Python:
五指灵巧手配置HandControl 该接口可用于设置五指灵巧手控制,下面是五指灵巧手控制HandControl的详细成员函数说明,包含了方法原型、参数说明、返回值说明和使用示例。
运行灵巧手目标手势序列号rm_set_hand_posture()
rm_set_hand_posture()- 方法原型:
python
rm_set_hand_posture(self, posture_num: int, block: bool, timeout: int) -> int:- 参数说明:
| 名称 | 类型 | 说明 |
|---|---|---|
posture_num | int | 预先保存在灵巧手内的手势序号,范围:1~40 |
block | bool | true 表示阻塞模式,等待灵巧手运动结束后返回false 表示非阻塞模式,发送后立即返回 |
timeout | int | 阻塞模式下超时时间设置,单位:秒 |
- 返回值: 函数执行的状态码:
| 参数 | 类型 | 说明 | 处理建议 |
|---|---|---|---|
| 0 | int | 成功。 | - |
| 1 | int | 控制器返回false,传递参数错误或机械臂状态发生错误。 | - 校验JSON指令: ①启用API的DEBUG日志,捕获原始JSON数据。 ②检查JSON语法:确保括号、引号、逗号等格式正确(可借助JSON校验工具)。 ③对照API文档,验证参数名称、数据类型及取值范围是否符合规范。 ④修正问题后重新发送指令,检查控制器返回的状态码及业务数据是否正常。 - 检查机械臂状态: ①查看机械臂控制器或日志中的实时报错信息(如硬件故障、超限等),根据提示复位、校准或排查硬件问题。 ②修正问题后重新发送指令,检查控制器返回的状态码及业务数据是否正常。 |
| -1 | int | 数据发送失败,通信过程中出现问题。 | 检查网络连通性: 使用ping/telnet等工具检测与控制器的通信链路是否正常。 |
| -2 | int | 数据接收失败,通信过程中出现问题或者控制器超时没有返回。 | - 检查网络连通性: 使用ping/telnet等工具检测与控制器的通信链路是否正常。 - 校验版本兼容性: ①核对控制器固件版本是否支持当前API功能,具体版本配套关系请参考版本变更说明。 ②若版本过低需升级控制器或使用适配的API版本。 |
| -3 | int | 返回值解析失败,接收到的数据格式不正确或不完整。 | 校验版本兼容性: ①核对控制器固件版本是否支持当前API功能,具体版本配套关系请参考版本变更说明。 ②若版本过低需升级控制器或使用适配的API版本。 |
| -4 | int | 当前到位设备校验失败,即当前到位设备不为夹爪。 | - 检测多设备并发控制:检查是否有其他设备给机械臂发送运动指令:包括机械臂、夹爪、灵巧手、升降机的运动; - 实时监听指令事件:注册回调函数 rm_get_arm_event_call_back:①捕获设备到位事件(如运动完成、超时等); ②通过回调参数 device 判断触发事件的具体设备类型。 |
