入门指南:
MODBUS-TCP功能 RM65 I系列机械臂可以通过MODBUS-TCP协议直接调用WEB示教器保存的编程文件,也可直接控制或者查询机械臂状态。
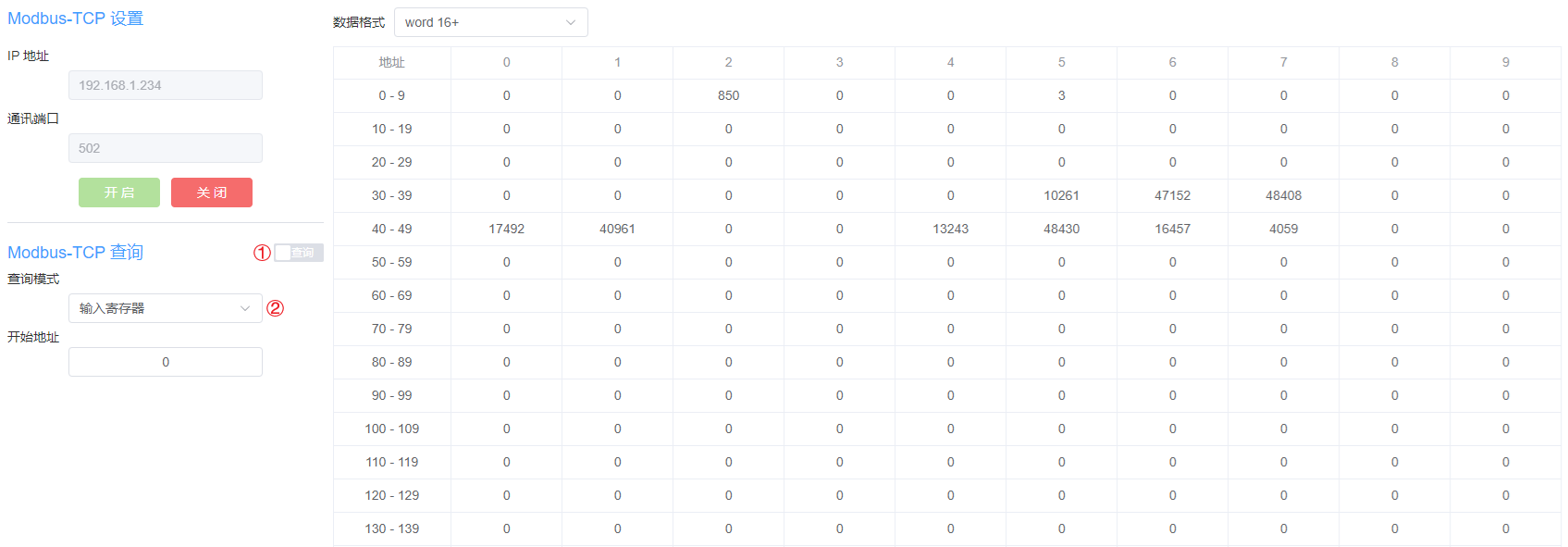
- Modbus-TCP设置: 显示连接设备的默认地址和通信接口,当需要使用MODBUS-TCP功能时,请点击
开启完成MODBUS-TCP功能开启;当使用完毕后,请点击关闭完成MODBUS-TCP功能关闭。 - Modbus-TCP查询/写入: 可根据需要点击切换按钮,切换查询模式和写入模式,同时支持根据需要选择寄存器开始地址。
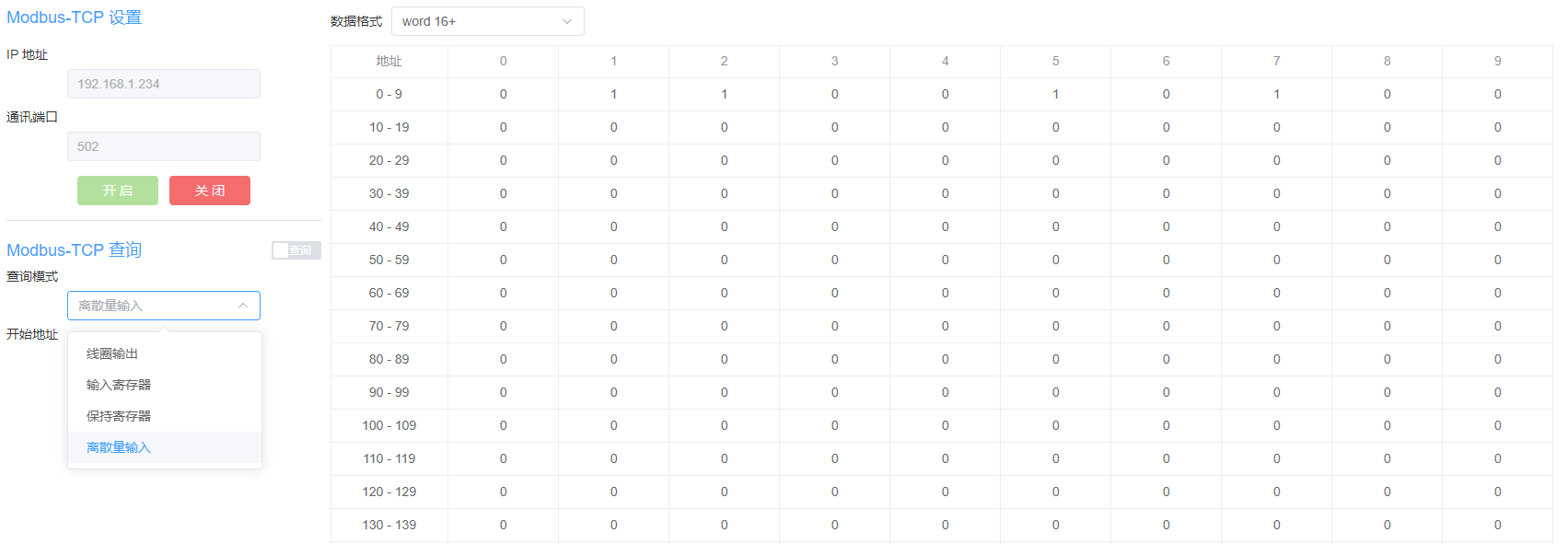
- 查询模式: 可根据需要查询机械臂当前数据,包括线圈输出、输入寄存器、保存寄存器和离散量输入。
- 写入模式: 可根据需要写入寄存器,包括线圈输出和保存寄存器。
