入门指南:
机械臂配置 基础配置
切换语言
点击目标语言按钮,可切换至目标语言,目前支持中文、英文。

IP模式设置
在机械臂与示教器连接成功的基础上,可在“配置 > 基础配置 > IP模式设置”模块中设置机械臂IP。

在示教器IP模式设置中,可直接设置机械臂IP,可在IP文本框中输入IP,如“192.168.1.19”,输入完毕之后点击设置按钮,可直接设置机械臂IP,此IP设置结束,此设置需重启机械臂生效。如需恢复“192.168.1.18”IP地址,可点击重置按钮,机械臂IP即可恢复“192.168.1.18”IP地址,此设置需重启机械臂生效。(如修改过机械臂IP,则登录示教器界面需输入更新过后的IP)
点击设置后会自动下载设置的IP,请注意保存以防止遗忘IP。
安装信息
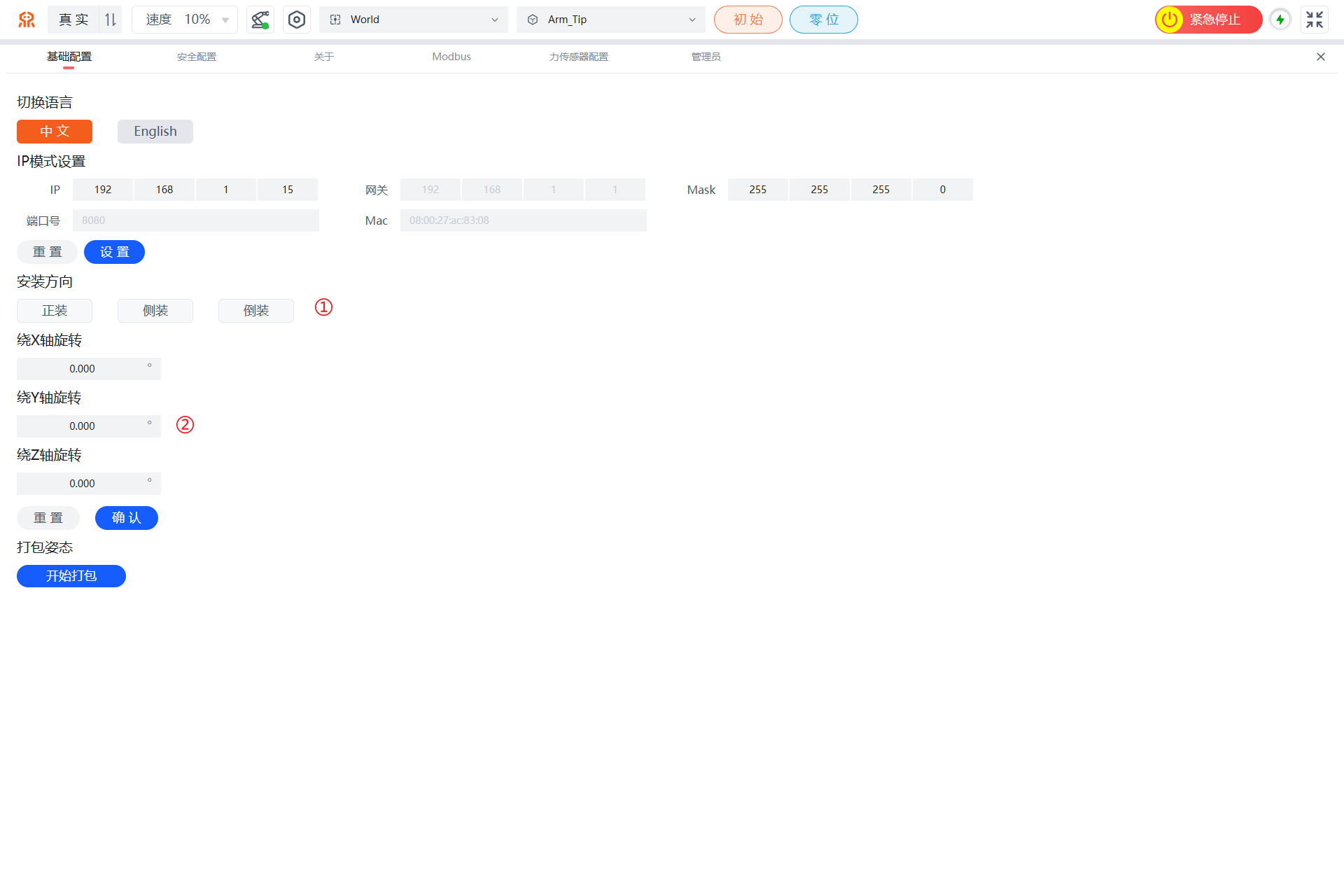
机器人安装信息指安装角度设定。在该界面的模型窗口可实时查看设定的安装角度是否与需求角度一致。区域1可快速设定常用安装方向,包括正装、侧装以及倒装。区域2为通过调节X轴、Y轴和Z轴角度进行安装角度设定。设置完成后,点击确定按钮进行保存。
打包姿态示例
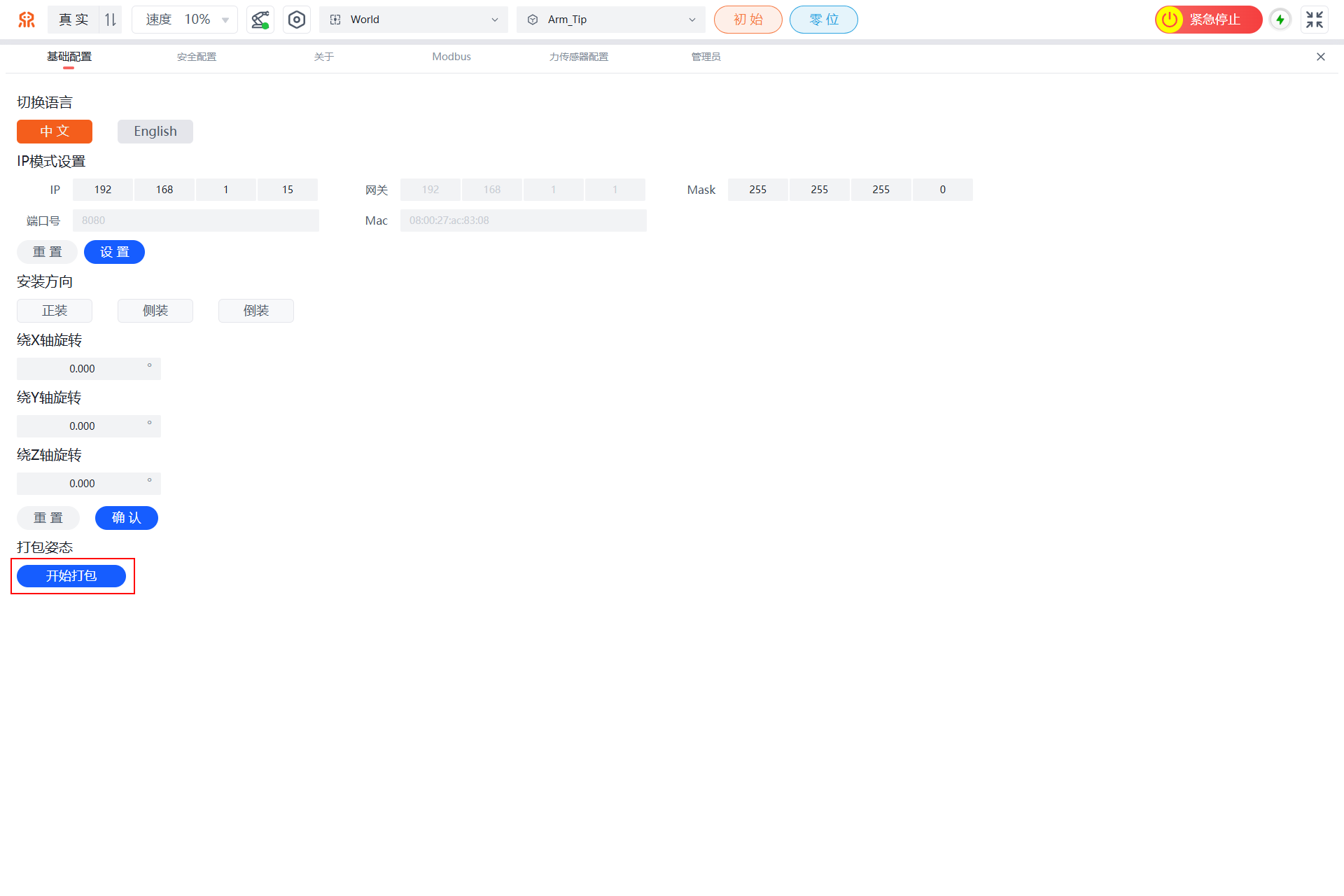
机器人使用完成后,需要重新装箱时。在控制器内部已经保存机器人装箱姿态,长按打包姿态模块的开始打包按钮,机器人自动运动至装箱姿态,机器人停止运动时,打包姿态完成。
安全配置
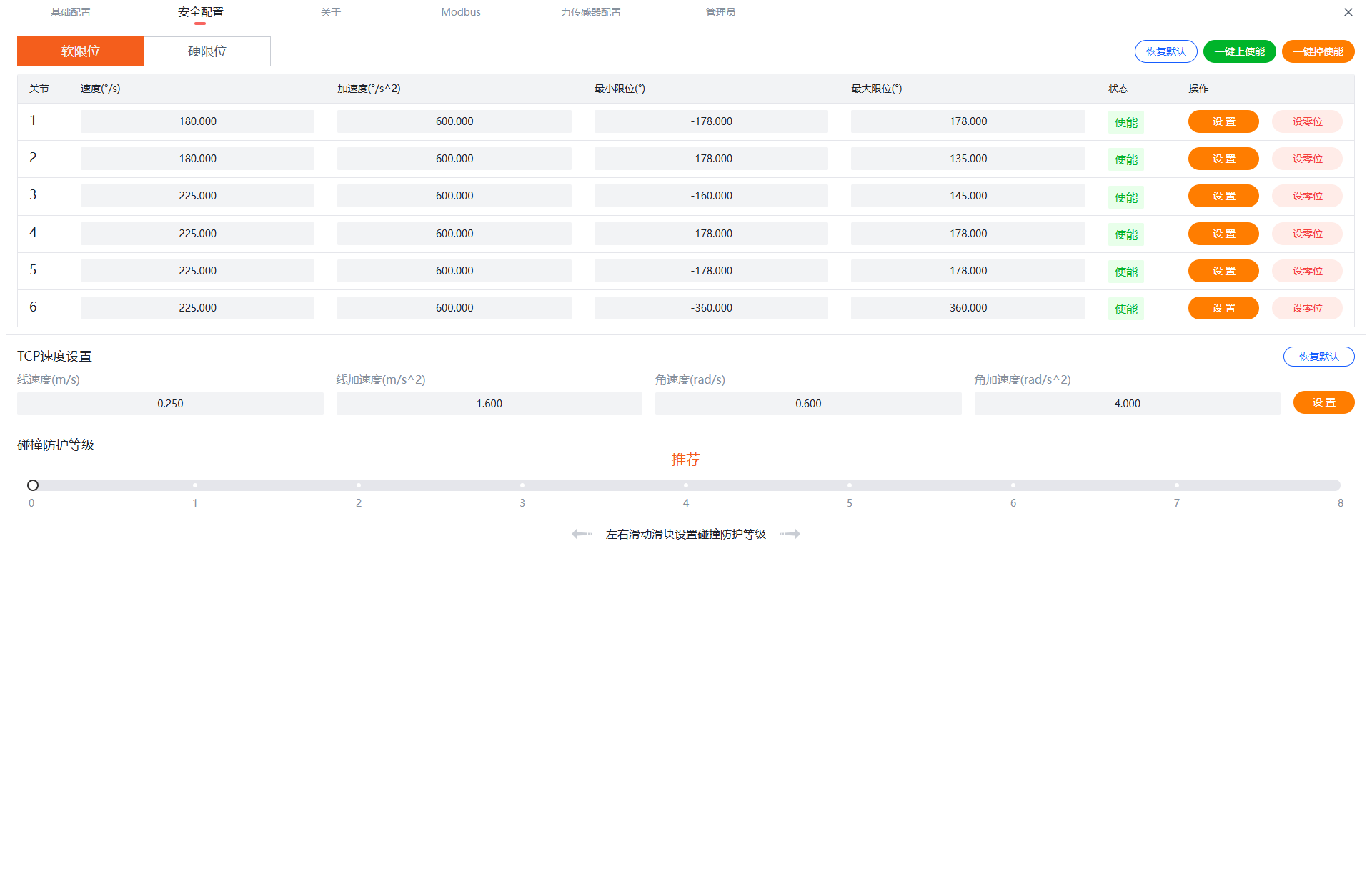
