Python:
Five-Fingered Dexterous Hand ConfigurationHandControl It is used to set the five-fingered dexterous hand control. The following is a detailed description of the member functions of the five-fingered dexterous hand configuration HandControl, including the method prototype, parameter description, return value, and usage demo.
Run dexterous hand target gesture sequence number rm_set_hand_posture()
rm_set_hand_posture()- Method prototype:
rm_set_hand_posture(self, posture_num: int, block: bool, timeout: int) -> int:- Parameter description:
| Parameter | Type | Description |
|---|---|---|
posture_num | int | Gesture sequence number pre-stored in the dexterous hand, range: 1−40 |
block | bool | true: blocking mode, return after the dexterous hand finishes its movement; false: non-blocking mode, immediately return after sending the command |
timeout | int | Timeout setting in blocking mode, in s |
- Return value: State codes executed by functions:
| Parameter | Type | Description | Handling Suggestions |
|---|---|---|---|
| 0 | int | Success. | - |
| 1 | int | The controller returns false, indicating that the parameters are sent incorrectly or the robotic arm state is wrong. | - Validate JSON Command: ① Enable DEBUG logs for the API to capture the raw JSON data. ② Check JSON syntax: Ensure correct formatting of parentheses, quotes, commas, etc. (You can use a JSON validation tool). ③ Verify against the API documentation that parameter names, data types, and value ranges comply with the specifications. ④ After fixing the issues, resend the command and check if the controller returns a normal status code and business data. - Check Robot Arm Status: ① Check for real-time error messages in the robot arm controller or logs (such as hardware failures, over-limit conditions), and reset, calibrate, or troubleshoot hardware issues according to the prompts. ② After fixing the issues, resend the command and check if the controller returns a normal status code and business data. |
| -1 | int | The data transmission fails, indicating that a problem occurs during the communication. | Check Network Connectivity: Use tools like ping/telnet to check if the communication link with the controller is normal. |
| -2 | int | The data reception fails, indicating that a problem occurs during the communication, or the controller has a return timeout. | - Check Network Connectivity: Use tools like ping/telnet to check if the communication link with the controller is normal. - Verify Version Compatibility: ① Check if the controller firmware version supports the current API functions. For specific version compatibility, refer to the Version Description. ② If the version is too low, upgrade the controller or use an API version that is compatible. |
| -3 | int | The return value parse fails, indicating that the received data format is incorrect or incomplete. | Verify Version Compatibility: ① Check if the controller firmware version supports the current API functions. For specific version compatibility, refer to the Version Description. ② If the version is too low, upgrade the controller or use an API version that is compatible. |
| -4 | int | The current in-position equipment verification fails, indicating the current in-position equipment is not a dexterous hand. | - Detect Concurrent Control by Multiple Devices: Check if other devices are sending motion commands to the robot arm, including the motion of the robot arm, gripper, dexterous hand, and elevator. - Monitor Command Events in Real-Time: Register the callback function rm_get_arm_event_call_back:① Capture device arrival events (such as motion completion, timeout, etc.). ② Determine the specific device type that triggered the event through the device parameter in the callback. |
| -5 | int | Timeout, no response returns. | - Check Timeout Setting: In blocking mode, it supports configuring the timeout for waiting for the device to complete its motion. Ensure that the timeout is set longer than the device's motion time. - Check Network Connectivity: Use tools like ping/telnet to check if the communication link with the controller is normal. |
- Usage demo
from Robotic_Arm.rm_robot_interface import *
# Instantiate the RoboticArm class
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# Create the robotic arm connection and print the connection ID
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
print(arm.rm_set_hand_posture(1, True, 10))
arm.rm_delete_robot_arm()Run dexterous hand action sequence number rm_set_hand_seq()
rm_set_hand_seq()- Method prototype:
rm_set_hand_seq(self, seq_num: int, block: bool, timeout: int) -> int:- Parameter description:
| Parameter | Type | Description |
|---|---|---|
seq_num | int | Gesture sequence number pre-stored in the dexterous hand, range: 1−40 |
block | bool | true: blocking mode, return after the dexterous hand finishes its movement; false: non-blocking mode, immediately return after sending the command |
timeout | int | Timeout setting in blocking mode, in s |
- Return value: State codes executed by functions:
| Parameter | Type | Description | Handling Suggestions |
|---|---|---|---|
| 0 | int | Success. | - |
| 1 | int | The controller returns false, indicating that the parameters are sent incorrectly or the robotic arm state is wrong. | - Validate JSON Command: ① Enable DEBUG logs for the API to capture the raw JSON data. ② Check JSON syntax: Ensure correct formatting of parentheses, quotes, commas, etc. (You can use a JSON validation tool). ③ Verify against the API documentation that parameter names, data types, and value ranges comply with the specifications. ④ After fixing the issues, resend the command and check if the controller returns a normal status code and business data. - Check Robot Arm Status: ① Check for real-time error messages in the robot arm controller or logs (such as hardware failures, over-limit conditions), and reset, calibrate, or troubleshoot hardware issues according to the prompts. ② After fixing the issues, resend the command and check if the controller returns a normal status code and business data. |
| -1 | int | The data transmission fails, indicating that a problem occurs during the communication. | Check Network Connectivity: Use tools like ping/telnet to check if the communication link with the controller is normal. |
| -2 | int | The data reception fails, indicating that a problem occurs during the communication, or the controller has a return timeout. | - Check Network Connectivity: Use tools like ping/telnet to check if the communication link with the controller is normal. - Verify Version Compatibility: ① Check if the controller firmware version supports the current API functions. For specific version compatibility, refer to the Version Description. ② If the version is too low, upgrade the controller or use an API version that is compatible. |
| -3 | int | The return value parse fails, indicating that the received data format is incorrect or incomplete. | Verify Version Compatibility: ① Check if the controller firmware version supports the current API functions. For specific version compatibility, refer to the Version Description. ② If the version is too low, upgrade the controller or use an API version that is compatible. |
| -4 | int | The current in-position equipment verification fails, indicating the current in-position equipment is not a dexterous hand. | - Detect Concurrent Control by Multiple Devices: Check if other devices are sending motion commands to the robot arm, including the motion of the robot arm, gripper, dexterous hand, and elevator. - Monitor Command Events in Real-Time: Register the callback function rm_get_arm_event_call_back:① Capture device arrival events (such as motion completion, timeout, etc.). ② Determine the specific device type that triggered the event through the device parameter in the callback. |
| -5 | int | Timeout, no response returns. | - Check Timeout Setting: In blocking mode, it supports configuring the timeout for waiting for the device to complete its motion. Ensure that the timeout is set longer than the device's motion time. - Check Network Connectivity: Use tools like ping/telnet to check if the communication link with the controller is normal. |
- Usage demo
from Robotic_Arm.rm_robot_interface import *
# Instantiate the RoboticArm class
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# Create the robotic arm connection and print the connection ID
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
print(arm.rm_set_hand_seq(1, True, 15))
arm.rm_delete_robot_arm()Set the angles of the dexterous hand’s degrees of freedomrm_set_hand_angle()
- Method prototype:
rm_set_hand_angle(self, hand_angle: list[int]) -> int:- Parameter description:
| Parameter | Type | Description |
|---|---|---|
seq_num | int | Gesture sequence number pre-stored in the dexterous hand, range: 1−40 |
block | bool | true: blocking mode, return after the dexterous hand finishes its movement; false: non-blocking mode, immediately return after sending the command |
timeout | int | Timeout setting in blocking mode, in s |
- Return value: State codes executed by functions:
0 represents success. For other error codes, please refer to the API2 Error Codes.