| -5 | int | 超时未返回。 | - 检查超时时长设置:阻塞模式下,支持配置等待设备运动完成的超时时间,务必确保设置超时时间大于设备运动时间; - 检查网络连通性: 使用ping/telnet等工具检测与控制器的通信链路是否正常。 |
- 使用示例
python
from Robotic_Arm.rm_robot_interface import *
# 实例化RoboticArm类
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# 创建机械臂连接,打印连接id
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
print(arm.rm_set_hand_posture(1, True, 10))
arm.rm_delete_robot_arm()运行灵巧手动作序列号rm_set_hand_seq()
rm_set_hand_seq()- 方法原型:
python
rm_set_hand_seq(self, seq_num: int, block: bool, timeout: int) -> int:- 参数说明:
| 名称 | 类型 | 说明 |
|---|---|---|
seq_num | int | 预先保存在灵巧手内的手势序号,范围:1~40 |
block | bool | true 表示阻塞模式,等待灵巧手运动结束后返回false 表示非阻塞模式,发送后立即返回 |
timeout | int | 阻塞模式下超时时间设置,单位:秒 |
- 返回值: 函数执行的状态码:
| 参数 | 类型 | 说明 | 处理建议 |
|---|---|---|---|
| 0 | int | 成功。 | - |
| 1 | int | 控制器返回false,传递参数错误或机械臂状态发生错误。 | - 校验JSON指令: ①启用API的DEBUG日志,捕获原始JSON数据。 ②检查JSON语法:确保括号、引号、逗号等格式正确(可借助JSON校验工具)。 ③对照API文档,验证参数名称、数据类型及取值范围是否符合规范。 ④修正问题后重新发送指令,检查控制器返回的状态码及业务数据是否正常。 - 检查机械臂状态: ①查看机械臂控制器或日志中的实时报错信息(如硬件故障、超限等),根据提示复位、校准或排查硬件问题。 ②修正问题后重新发送指令,检查控制器返回的状态码及业务数据是否正常。 |
| -1 | int | 数据发送失败,通信过程中出现问题。 | 检查网络连通性: 使用ping/telnet等工具检测与控制器的通信链路是否正常。 |
| -2 | int | 数据接收失败,通信过程中出现问题或者控制器超时没有返回。 | - 检查网络连通性: 使用ping/telnet等工具检测与控制器的通信链路是否正常。 - 校验版本兼容性: ①核对控制器固件版本是否支持当前API功能,具体版本配套关系请参考版本变更说明。 ②若版本过低需升级控制器或使用适配的API版本。 |
| -3 | int | 返回值解析失败,接收到的数据格式不正确或不完整。 | 校验版本兼容性: ①核对控制器固件版本是否支持当前API功能,具体版本配套关系请参考版本变更说明。 ②若版本过低需升级控制器或使用适配的API版本。 |