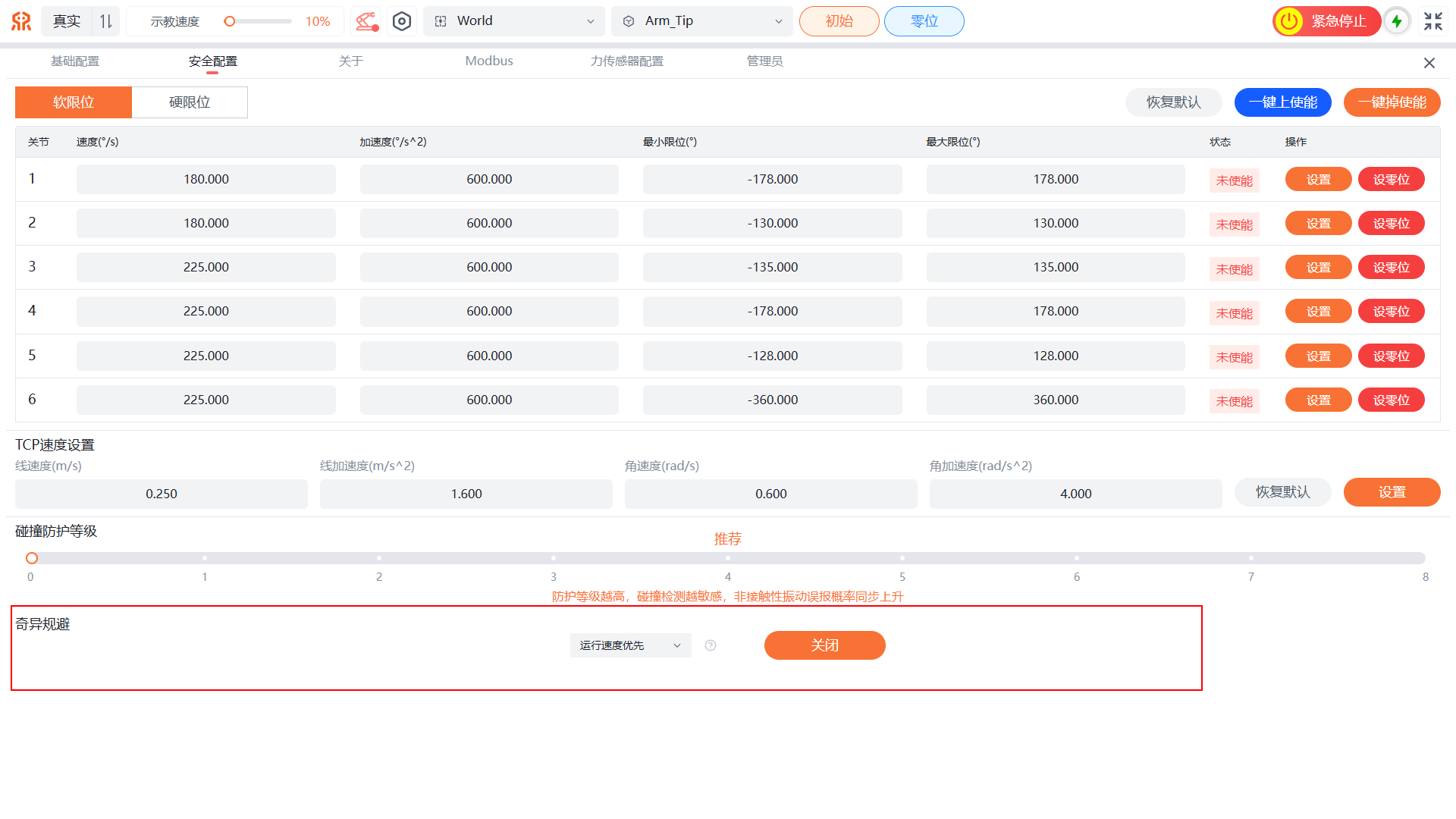
安全配置界面主要对机器人的关节、末端TCP速度限制和防碰撞参数进行配置。如下图所示:
关节配置
在页面上方显示关节1~6的参数信息,分别对应机器人从下到上的六个关节。示教器与机器人建立连接后,关节的最大速度、加速度、最小限位、最大限位和状态信息会自动显示在对应位置。

- 速度:关节的最大转速,单位°/s,关节1和关节2最大180°/s,其他关节最大225°/s。
- 加速度:关节的最大加速度,单位°/s^2,最大值为600°/s^2。出厂默认值600°/s^2,是各方面综合状态最好的数据,不建议用户更改。
- 最小限位:关节的达到的最小位置,单位:度。
- 最大限位:关节的达到的最大位置,单位:度。
- 状态:关节当前使能状态。
- 操作:支持对关节进行设置和设零位操作。
一键上使能按钮和一键掉使能按钮分别对所有关节发送上使能和掉使能指令。
设置关节
注意
睿尔曼机械臂在出厂前所有参数都已经配置到最佳状态,一般不建议用户修改关节的底层参数。若用户确需修改,首先应使机械臂处于非使能状态,然后再发送修改参数指令,参数设置成功后,发送关节恢复使能指令。需要注意的是,关节恢复使能时,用户需要保证关节处于静止状态,以免上使能过程中关节发生定位报错。关节正常上使能后,用户方可控制关节运动。更改时,设置的关节最大加速度与最大转速的比值需要≥1.5倍,否则可能出现运动异常。
参考掉使能,完成关节1掉使能。