- Usage demo
from Robotic_Arm.rm_robot_interface import *
# Instantiate the RoboticArm class
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# Create the robotic arm connection and print the connection ID
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
# Set the finger angles of the dexterous hand
print(arm.rm_set_hand_angle([-1,100,200,300,400,500]))
arm.rm_delete_robot_arm()Set the speed of the dexterous handrm_set_hand_speed()
- Method prototype:
rm_set_hand_speed(self, speed: int) -> int:- Parameter description:
| Parameter | Type | Description |
|---|---|---|
speed | int | Finger speed, range: 1−1,000 |
- Return value: State codes executed by functions:
0 represents success. For other error codes, please refer to the API2 Error Codes.
- Usage demo
from Robotic_Arm.rm_robot_interface import *
# Instantiate the RoboticArm class
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# 创建机械臂连接,打印连接id
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
print(arm.rm_set_hand_speed(500))
arm.rm_delete_robot_arm()Set the force threshold of the dexterous handrm_set_hand_force()
- Method prototype:
rm_set_hand_force(self, force: int) -> int:- Parameter description:
| Parameter | Type | Description |
|---|---|---|
| force | int | Finger force, range: 1−1,000 |
- Return value: State codes executed by functions:
0 represents success. For other error codes, please refer to the API2 Error Codes.
- Usage demo
from Robotic_Arm.rm_robot_interface import *
# Instantiate the RoboticArm class
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# Create the robotic arm connection and print the connection ID
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
print(arm.rm_set_hand_force(500))
arm.rm_delete_robot_arm()Set the angle follow control of the dexterous hand rm_set_hand_follow_angle()
Set the follow angles of the dexterous hand, which has 6 degrees of freedom: 1. Little finger, 2. Ring finger, 3. Middle finger, 4. Index finger, 5. Thumb bending, 6. Thumb rotation. The control frequency is up to 50 Hz.