- 开始地址: 设置查询寄存器的起始地址,可仅显示起始地址之后的寄存器数据,不设置时,显示全部的寄存器地址的数据。
- 数据显示格式切换: 在寄存器查询结果中,可根据需要切换数据的显示格式,目前支持word16+、deline+/-和hex三种。
调用在线编程文件
使用Modbus-TCP协议,可以调用数据管理中保存的图形化编程文件。

调用步骤:
- 在Modbus-TCP设置页面,点击
开启开启MODBUS-TCP功能。 - 选择
写入模式中保持寄存器,并点击寄存器地址为1的值,如下图所示。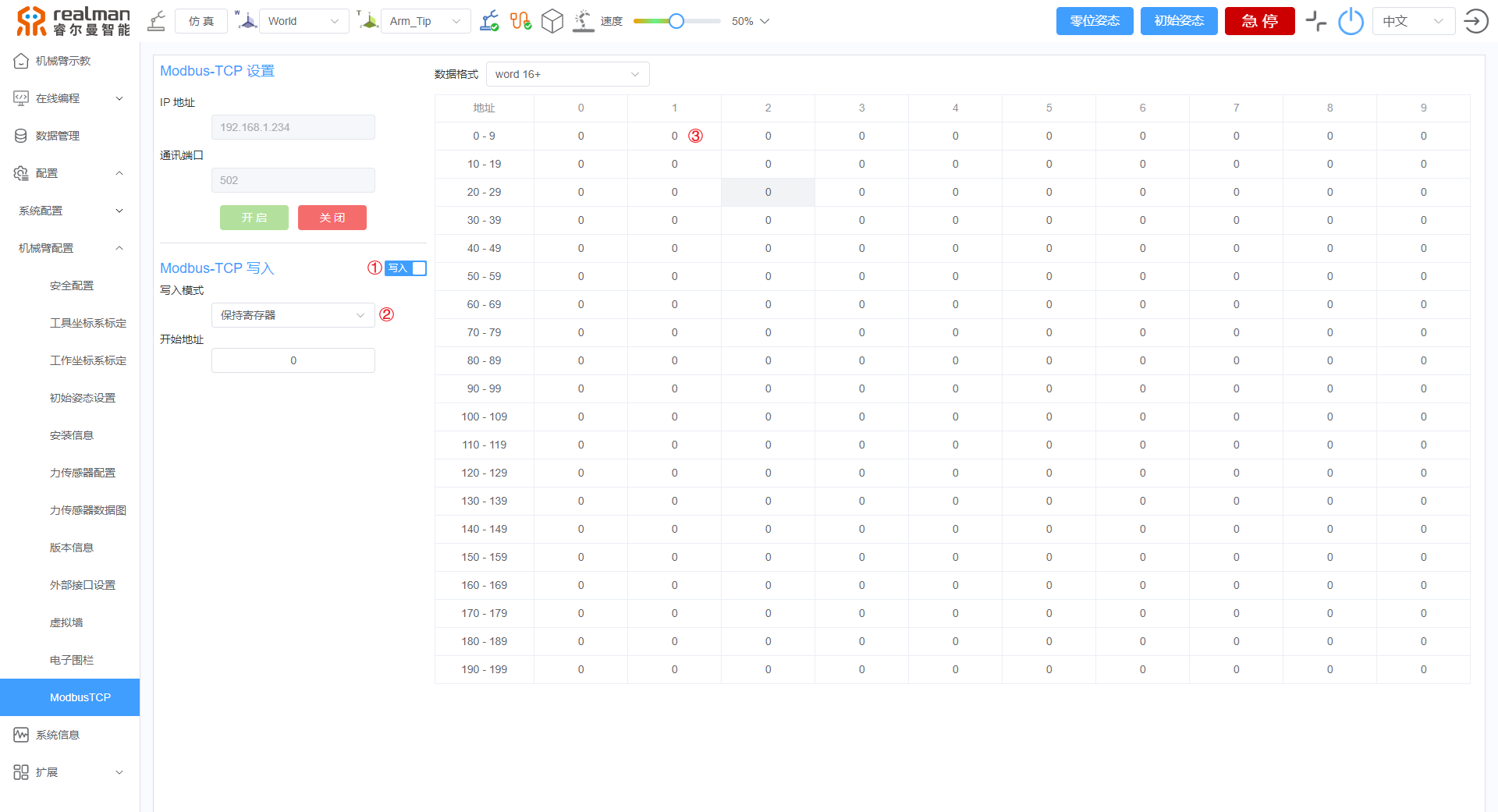
- 在弹出的
写入对话框中填写调用的图形化编程文件编号,并点击写入完成调用。
控制机械臂
- 当用户选择
写入模式中的保存寄存器,可使用modbus-TCP协议在对应寄存器内写入角度、位置、姿态,控制机械臂移动。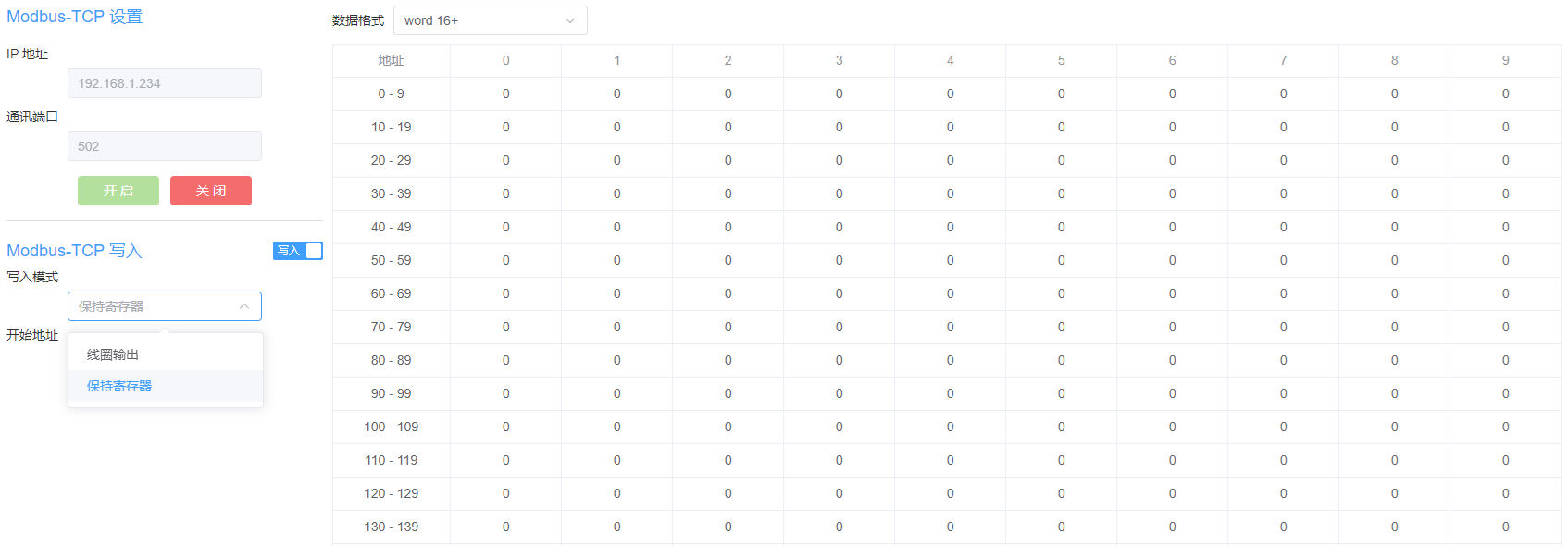
- 当用户选择