根据需要修改关节1的最大速度、加速度、最小限位、最大限位参数。

- 点击关节1操作列的
设置按钮,完成关节1的参数设置。 - 参考上使能,完成关节1上使能。
设零位
简介:
关节在掉使能状态下,点击设零位按钮后,将指定关节当前位置设置为零位,设置完成后该关节仍处于掉使能状态。点击上使能按钮,重新给该关节上使能,才可以控制关节运动。
机器人每个关节都有一个机械原点位置(如下图所示),零位姿态即为各关节均在机器人原点位置时的位姿。当机器人在零位姿态时,机械原点位置标记不对齐,则需要手动将机器人设置回机械原点位置。零位姿态时,机器人的状态如下图所示:
当更换机器人关节后,必须重新设置对应关节的零位。
注意
并非所有机器人均支持该功能,设定前先与睿尔曼智能科技(北京)有限公司确认。
操作步骤:
本文以设置关节1的零位为例(其它关节设零位亦可参考)。
- 参考掉使能,完成关节1掉使能。
- 将关节1旋转到机械原点位置(关节缝隙两侧的凹槽完全对应,为机械原点位置)

- 点击关节1操作列的
设零位按钮,并在弹出的提示框中,点击确认,完成关节1的零位设置。 - 参考上使能,完成关节1上使能。
TCP速度限制
该部分主要对机器人末端的线速度、线加速度、角速度和角加速度进行设置。示教器与机器人控制器建立网络连接后,该部分会自动更新当前机器人的TCP参数,用户可手动修改参数并下发。
点击默认值按钮,机器人TCP参数恢复默认值。末端线速度:0.25m/s,末端加速度:1.6m/s^2,末端角速度:0.6rad/s,末端角加速度:4rad/s^2。