Definition of angles of the dexterous hand (int16):
- OYMotion: angle of joint 1 of the first finger *100.
- INSPIRE-ROBOTS: 0-2,000, obtain the relationship table between the driver stroke and angle by contacting technical support.
- OYMotion: angle of joint 1 of the first finger *100.
Warning
To use this feature, you need to contact technical support to receive a customized firmware upgrade package for the dexterous hand (OYMotion or INSPIRE-ROBOTS).
- Method prototype:
rm_set_hand_follow_angle(self, hand_angle: list[int], block:int) -> int- Parameter description:
| Parameter | Type | Description |
|---|---|---|
hand_angle | List[int] | Set the actions of each finger of the dexterous hand. hand_angle: array of finger angles, controlled according to the angles defined by the manufacturer of the dexterous hand. For example: 1. INSPIRE-ROBOTS has an angle range from 0 to +2,000; 2. OYMotion has an angle range from -32,768 to +32,767. |
block | int | Set the timeout for waiting for the robotic arm's state return in ms. 0: non-blocking mode. |
- The angle definitions and motion ranges for each degree of freedom of INSPIRE-ROBOTS are as follows.
| Angle | Legend | Range |
|---|---|---|
| Little finger Ring finger Middle finger Index finger | 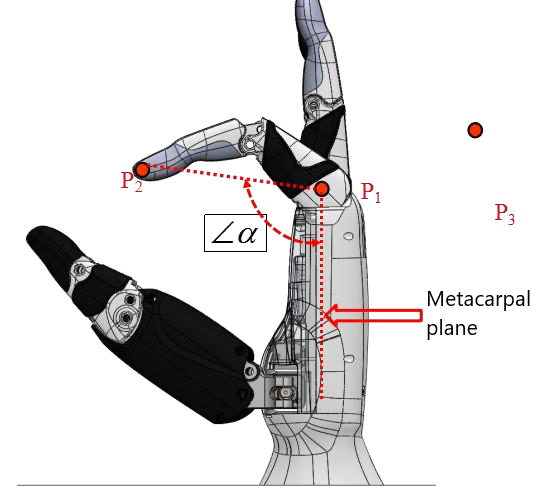 | 19°-176.7° |
| Thumb bending angle | 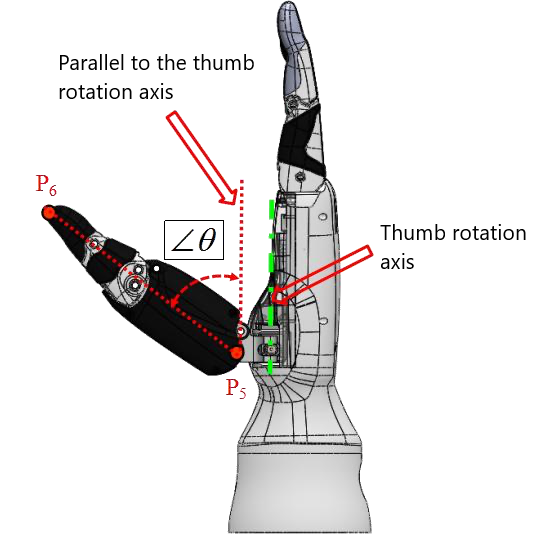 | -130-53.6° |
| Thumb rotation angle | 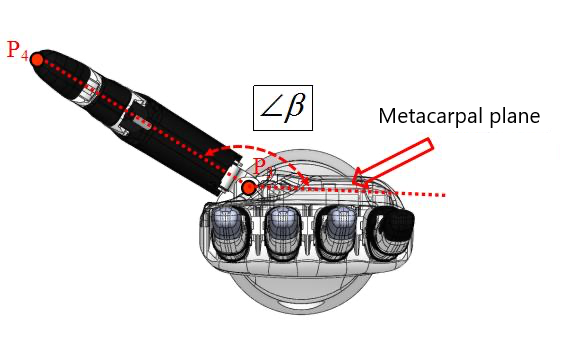 | 90°-165° |
- The angle definitions and motion ranges for each degree of freedom of OYMotion are as follows.
| Angle | Legend | Range |
|---|---|---|
| Index finger Middle finger Ring finger Little finger | 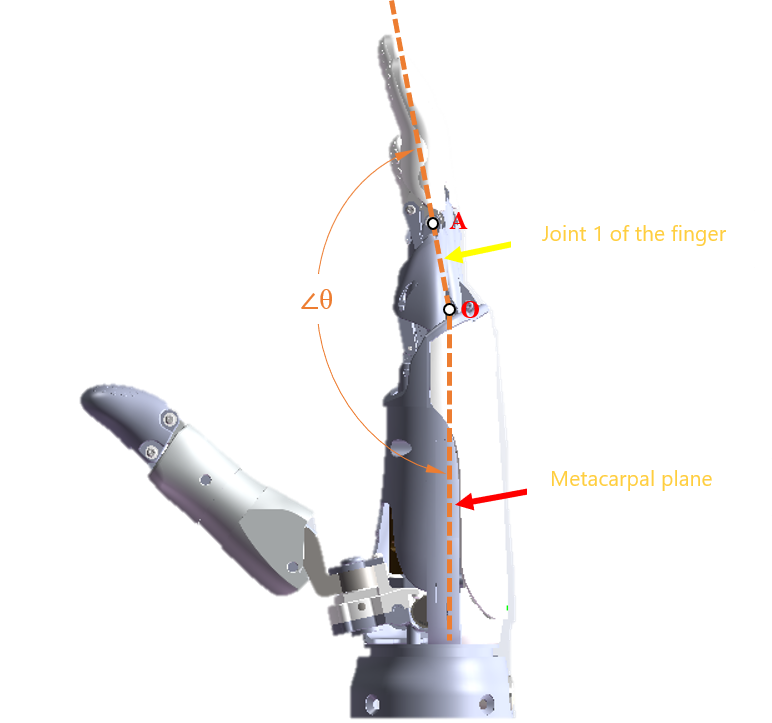 | 100.22°−178.37° 97.81°− 176.06° 101.38°−176.54° 98.84°−174.86° |
| Thumb bending angle | 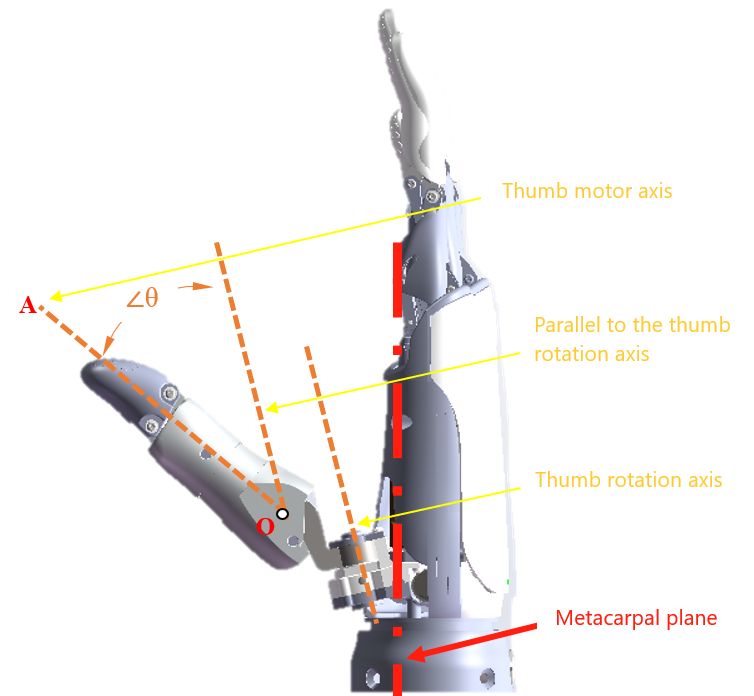 | 2.26° - 36.76° |
