Start guide:
Robotic Arm System Information The system information includes the Controller Info, Joint Info, system log, error message, etc.
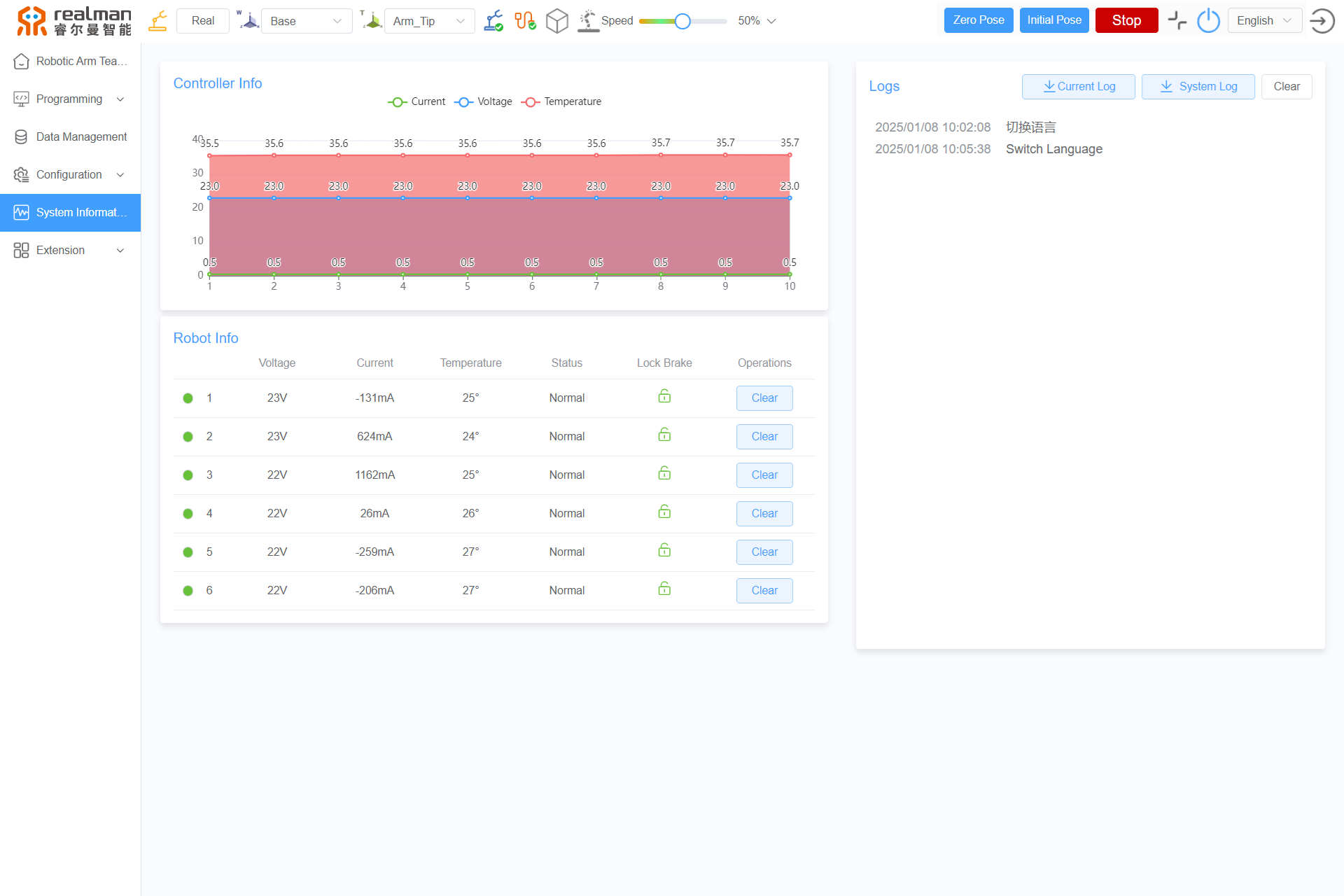
- System information: contains the controller's input voltage, output current, temperature, pose, and error code.
- Robotic arm information: contains the voltage, current, temperature, status, and error code for all six joints. After resolving joint errors, you must click the
Clearbutton to remove the error codes before enabling the joints to control their motions. - System log: contains all operational commands from the teach pendant interface, along with error types for the robotic arm and controller, displayed with timestamps in a text box. Click
Current Logto save the current log information locally. ClickSystem Logto download all robotic arm logs locally, supporting the complete logs of all programs. ClickClearto delete all displayed system logs.