注意
建议使用默认TCP速度,如需更改,设置的机械臂末端最大加速度与最大速度的比值需要≥3,否则可能出现运动异常。
碰撞防护等级
该部分主要对机器人的碰撞等级进行设置,等级级别为0~8,代表机器人碰撞灵敏度的级别,等级越高,对碰撞越敏感。机器人上电默认碰撞等级为0,即不对碰撞做检测。

注意
用户在设置碰撞防护等级时,应该合理选择,等级越高,机器人检测到误碰撞的概率就越高,如无特殊需求,建议用户可将碰撞等级设置在4左右;另外,如果机器人末端改变工具和负载,需在工具坐标系标定时设定工具的质量和质心参数(工具坐标系标定过程参照)以匹配正确的动力学模型。
奇异规避
目前仅支持运行速度优先模式进行奇异规避,本模式下轨迹运行过程中,机械臂将在奇异点附近通过改变部分关节姿态避开奇异点,保持运动速度,轨迹精度在奇异点附近会有一定降低。
注意
- 奇异规避功能目前仅支持六自由度机械臂且默认为关闭状态。
- 避奇异对示教不生效。
- 对于轨迹要求精准的场景,不建议使用避奇异,因为避奇异会自动修改轨迹。
工具坐标系标定
工具坐标系标定如下图所示,区域1为显示当前所有工具坐标系及工具位姿信息,区域2为手动设置工具坐标系信息,区域3为自动标定当前工具坐标系。
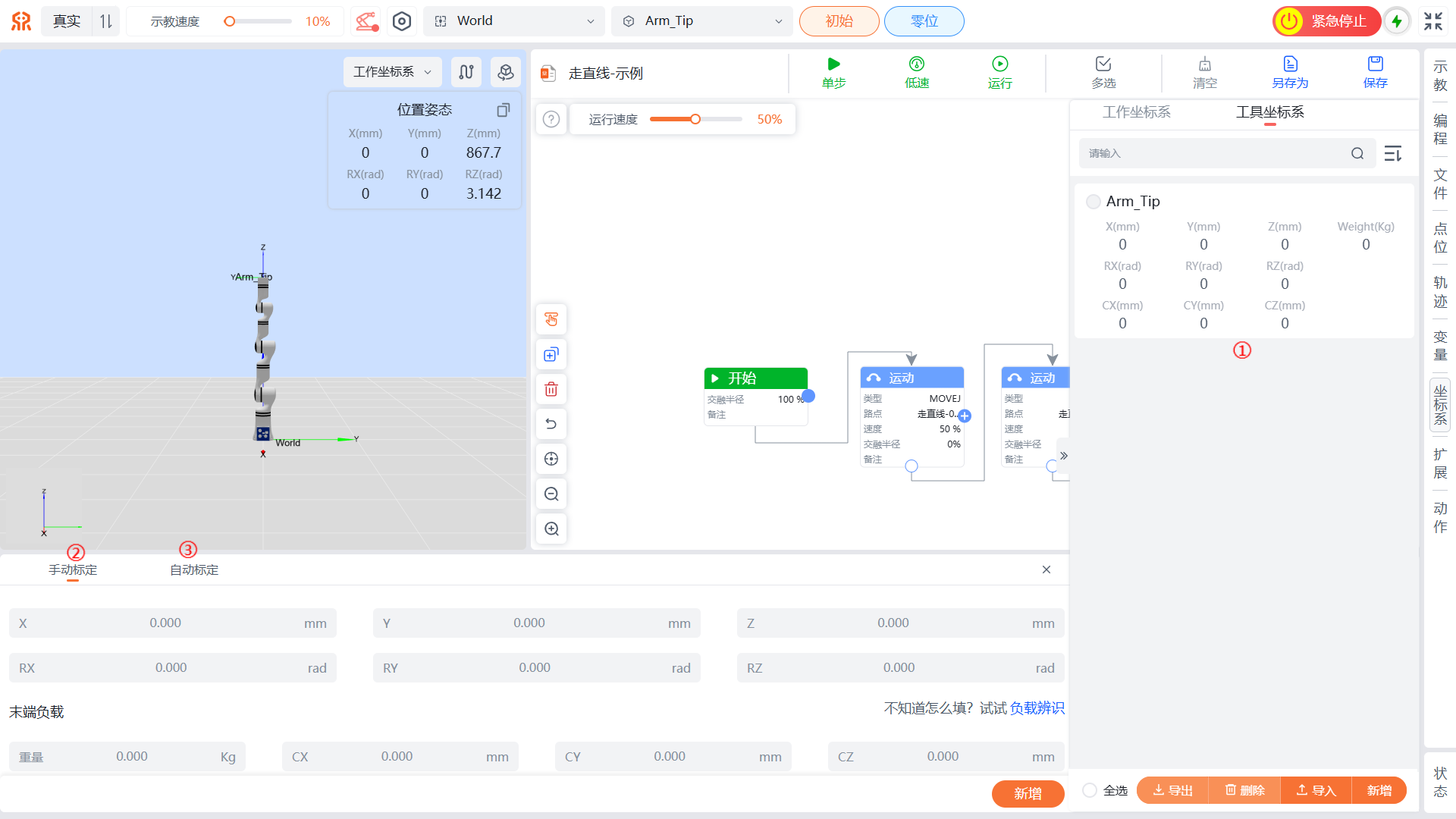
工具坐标系显示
页面右侧展示当前机器人已经建立的所有工具坐标系名称及位姿参数。若要删除某一工具,选中目标工具后,点删除按钮即可。删除完成后,机器人进入末端法兰坐标系工作。另外,Arm_Tip(机器人末端工具坐标系)不可删除。