| -4 | int | 当前到位设备校验失败,即当前到位设备不为夹爪。 | - 检测多设备并发控制:检查是否有其他设备给机械臂发送运动指令:包括机械臂、夹爪、灵巧手、升降机的运动; - 实时监听指令事件:注册回调函数 rm_get_arm_event_call_back:①捕获设备到位事件(如运动完成、超时等); ②通过回调参数 device 判断触发事件的具体设备类型。 |
| -5 | int | 超时未返回。 | - 检查超时时长设置:阻塞模式下,支持配置等待设备运动完成的超时时间,务必确保设置超时时间大于设备运动时间; - 检查网络连通性: 使用ping/telnet等工具检测与控制器的通信链路是否正常。 |
- 使用示例
python
from Robotic_Arm.rm_robot_interface import *
# 实例化RoboticArm类
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# 创建机械臂连接,打印连接id
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
print(arm.rm_set_hand_seq(1, True, 15))
arm.rm_delete_robot_arm()设置灵巧手各自由度角度rm_set_hand_angle()
- 方法原型:
python
rm_set_hand_angle(self, hand_angle: list[int]) -> int:- 参数说明:
| 名称 | 类型 | 说明 |
|---|---|---|
seq_num | int | 预先保存在灵巧手内的手势序号,范围:1~40 |
block | bool | true 表示阻塞模式,等待灵巧手运动结束后返回false 表示非阻塞模式,发送后立即返回 |
timeout | int | 阻塞模式下超时时间设置,单位:秒 |
- 返回值: 函数执行的状态码:
0代表成功,其他错误码请参考API2错误代码。
- 使用示例
python
from Robotic_Arm.rm_robot_interface import *
# 实例化RoboticArm类
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# 创建机械臂连接,打印连接id
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
# 设置灵巧手各手指角度
print(arm.rm_set_hand_angle([-1,100,200,300,400,500]))
arm.rm_delete_robot_arm()设置灵巧手速度rm_set_hand_speed()
- 方法原型:
python
rm_set_hand_speed(self, speed: int) -> int:- 参数说明:
| 名称 | 类型 | 说明 |
|---|---|---|
speed | int | 手指速度,范围:1~1000 |
- 返回值: 函数执行的状态码:
0代表成功,其他错误码请参考API2错误代码。
- 使用示例
python
from Robotic_Arm.rm_robot_interface import *
