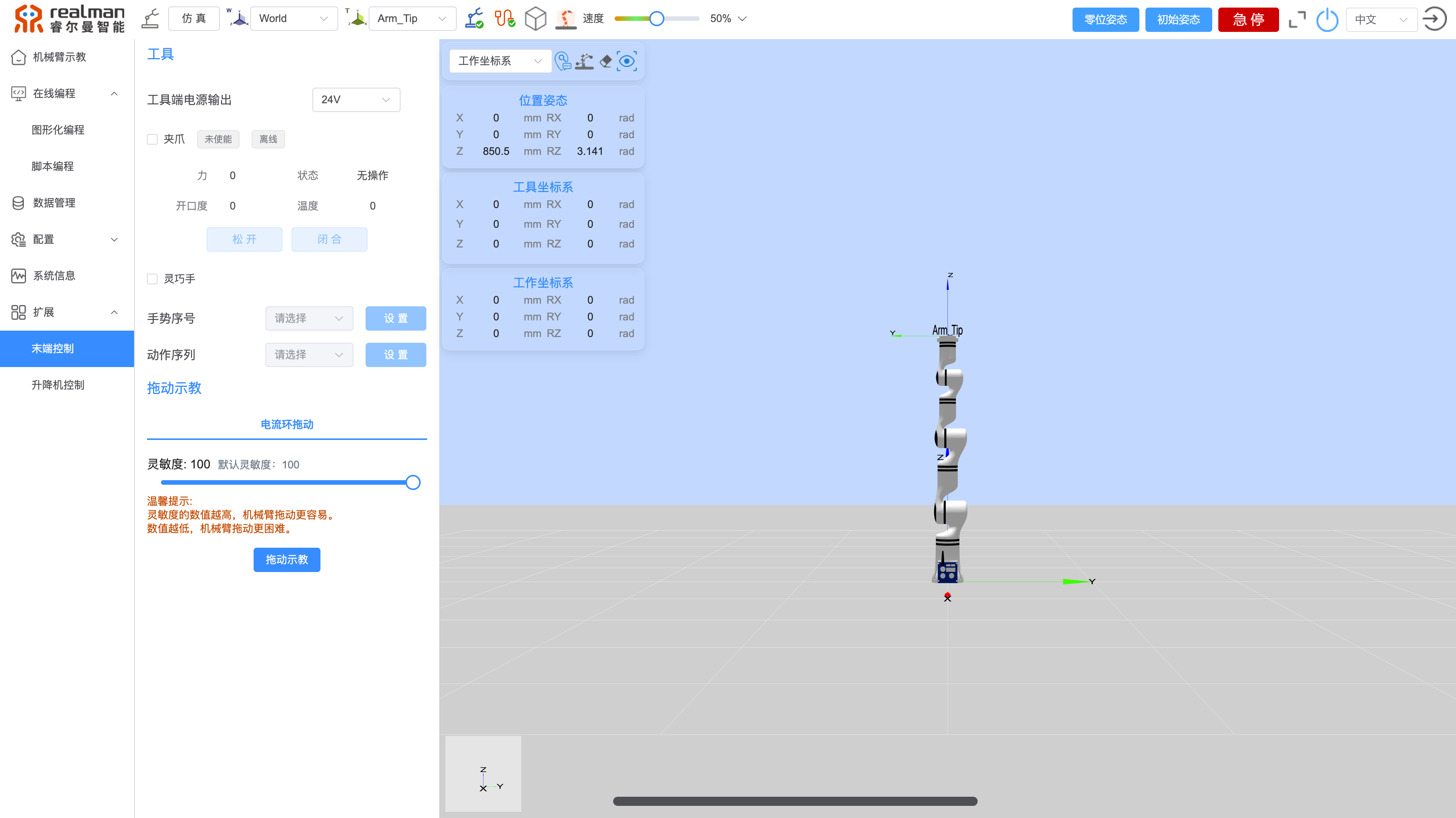
机械臂扩展 在示教器的扩展界面可对末端工具进行配置和拖动示教的设置如下图所示:
末端控制
末端工具
在示教器的扩展界面可对末端工具进行配置,并可切换工具端对外的输出电压,对末端手爪进行简单的控制,如下图所示:

电源输出:该部分可配置末端接口板对外的输出电源,可配置为0V,12V和24V。
外接设备:目前工具端默认添加夹爪和灵巧手,后续可增加其它设备。
- 夹爪控制:安装夹爪并勾选夹爪,且当夹爪状态为使能和在线时,支持查看夹爪当前状态参数,以及进行
松开和闭合控制; - 灵巧手控制:安装灵巧手并勾选灵巧手后,可通过设置灵巧手的
手势序号和动作序列,来设置手势和动作。此处手势序号和动作序列为灵巧手内定义的手势和动作。
拖动示教
除了通过机器人示教界面记录点位,运行轨迹之外,机器人还支持拖动示教功能,在示教器上点击拖动示教按钮,然后拖动机器人。完成后再次点击完成拖动示教,完成轨迹记录,弹出新增轨迹保存窗口,可根据需求来选择是否保存轨迹文件。
| 开始拖动示教 | 完成拖动示教 |
|---|---|
 |  |
轨迹记录完成后,点击机器人末端的蓝色按钮,可对轨迹进行复现。
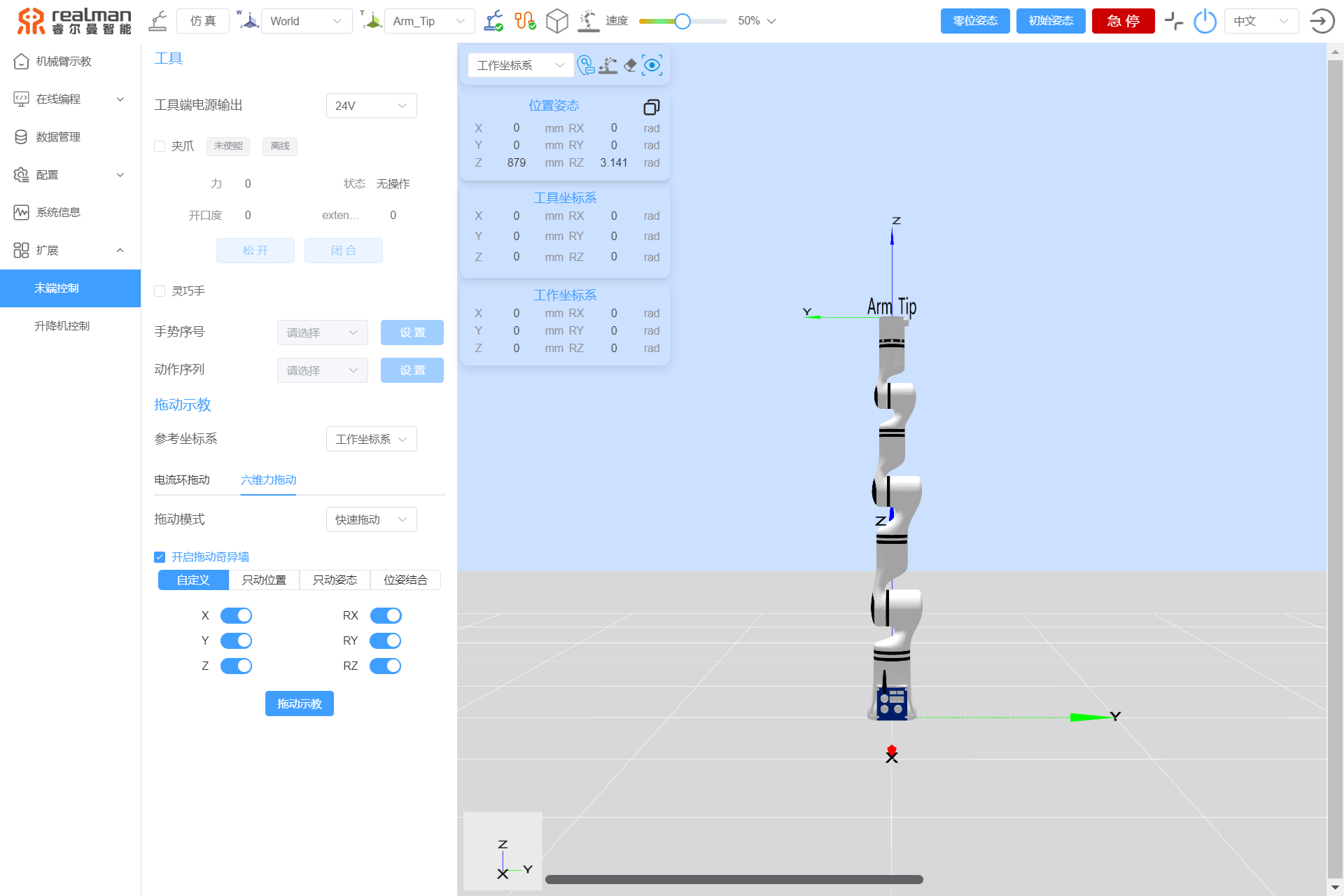
拖动示教包括:
- 参考坐标系:可根据需要选择工作坐标系和工具坐标系。
- 电流环拖动示教:开启电流环模式后,可拖动机械臂的任意位置来改变机械臂的姿态,支持设置灵敏度数值,数值越高,机械臂拖动越容易;数值越低,机械臂拖动越困难。
- 六维力拖动示教:仅六维力版本的机械臂提供此拖动模式,可根据需要选择拖动模式以及是否开启拖动奇异墙,并支持自定义、只动位置、只动姿态、位姿结合等拖动方式。用户也可自由组合六维力版本机械臂的拖动状态。
- 拖动模式:精确拖动模式,拖动较沉,但拖动精度较高,可以用于精确拖动至目标位置;快速拖动模式,拖动较轻,但拖动精度较低,可以用于快速拖动至目标位置。
- 拖动方式:只动位置,允许机械臂通过所有轴移动,无法旋转;只动姿态,允许机械臂在所有轴上以球面运动方式绕TCP(末端中心点)移动;位姿结合,允许通过所有轴移动,所有轴都是自由的。
当机器人末端工具为我公司标配的两指手爪时,在拖动示教过程中,除了可记录机器人运动轨迹之外,还可以记录手爪动作。长按绿色按钮拖动示教的同时,长按蓝色按钮,手爪关闭;短按蓝色按钮,手爪打开。
升降机控制、拓展关节控制
在示教器的扩展界面可对升降机控制进行参数配置如下图所示。可对当前位置进行上升或下降,也可以设置目标位置后点击“运动”按钮使升降机到达目标高度。

在示教器的扩展界面可对拓展关节进行控制,参数配置如下图所示:

在连接拓展关节后会显示当前速度、加速度、电流、最大最小限位、减速比系数。为了防止关节在连接上后有错误,请在连接后先清除关节错误,再点击上使能。拓展关节可向正向运动或者反向运动。可设置目标角度运动,在下方可调节拓展关节运动速度。