手动标定
当用户知道工具相对于机器人末端法兰中心的准确的相对位姿后,可通过手动输入信息,直接设置工具坐标系。
在
坐标系>工具坐标系页面,点击页面右下方的新增,默认打开手动标定配置页面。在
手动标定配置页面,定义X、Y、Z、RX、RY、RZ信息。在
手动标定配置页面,定义末端负载信息。支持通过自动辨识、手动辨识进行负载辨识。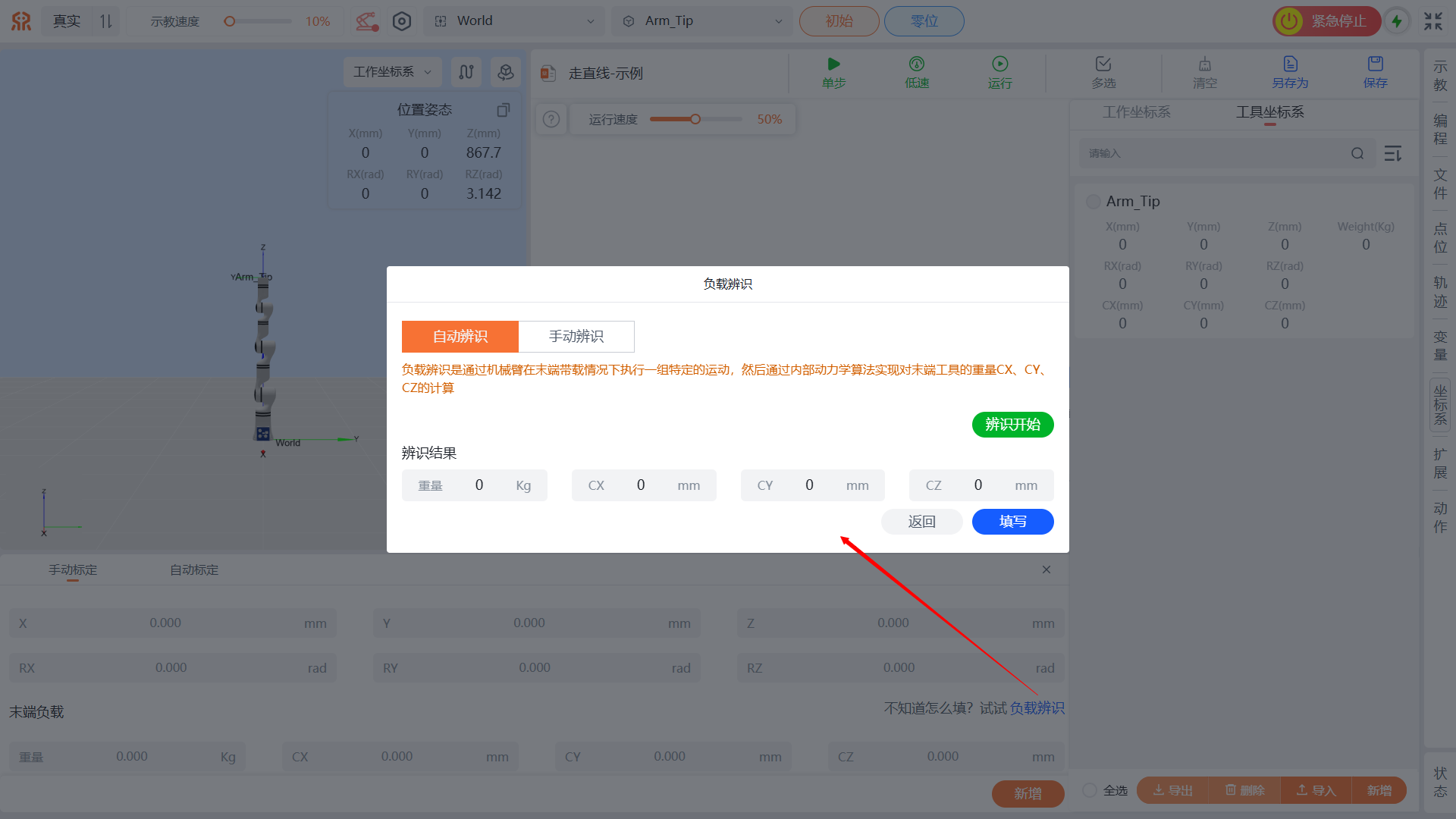
- 自动辨识:执行机械臂默认指定的一组末端姿态,直接点击
辨识开始自动进行负载辨识。 - 手动辨识:手动指定四个机械臂末端姿态,四个点的末端姿态变化需要尽量大,变化越大,辨识结果越准确,变化过小时,辨识可能不成功,末端姿态设置完成后,点击
辨识开始进行负载辨识。 - 辨识完成后,点击对话框右下方的
填写。
- 自动辨识:执行机械臂默认指定的一组末端姿态,直接点击
说明
- 负载辨识:通过机械臂在末端带载情况下执行一组特定运动,然后通过内部动力学算法实现对末端工具的重量、CX、CY、CZ的计算,最终计算出的末端负载会与实际称重得出的重量存在0.5KG左右偏差属正常现象。
- 若末端夹具长度较长在进行负载辨识运动时可能会与机械臂发生碰撞。
- 信息定义完成后,点击页面下方的
新增,在弹出的对话框中定义坐标系名称信息,完成工具坐标系标定的新增。新增的工具坐标系标定在页面右侧的列表中展示。
自动标定
可通过六点法标定当前工具坐标系。
在
