Start guide:
MODBUS-TCP Function The RM65 I-series robotic arm can directly call programming files saved by the WEB teach pendant via the MODBUS-TCP protocol, and can also directly control or query the robotic arm's state.
- Modbus-TCP Settings: Displays the default address and communication interface of the connected device. When you need to use the MODBUS-TCP function, please click Enable to activate the MODBUS-TCP function; after use, please click Disable to deactivate the MODBUS-TCP function.
- Modbus-TCP Query/Write: You can switch between query and write modes by clicking the toggle button as needed, and also select the starting address of the register as required.
- Query Mode: You can query the current data of the robotic arm as needed, including coil outputs, input registers, holding registers, and discrete inputs.
- Write Mode: You can write to registers as needed, including coil outputs and holding registers.
- Starting Address: Set the starting address for querying registers. Only the data of registers after the starting address will be displayed. If not set, all register address data will be displayed.
- Data Display Format Switching: In the register query results, you can switch the display format of the data as needed. Currently, three formats are supported: word16+, deline+/-, and hex.
Call online programming files
Using the Modbus-TCP protocol, you can call graphical programming files saved in data management.

Calling Steps:
- On the Modbus-TCP settings page, click
Turn Onto activate the MODBUS-TCP function. - Select
Holding ResinRead-inMode, and click on the value of register address 1, as shown in the figure below.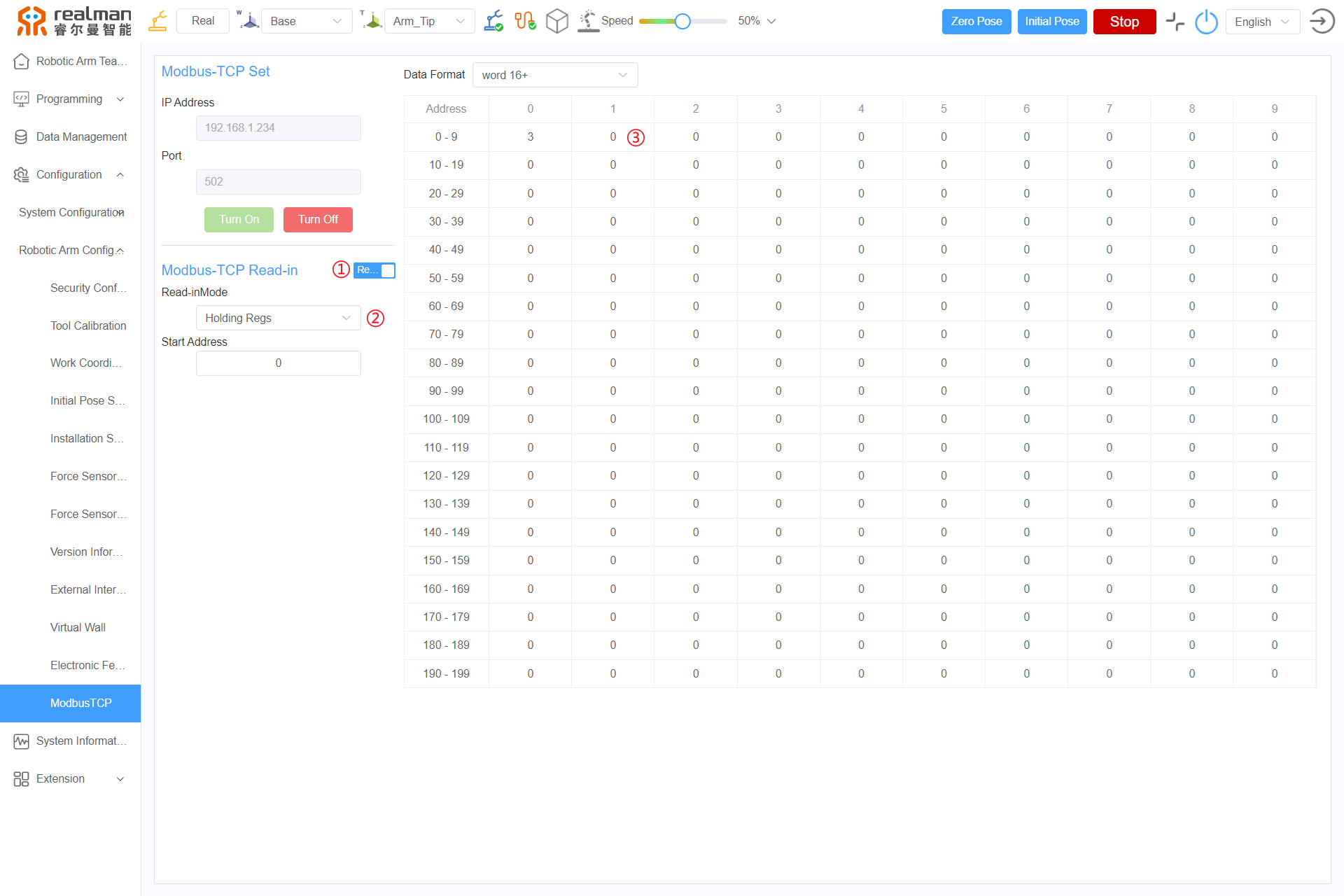
- In the
Read-indialog box, enter the number of the graphical programming file to be called, and clickRead-into complete the call.