查询模式中的保存寄存器,可查询机械臂当前数据。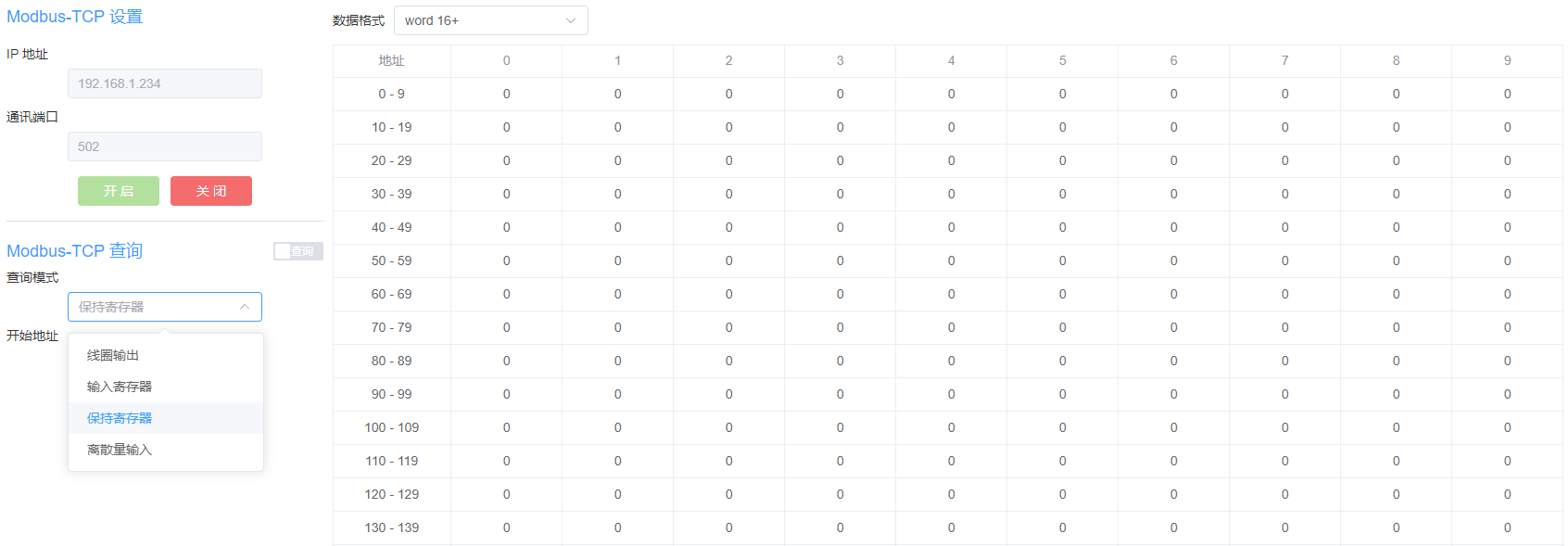
- 具体地址参数值说明,请参考保持寄存器指令集。
获取机械臂当前状态
用户选择查询模式中的输入寄存器可查询机械臂当前数据。具体地址参数值说明,请参考输入寄存器指令集。
IO线圈输出
- 当用户选择
查询模式中的线圈输出,可根据在地址栏中的参数值,获取IO模式的输入或者输出状态。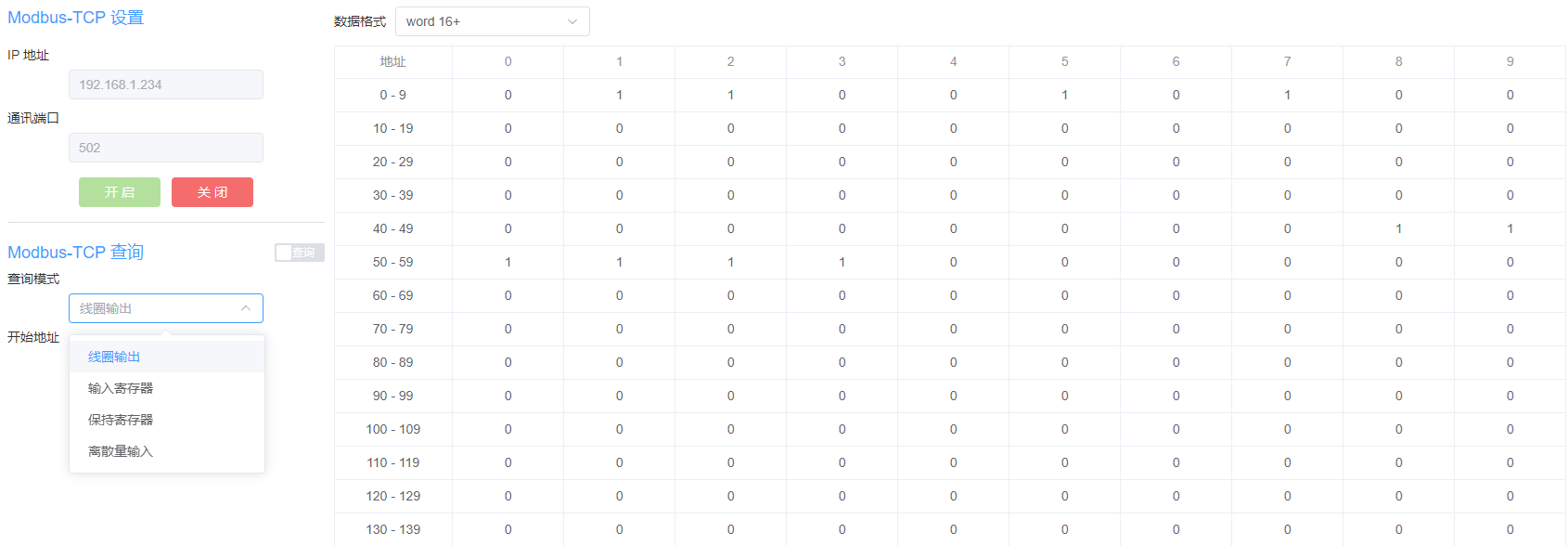