坐标系>工具坐标系页面,点击页面右下方的新增,点击自动标定页签,打开自动标定配置页面。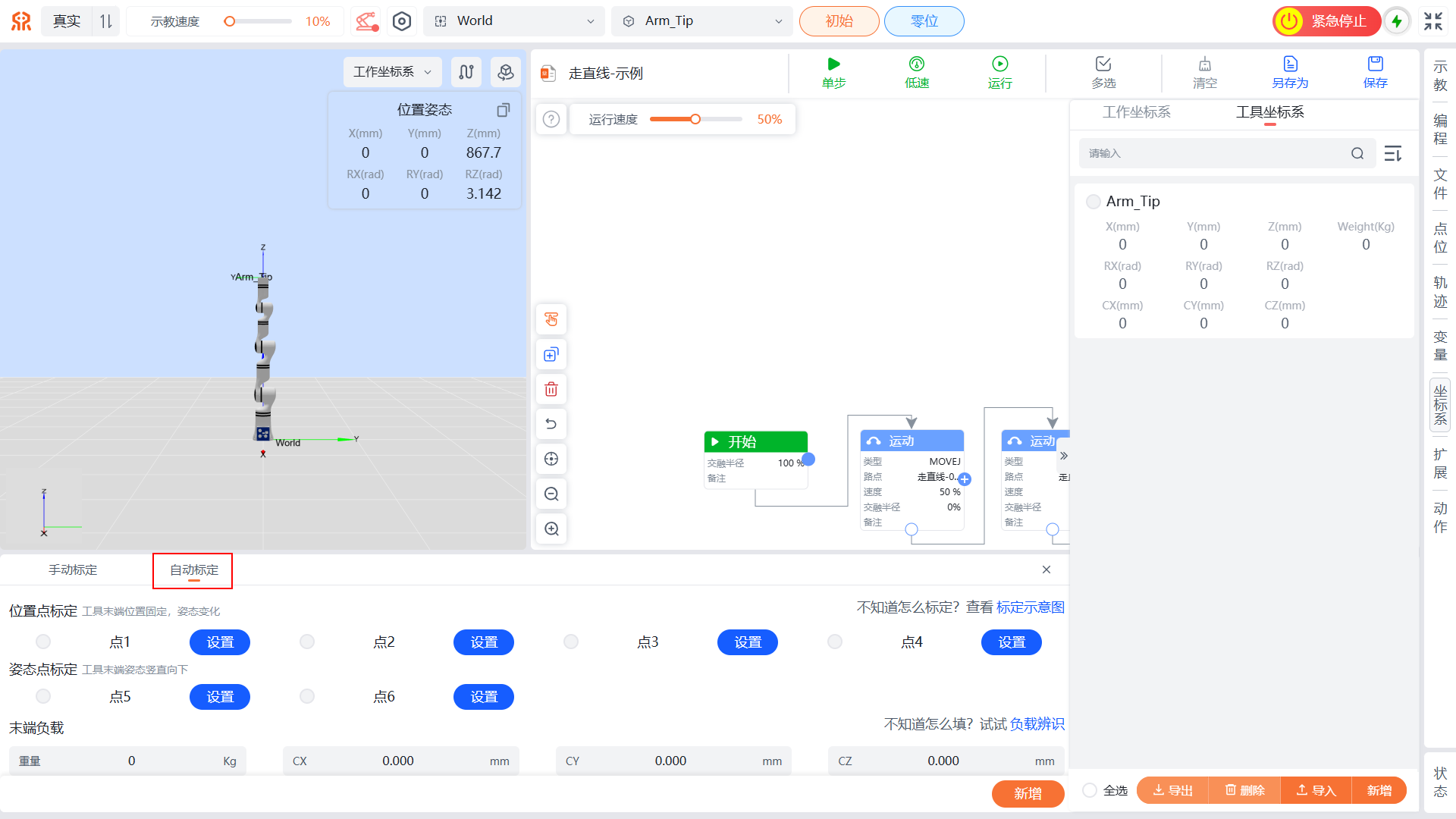
定义
位置点标定、姿态点标定信息:将机器人工具分别以6个姿态接触工具参考点(该参考点要求末端尖锐,并且竖直向上放置于机器人工作范围内)。6点法标定内容规则如下所示:
| 序号 | 名称 |
|---|---|
| 1 |  |
| 2 |  |
| 3 | 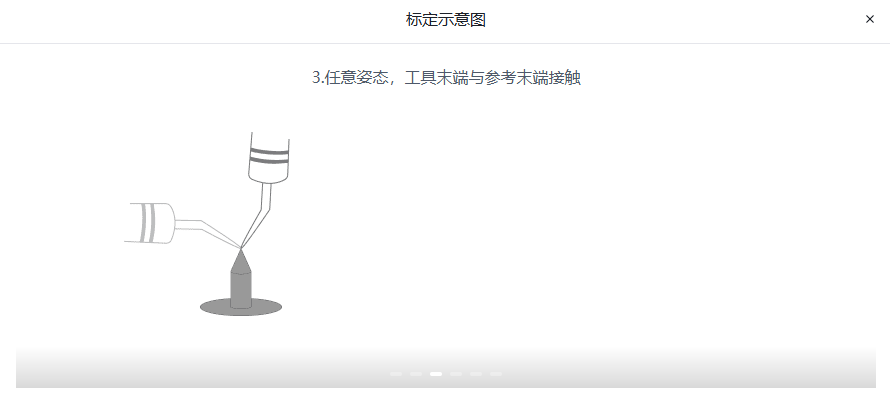 |
| 4 | 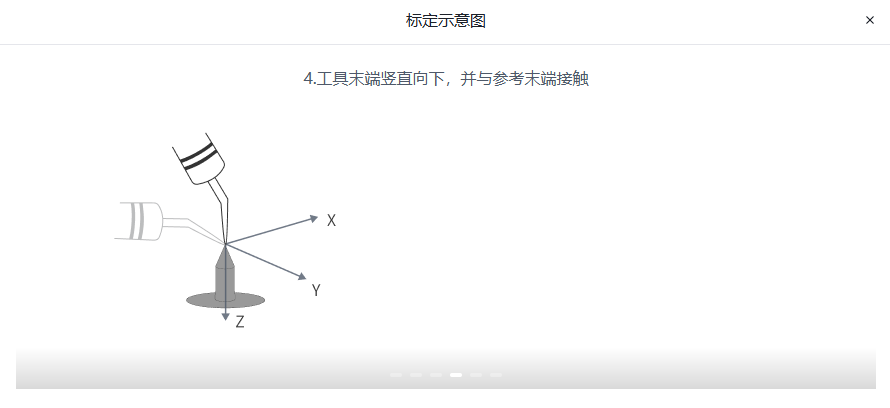 |
| 5 | 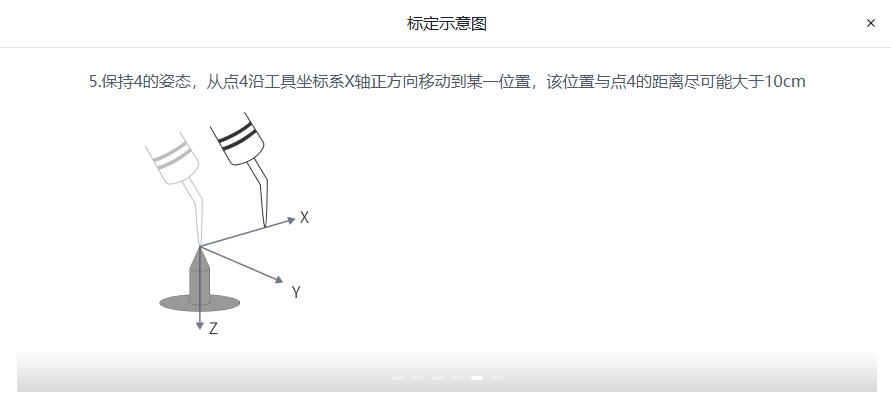 |
| 6 | 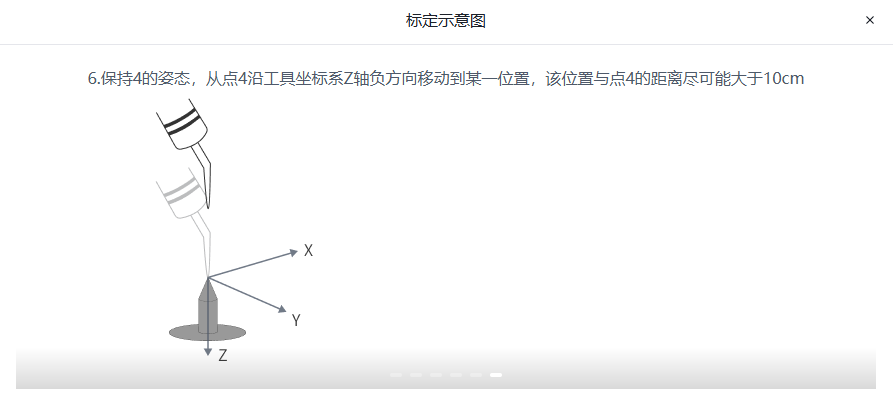 |
注意
前4个点的姿态差距应尽可能大,不要找相同的点。
定义
末端负载信息。支持通过自动辨识、手动辨识进行负载辨识。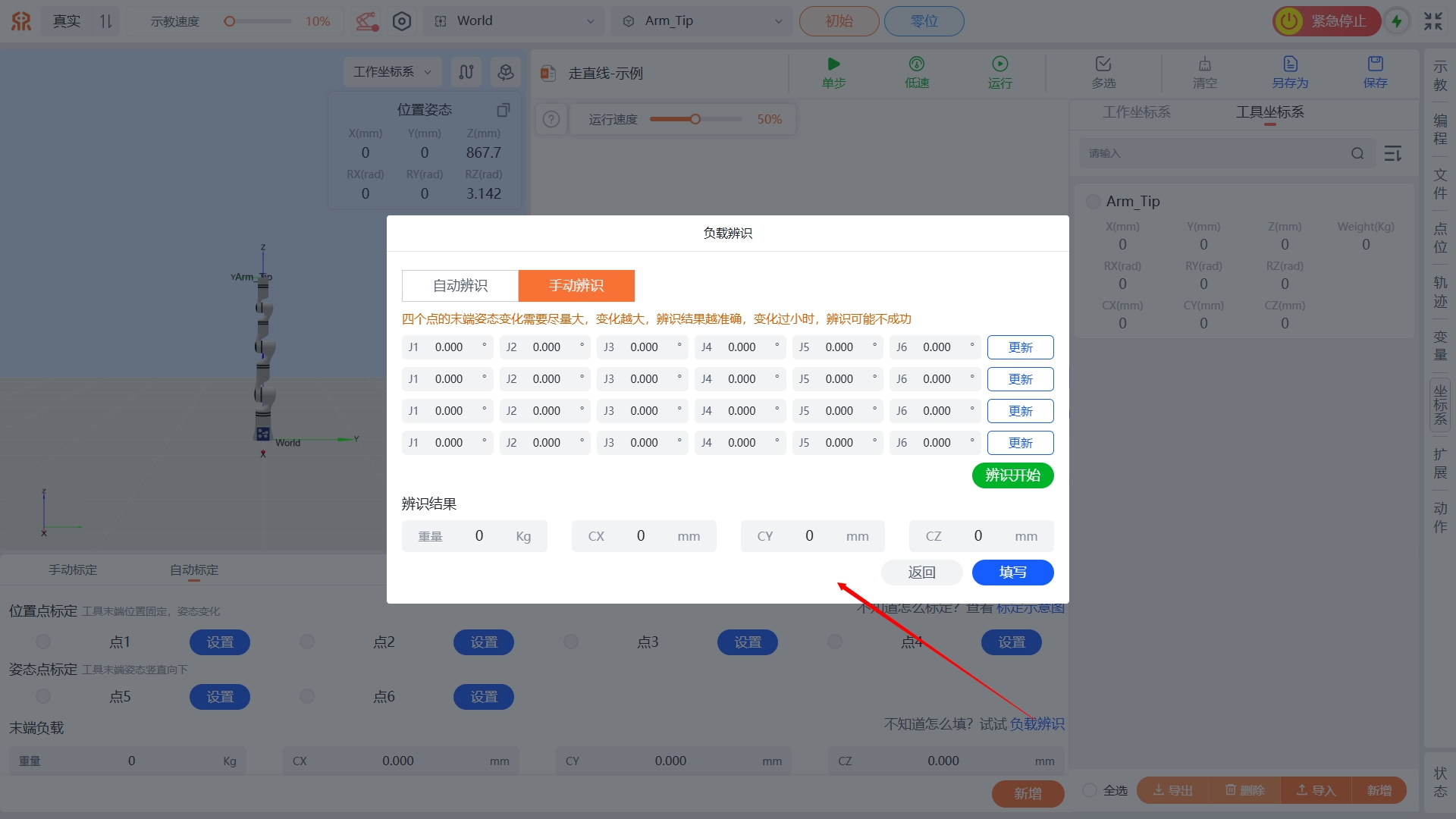
- 自动辨识:执行机械臂默认指定的一组末端姿态,直接点击
辨识开始自动进行负载辨识。 - 手动辨识:手动指定四个机械臂末端姿态,四个点的末端姿态变化需要尽量大,变化越大,辨识结果越准确,变化过小时,辨识可能不成功,末端姿态设置完成后,点击
辨识开始进行负载辨识。 - 辨识完成后,点击对话框右下方的
填写。
- 自动辨识:执行机械臂默认指定的一组末端姿态,直接点击
说明