# 实例化RoboticArm类
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# 创建机械臂连接,打印连接id
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
print(arm.rm_set_hand_speed(500))
arm.rm_delete_robot_arm()设置灵巧手力阈值rm_set_hand_force()
- 方法原型:
python
rm_set_hand_force(self, force: int) -> int:- 参数说明:
| 名称 | 类型 | 说明 |
|---|---|---|
| force | int | 手指力,范围:1~1000 |
- 返回值: 函数执行的状态码:
0代表成功,其他错误码请参考API2错误代码。
- 使用示例
python
from Robotic_Arm.rm_robot_interface import *
# 实例化RoboticArm类
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# 创建机械臂连接,打印连接id
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
print(arm.rm_set_hand_force(500))
arm.rm_delete_robot_arm()设置灵巧手角度跟随控制rm_set_hand_follow_angle()
设置灵巧手跟随角度,灵巧手有6个自由度,从1~6分别为小拇指,无名指,中指,食指,大拇指弯曲,大拇指旋转,最高50Hz的控制频率。
灵巧手角度的定义(int16):
- 傲意:第一指关节1的角度*100。
- 因时:0-2000,通过联系技术支持得到驱动器行程与角度关系表。
- 傲意:第一指关节1的角度*100。
注意
如果要使用此功能,需要联系技术支持发送定制的灵巧手固件升级包(傲意或者因时)。
- 方法原型:
python
rm_set_hand_follow_angle(self, hand_angle: list[int], block:int) -> int- 参数说明:
| 名称 | 类型 | 说明 |
|---|---|---|
hand_angle | List[int] | 设置灵巧手各手指动作,hand_angle表示手指角度数组,按照灵巧手厂商定义的角度做控制,例如: 1. 因时的角度范围为0到+2000; 2. 傲意的角度范围为-32768到+32767。 |
block | int | 设置等待机械臂返回状态超时时间,设置0时为非阻塞模式,单位为毫秒。 |
- 因时各自由度的角度定义和运动范围说明如下。
| 角度 | 图例说明 | 范围 |
|---|---|---|
| 小拇指 无名指 中指 食指 | 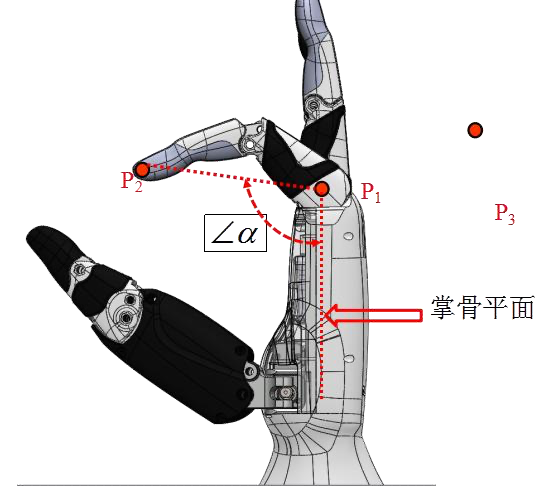 | 19°~176.7° |
| 大拇指弯曲角度 | 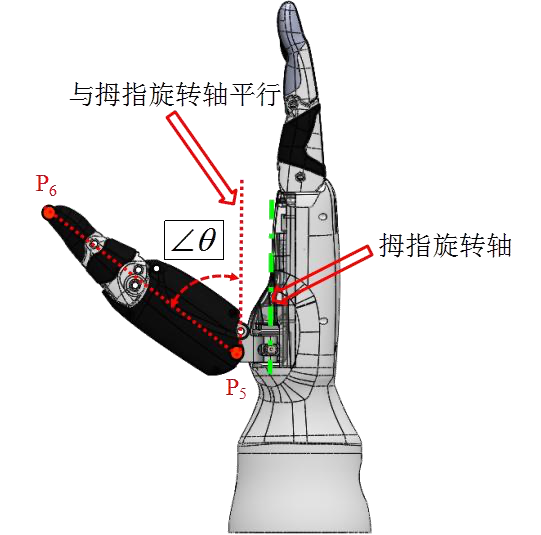 | -130~53.6° |