| Thumb rotation angle | 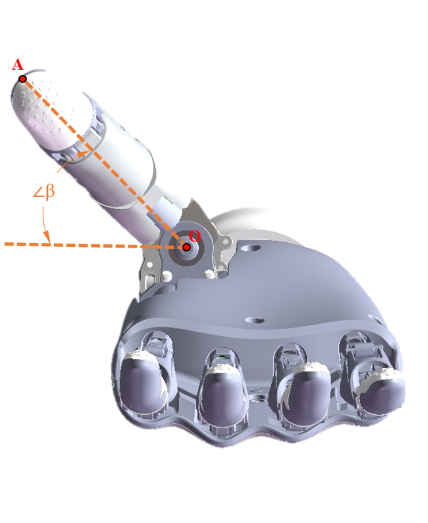 | 0° - 90° |
- Return value: State codes executed by functions:
0 represents success. For other error codes, please refer to the API2 Error Codes.
- Usage demo
from Robotic_Arm.rm_robot_interface import *
# Instantiate the RoboticArm class
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# Create the robotic arm connection and print the connection ID
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
# Set the angle follow control of the dexterous hand
print(arm.rm_set_hand_follow_angle([0,100,200,300,400,500], 100))
arm.rm_delete_robot_arm()Set the position follow control of the dexterous handrm_set_hand_follow_pos()
Warning
To use this feature, you need to contact technical support to receive a customized firmware upgrade package for the dexterous hand (OYMotion or INSPIRE-ROBOTS).
- Method prototype:
rm_set_hand_follow_pos(self, hand_pos: list[int], block:int) -> int- Parameter description:
| Parameter | Type | Description |
|---|---|---|
hand_pos | list[int] | Set the actions of each finger of the dexterous hand. hand_pos: array of finger positions, controlled according to the angles defined by the manufacturer of the dexterous hand. For example: 1. INSPIRE-ROBOTS has a position range from 0 to 1,000; 2. OYMotion has a position range from 0 to 65,535. |
block | int | Set the timeout for waiting for the robotic arm's state return in ms. 0: non-blocking mode. |
- Return value: State codes executed by functions:
0 represents success. For other error codes, please refer to the API2 Error Codes.
- Usage demo
from Robotic_Arm.rm_robot_interface import *
# Instantiate the RoboticArm class
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# Create the robotic arm connection and print the connection ID
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
# Set the position follow control of the dexterous hand
print(arm.rm_set_hand_follow_pos([0,100,200,300,400,500], 100))
arm.rm_delete_robot_arm()