- 负载辨识:通过机械臂在末端带载情况下执行一组特定运动,然后通过内部动力学算法实现对末端工具的重量、CX、CY、CZ的计算,最终计算出的末端负载会与实际称重得出的重量存在0.5KG左右偏差属正常现象。
- 若末端夹具长度较长在进行负载辨识运动时可能会与机械臂发生碰撞。
- 信息定义完成后,点击页面下方的
新增,在弹出的对话框中定义坐标系名称信息,完成工具坐标系标定的新增。新增的工具坐标系标定在页面右侧的列表中展示。
关于
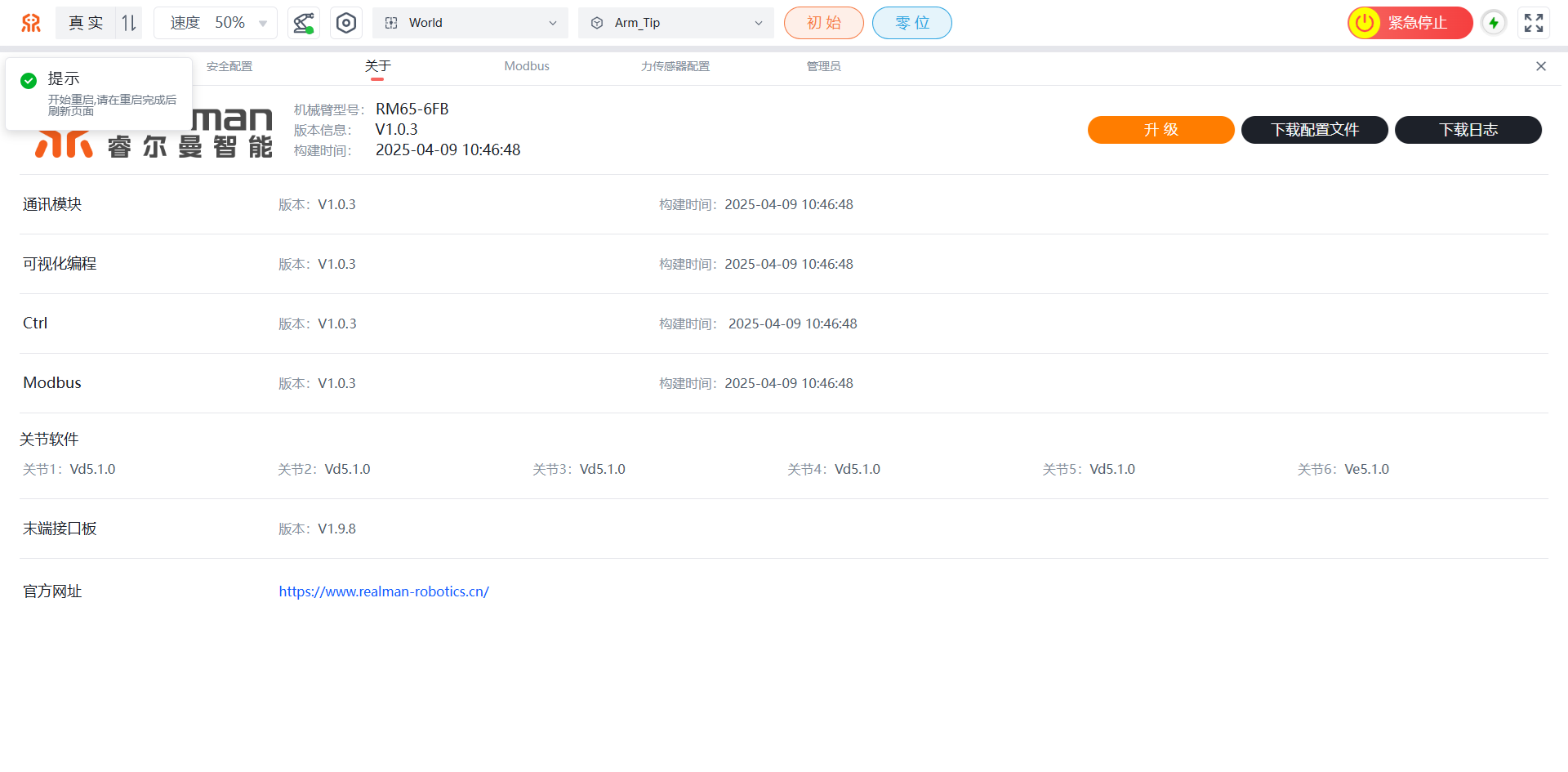
关于页面显示示教器如下信息,同时支持进行升级、下载配置文件和下载日志操作。
- 机械臂型号、版本信息、构建时间;
- 通讯模块、可视化编程、Ctrl、Modbus的版本和构建时间;
- 各关节的软件版本。
- 末端接口板版本。
- 官方网址:https://www.realman-robotics.cn/。
升级
机器人控制器的系统程序可在示教器中点击配置按钮,并在配置页面选择关于页签进行升级(升级前请确认是否可以升级对应版本,否则可能发生严重问题)。
具体操作步骤如下:
- 将厂家提供的 .realman 后缀的文件下载到本地;
- 点击
升级按钮,在弹出的窗口中找到并选择上一步保存的文件。选择成功后,开始进行文件解析。
- 文件解析完成后,弹出所选升级文件列表,请选择需要升级的文件(默认选择所有文件),点击
开始升级按钮,开始升级。

- 等待升级成功(文件较大时升级时间可能需要4-5min,请耐心等待);
