C、C++:
Five-Finger Dexterous Hand ConfigurationhandControl The RealMan robotic arm is equipped with an INSPIRE-ROBOTS five-fingered dexterous hand at its end-effector, which can be configured through this interface. It includes settings for gesture actions, movement angles, speed, force control range, etc.
Move according to the target hand gesture sequence number of the dexterous handrm_set_hand_posture()
- Method prototype:
int rm_set_hand_posture(rm_robot_handle * handle,int posture_num,bool block,int timeout)Jump to rm_robot_handle for details of the structure
- Parameter description:
| Parameter | Type | Description |
|---|---|---|
handle | Input | Robotic arm handle. |
posture_num | Input | Gesture sequence number pre-stored in the dexterous hand, range: 1-40. |
block | Input | Blocking settings: multi-thread mode: 0: non-blocking mode, immediately return after sending commands; 1: blocking mode, return after the robotic arm reaches the target position or the planning fails. Single-thread mode: 0: non-blocking mode; other values: blocking mode, and timeout period setting according to the movement time, in s. |
timeout | Input | Timeout setting in blocking mode, in s. |
- Return value:
| Parameter | Type | Description |
|---|---|---|
| 0 | int | Success. |
| 1 | int | The controller returns false, indicating that the parameters are sent incorrectly or the robotic arm state is wrong. |
| -1 | int | The data transmission fails, indicating that a problem occurs during the communication. |
| -2 | int | The data reception fails, indicating that a problem occurs during the communication, or the controller has a return timeout. |
| -3 | int | The return value parse fails, indicating that the received data format is incorrect or incomplete. |
| -4 | int | The current in-position equipment verification fails, indicating the current in-position equipment is not a dexterous hand. |
| -5 | int | Timeout, no response returns. |
- Usage demo
//Set the dexterous hand to execute gesture 1 in blocking mode, and trigger a timeout if no response is received within 10 seconds
int posture_num = 1;
ret = rm_set_hand_posture(robot_handle,posture_num,true,10);Move according to the action sequence number of the dexterous handrm_set_hand_seq()
- Method prototype:
int rm_set_hand_seq(rm_robot_handle * handle,int seq_num,bool block,int timeout)Jump to rm_robot_handle for details of the structure
- Parameter description:
| Parameter | Type | Description |
|---|---|---|
handle | Input | Robotic arm handle. |
seq_num | Input | Action sequence number pre-stored in the dexterous hand, range: 1-40. |
block | Input | true indicates blocking mode, where the system waits for the dexterous hand to finish its movement before returning; falseindicates non-blocking mode, where the system returns immediately after sending the command. |
timeout | Input | Timeout setting in blocking mode, in s. |
- Return value:
| Parameter | Type | Description |
|---|---|---|
| 0 | int | Success. |
| 1 | int | The controller returns false, indicating that the parameters are sent incorrectly or the robotic arm state is wrong. |
| -1 | int | The data transmission fails, indicating that a problem occurs during the communication. |
| -2 | int | The data reception fails, indicating that a problem occurs during the communication, or the controller has a return timeout. |
| -3 | int | The return value parse fails, indicating that the received data format is incorrect or incomplete. |
| -4 | int | The current in-position equipment verification fails, indicating the current in-position equipment is not a dexterous hand. |
| -5 | int | Timeout, no response returns. |
- Usage demo
//Set the dexterous hand to execute action sequence 1 in blocking mode, and trigger a timeout if no response is received within 15 seconds
int posture_num = 1;
ret = rm_set_hand_seq(robot_handle,posture_num,true,15);Set the angles of the dexterous hand’s degrees of freedomrm_set_hand_angle()
Set the angles of the dexterous hand, which has 6 degrees of freedom: 1. Little finger, 2. Ring finger, 3. Middle finger, 4. Index finger, 5. Thumb bending, 6. Thumb rotation.