| 大拇旋转曲角度 | 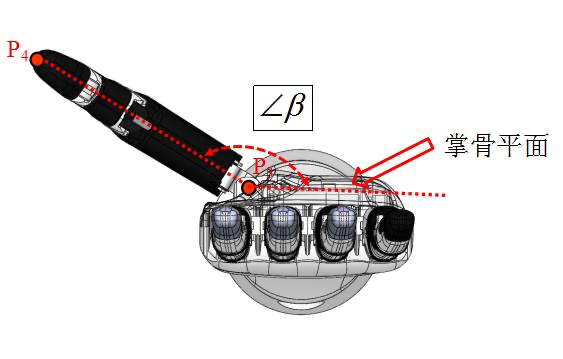 | 90°~165° |
- 傲意各自由度的角度定义和运动范围说明如下。
| 角度 | 图例说明 | 范围 |
|---|---|---|
| 食指 中指 无名指 小拇指 | 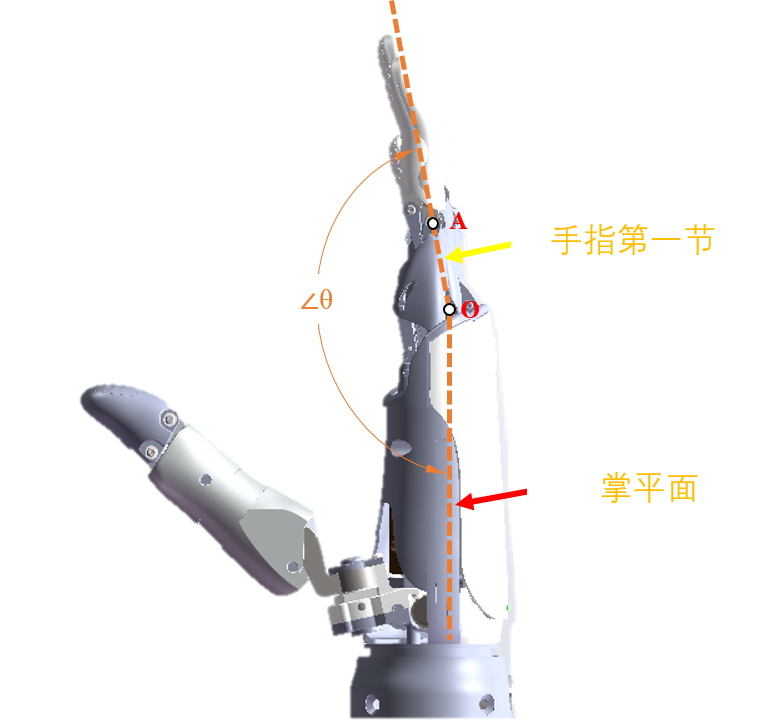 | 100.22°~178.37° 97.81° ~ 176.06° 101.38°~176.54° 98.84°~174.86° |
| 大拇指弯曲角度 | 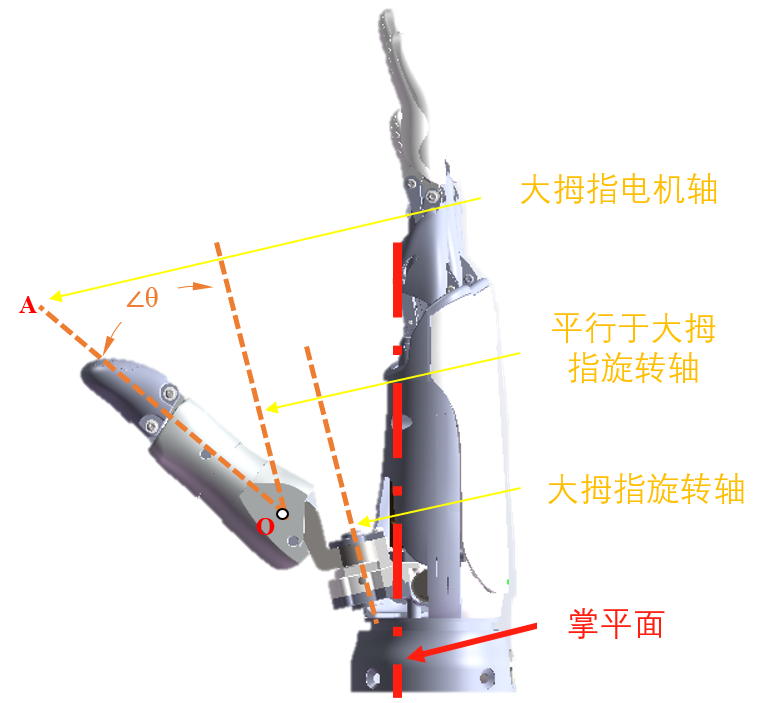 | 2.26° ~ 36.76° |
| 大拇旋转曲角度 | 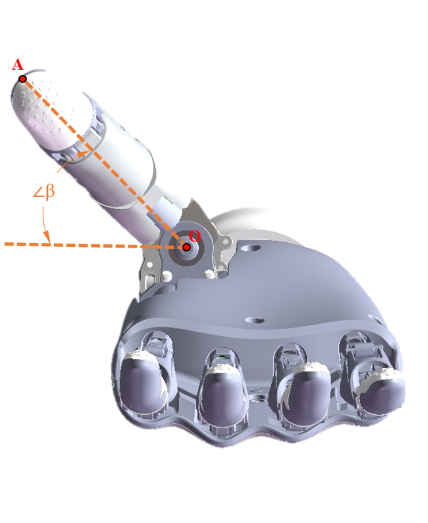 | 0° ~ 90° |
- 返回值: 函数执行的状态码:
0代表成功,其他错误码请参考API2错误代码。
- 使用示例
python
from Robotic_Arm.rm_robot_interface import *
# 实例化RoboticArm类
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# 创建机械臂连接,打印连接id
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
# 灵巧手角度跟随控制
print(arm.rm_set_hand_follow_angle([0,100,200,300,400,500], 100))
arm.rm_delete_robot_arm()设置灵巧手位置跟随控制rm_set_hand_follow_pos()
注意
如果要使用此功能,需要联系技术支持发送定制的灵巧手固件升级包(傲意或者因时)。
- 方法原型:
python
rm_set_hand_follow_pos(self, hand_pos: list[int], block:int) -> int- 参数说明:
| 名称 | 类型 | 说明 |
|---|---|---|
hand_pos | list[int] | 设置灵巧手各手指动作,hand_pos表示手指位置数组,按照灵巧手厂商定义的角度做控制,例如: 1. 因时的位置范围为0-1000; 2. 傲意的位置范围为0-65535。 |
block | int | 设置等待机械臂返回状态超时时间,设置0时为非阻塞模式,单位为毫秒。 |
- 返回值: 函数执行的状态码:
0代表成功,其他错误码请参考API2错误代码。
- 使用示例
python
from Robotic_Arm.rm_robot_interface import *
# 实例化RoboticArm类
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# 创建机械臂连接,打印连接id
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
# 灵巧手位置跟随控制
print(arm.rm_set_hand_follow_pos([0,100,200,300,400,500], 100))
arm.rm_delete_robot_arm()