- 当用户选择
写入模式中的线圈输出,可根据需要修改地址栏中的参数值,修改IO模式的输入或者输出状态。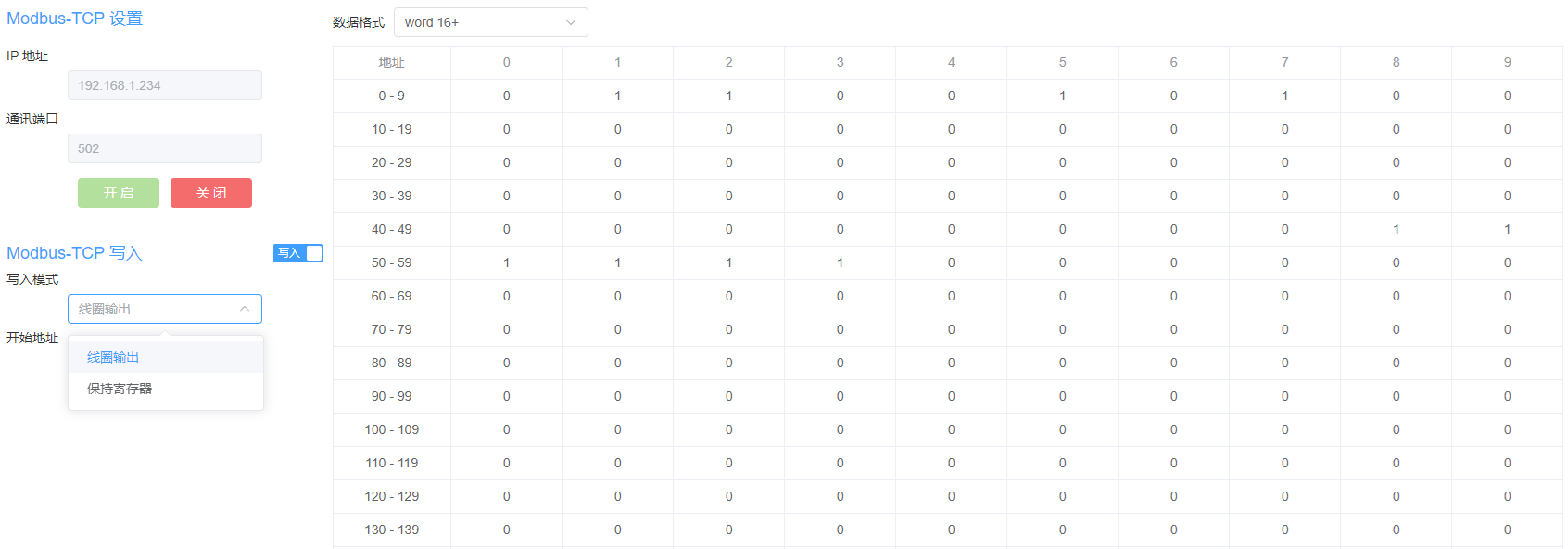
- 具体地址参数值说明,请参考线圈输出寄存器指令集。
IO离散量输入
当用户选择查询模式中的离散量输入,可以通过参数值来读取当前机械臂状态。具体地址参数值说明,请参考离散量输入寄存器指令集。