- Method prototype:
int rm_set_hand_angle(rm_robot_handle * handle,const int * hand_angle)Jump to rm_robot_handle for details of the structure
- Parameter description:
| Parameter | Type | Description |
|---|---|---|
handle | Input | Robotic arm handle. |
hand_angle | Input | Array of predefined finger angles, range: 0-1,000. Additionally, -1 indicates that no action will be performed for this degree of freedom, and the current state will be maintained. |
- Return value:
| Parameter | Type | Description |
|---|---|---|
| 0 | int | Success. |
| 1 | int | The controller returns false, indicating that the parameters are sent incorrectly or the robotic arm state is wrong. |
| -1 | int | The data transmission fails, indicating that a problem occurs during the communication. |
| -2 | int | The data reception fails, indicating that a problem occurs during the communication, or the controller has a return timeout. |
| -3 | int | The return value parse fails, indicating that the received data format is incorrect or incomplete. |
- Usage demo
//Set the actions of each finger of the dexterous hand
const int angle[6]= {-1,100,200,300,400,500};
ret = rm_set_hand_angle(robot_handle,angle);Set the speed of the dexterous handrm_set_hand_speed()
- Method prototype:
int rm_set_hand_speed(rm_robot_handle * handle,int speed)Jump to rm_robot_handle for details of the structure
- Parameter description:
| Parameter | Type | Description |
|---|---|---|
handle | Input | Robotic arm handle. |
speed | Input | Finger speed, range: 1-1,000. |
- Return value:
| Parameter | Type | Description |
|---|---|---|
| 0 | int | Success. |
| 1 | int | The controller returns false, indicating that the parameters are sent incorrectly or the robotic arm state is wrong. |
| -1 | int | The data transmission fails, indicating that a problem occurs during the communication. |
| -2 | int | The data reception fails, indicating that a problem occurs during the communication, or the controller has a return timeout. |
| -3 | int | The return value parse fails, indicating that the received data format is incorrect or incomplete. |
- Usage demo
//Set the speed of each finger of the dexterous hand
int speed = 500;
ret = rm_set_hand_speed(robot_handle,speed);Set the force threshold of the dexterous handrm_set_hand_force()
- Method prototype:
int rm_set_hand_force(rm_robot_handle * handle,int hand_force)Jump to rm_robot_handle for details of the structure
- Parameter description:
| Parameter | Type | Description |
|---|---|---|
handle | Input | Robotic arm handle. |
hand_force | Input | Finger force, range: 1-1,000. |
- Return value:
| Parameter | Type | Description |
|---|---|---|
| 0 | int | Success. |
| 1 | int | The controller returns false, indicating that the parameters are sent incorrectly or the robotic arm state is wrong. |
| -1 | int | The data transmission fails, indicating that a problem occurs during the communication. |
| -2 | int | The data reception fails, indicating that a problem occurs during the communication, or the controller has a return timeout. |
| -3 | int | The return value parse fails, indicating that the received data format is incorrect or incomplete. |
- Usage demo
//Set the force threshold of the dexterous hand to 500
int force = 500;
ret = rm_set_hand_force(robot_handle,force);Set the angle follow control of the dexterous handrm_set_hand_follow_angle()
Set the follow angles of the dexterous hand, which has 6 degrees of freedom: 1. Little finger, 2. Ring finger, 3. Middle finger, 4. Index finger, 5. Thumb bending, 6. Thumb rotation. The control frequency is up to 50 Hz. Definition of angles of the dexterous hand (int16): 1. OYMotion: angle of joint 1 of the first finger *100.
2. INSPIRE-ROBOTS: 0-2,000, obtain the relationship table between the driver stroke and angle by contacting technical support.
WARNING
To use this feature, you need to contact technical support to receive a customized firmware upgrade package for the dexterous hand (OYMotion or INSPIRE-ROBOTS).
- Method prototype:
int rm_set_hand_follow_angle(rm_robot_handle *handle, const int *hand_angle, int block);Jump to rm_robot_handle for details of the structure
- Parameter description:
| Parameter | Type | Description |
|---|---|---|
handle | Input | Robotic arm handle. |
hand_angle | Input | Set the actions of each finger of the dexterous hand. hand_angle represents the array of finger angles, controlled according to the angles defined by the manufacturer of the dexterous hand. For example: 1. INSPIRE-ROBOTS has an angle range from 0 to +2,000; 2. OYMotion has an angle range from -32,768 to +32,767. |
block | Input | Set the timeout for waiting for the robotic arm's status return in milliseconds. When set to 0, it operates in non-blocking mode. |
- The angle definitions and motion ranges for each degree of freedom of INSPIRE-ROBOTS are as follows.