Control the robotic arm
- When users select
Holding ResinRead-inMode, they can use the Modbus-TCP protocol to write angles, positions, and orientations into the corresponding registers, controlling the movement of the robotic arm.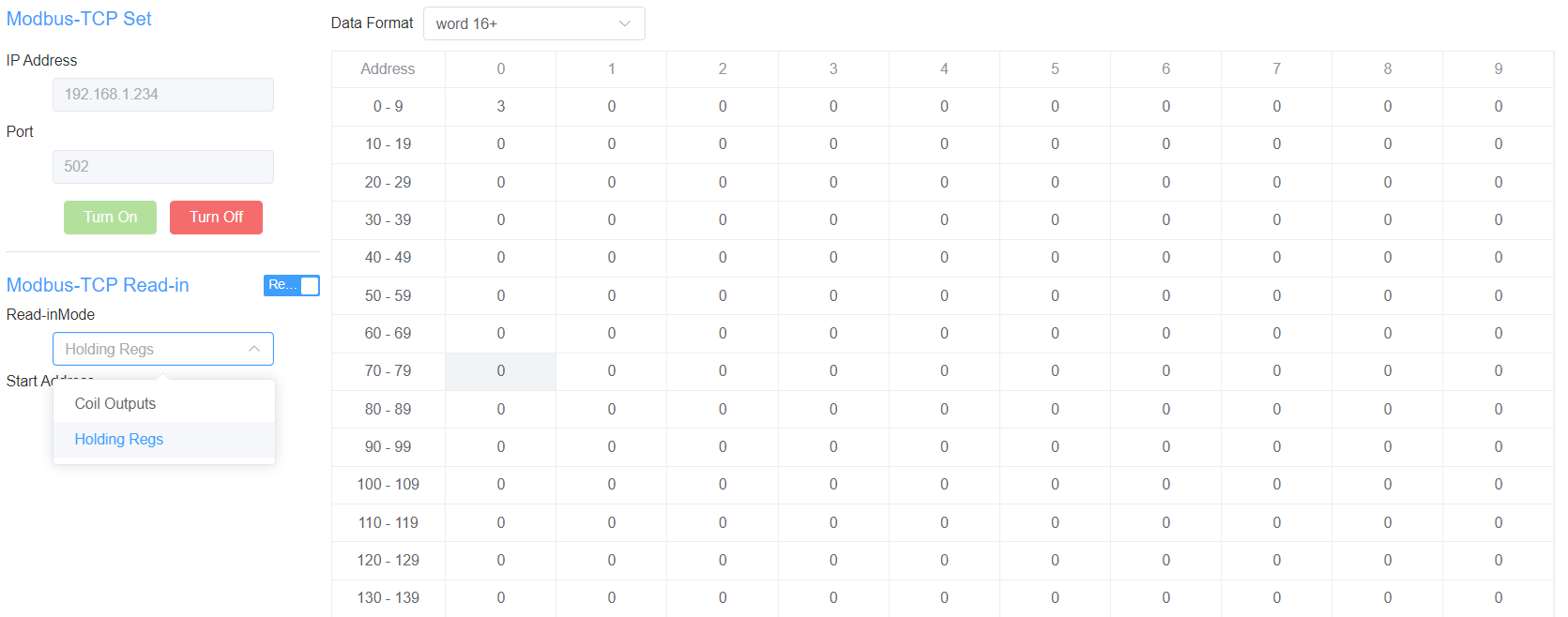
- When users select
Holding ResinQuery Mode, they can query the current data of the robotic arm.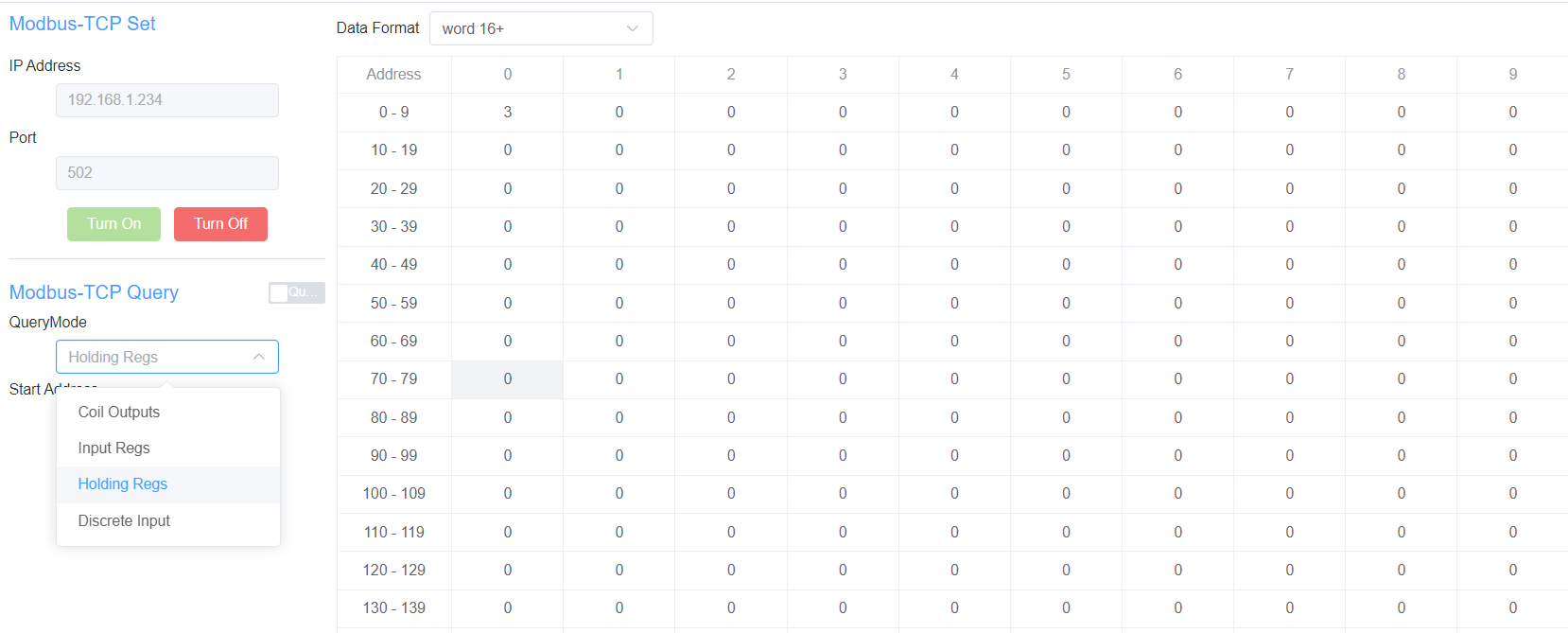
- For detailed explanations of address parameter values, please refer to the Holding Registers Command Set.
Get the current state of the robotic arm
Users can select Holding Res in Query Mode to retrieve the current data of the robotic arm. For detailed explanations of address parameter values, please refer to the Holding register instruction set

IO Coil Output
- When users select
Coil OutputsinQuery Mode, they can obtain the input or output status of the IO mode based on the parameter value in the address bar.
- When users select
Coil OutputsinRead-inMode, they can modify the parameter value in the address bar as needed to change the input or output status of the IO mode.
- For detailed explanations of address parameter values, please refer to the Coil Output Register Command Set.
IO Discrete Input
When users select Discrete Input in Query Mode, they can read the current status of the robotic arm through the parameter value. For detailed explanations of address parameter values, please refer to the Discrete Input Register Command Set.