| Angle | Legend | Range |
|---|---|---|
| Little finger Ring finger Middle finger Index finger | 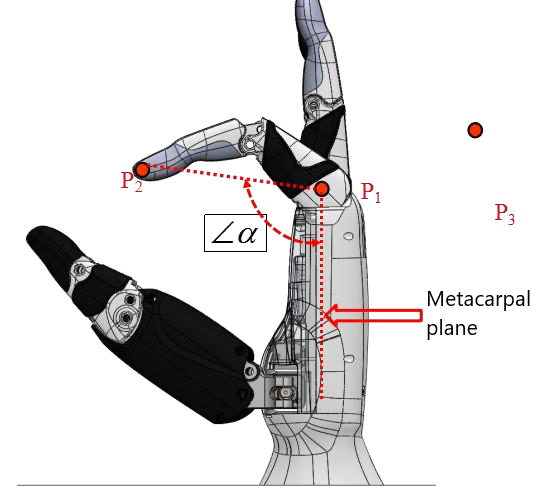 | 19°-176.7° |
| Thumb bending angle | 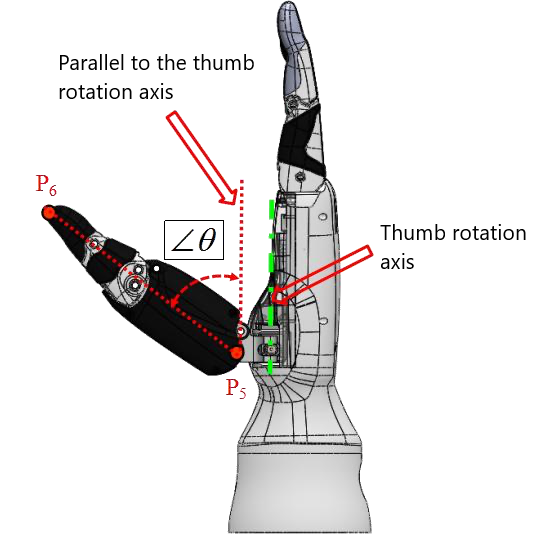 | -130-53.6° |
| Thumb rotation angle | 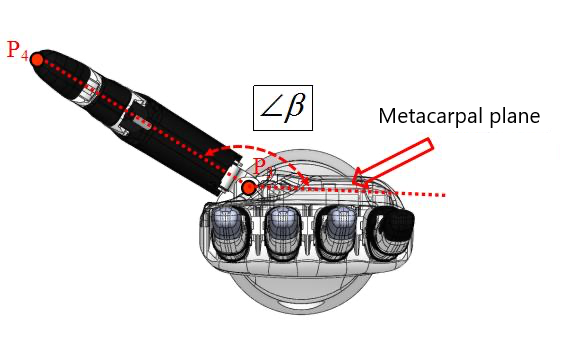 | 90°-165° |
- The angle definitions and motion ranges for each degree of freedom of OYMotion are as follows.
| Angle | Legend | Range |
|---|---|---|
| Index finger Middle finger Ring finger Little finger | 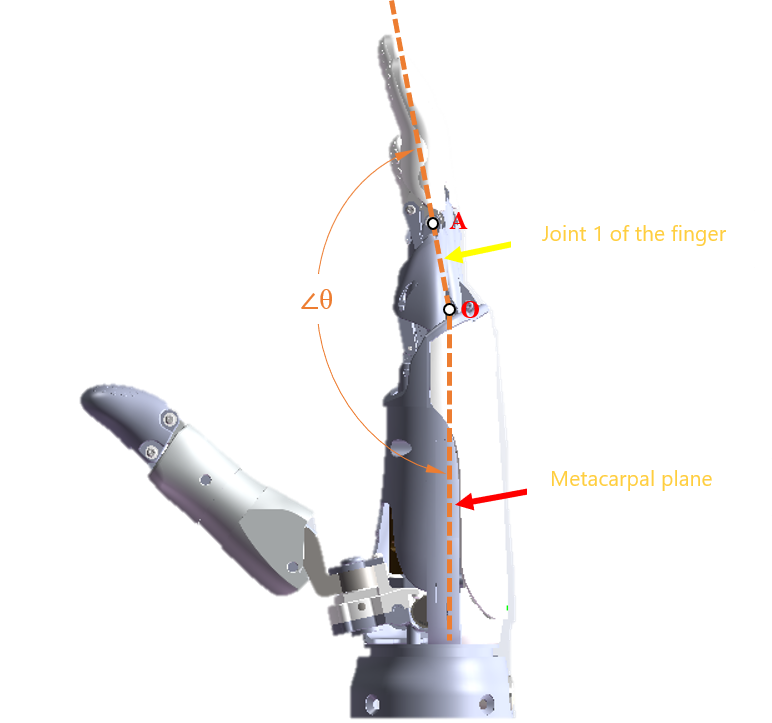 | 100.22°~178.37° 97.81° ~ 176.06° 101.38°~176.54° 98.84°~174.86° |
| Thumb bending angle | 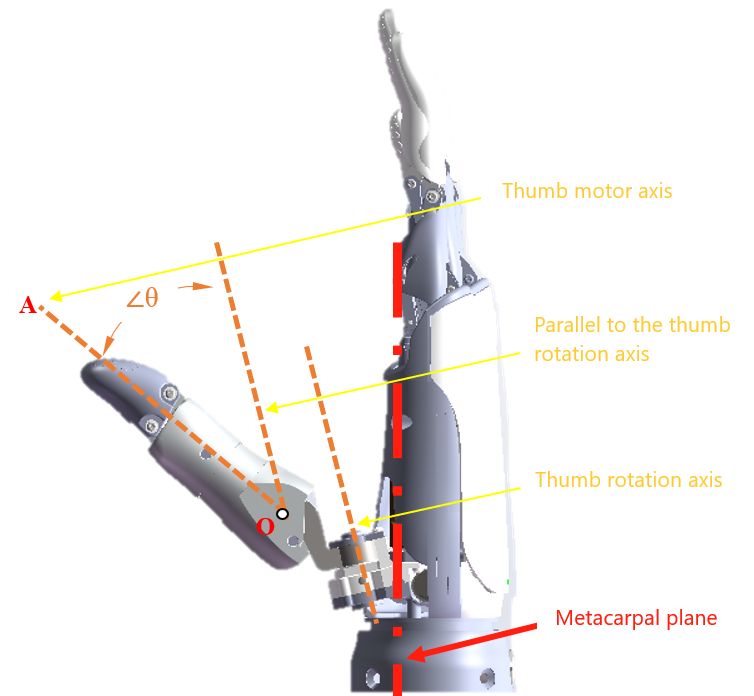 | 2.26° - 36.76° |
| Thumb rotation angle | 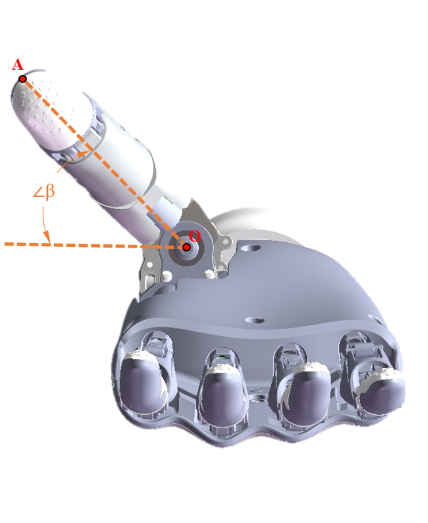 | 0° - 90° |
- Return value:
| Parameter | Type | Description |
|---|---|---|
| 0 | int | Success. |
| 1 | int | The controller returns false, indicating that the parameters are sent incorrectly or the robotic arm state is wrong. |
| -1 | int | The data transmission fails, indicating that a problem occurs during the communication. |
| -2 | int | The data reception fails, indicating that a problem occurs during the communication, or the controller has a return timeout. |
| -3 | int | The return value parse fails, indicating that the received data format is incorrect or incomplete. |
- Usage demo
// High-speed control of the dexterous hand, non-blocking mode
const int angle[6]= {0,100,200,300,400,500};
ret = rm_set_hand_follow_angle(robot_handle,angle,0);Set the position follow control of the dexterous handrm_set_hand_follow_pos()
Set the follow positions of the dexterous hand, which has 6 degrees of freedom: 1. Little finger, 2. Ring finger, 3. Middle finger, 4. Index finger, 5. Thumb bending, 6. Thumb rotation. The control frequency is up to 50 Hz.
WARNING
To use this feature, you need to contact technical support to receive a customized firmware upgrade package for the dexterous hand (OYMotion or INSPIRE-ROBOTS).
- Method prototype:
int rm_set_hand_follow_pos(rm_robot_handle *handle, const int *hand_pos, int block);Jump to rm_robot_handle for details of the structure
- Parameter description:
| Parameter | Type | Description |
|---|---|---|
handle | Input | Robotic arm handle. |
hand_pos | Input | Set the actions of each finger of the dexterous hand. hand_angle represents the array of finger positions, controlled according to the angles defined by the manufacturer of the dexterous hand. For example: 1. INSPIRE-ROBOTS has a position range from 0 to 1,000; 2. OYMotion has a position range from 0 to 65,535. |
block | Input | Set the timeout for waiting for the robotic arm's status return in milliseconds. When set to 0, it operates in non-blocking mode. |
- Return value:
| Parameter | Type | Description |
|---|---|---|
| 0 | int | Success. |
| 1 | int | The controller returns false, indicating that the parameters are sent incorrectly or the robotic arm state is wrong. |
| -1 | int | The data transmission fails, indicating that a problem occurs during the communication. |
| -2 | int | The data reception fails, indicating that a problem occurs during the communication, or the controller has a return timeout. |
| -3 | int | The return value parse fails, indicating that the received data format is incorrect or incomplete. |
- Usage demo
// High-speed control of the dexterous hand, non-blocking mode
const int pos[6]= {0,100,200,300,400,500};
ret = rm_set_hand_follow_pos(robot_handle,pos,0);