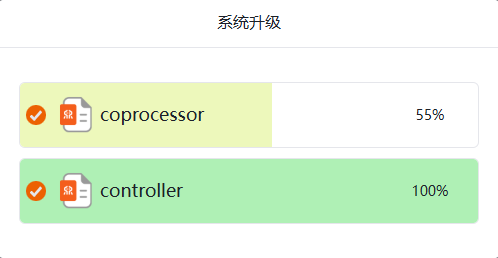
- 当所有进度升级成功后,界面显示升级完成。

- 点击
请立即重启,并在弹出的对话框中,点击确定,重启机械臂。
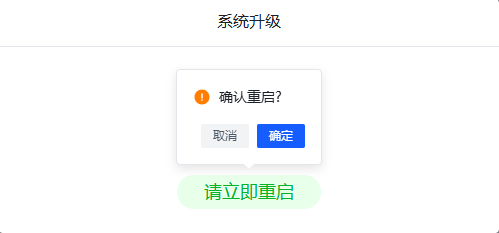
- 当重启完成后机器人即可正常工作。
注意
更新控制器程序注意事项:机器人更新程序结束之后,需重启机械臂并且打开WEB示教器,进入到示教器首页之后按下Ctrl+F5进行浏览器强制刷新,清理缓存。此时更新完毕的机械臂及WEB示教器即可正常使用。
下载配置文件
当需要下载配置文件时,请参考如下操作,配置文件主要包含当前机械臂的参数配置信息。
- 点击
配置按钮,进入配置页面。 - 选择
关于页签,点击下载配置文件,系统自动开始打包,并下载示教器配置文件。

下载日志
当需要下载日志时,请参考如下操作,日志主要包含示教器的所有操作指令和各种错误代码,并带有时间戳。
- 点击
配置按钮,进入配置页面。 - 选择
关于页签,点击下载日志,系统自动开始打包,并下载示教器日志。
Modbus
机械臂可以通过MODBUS-TCP协议直接调用WEB示教器保存的编程文件,也可直接控制或者查询机械臂状态,具体操作方法。
Modbus功能分为控制器端(485)、末端(485)和ModbusTCP,用户可以通过选择对应页签完成Modbus的一系列设置。
控制器端(485)
机械臂可以通过控制器端(485)查询机械臂状态。
- 类型: 支持选择JSON、Modbus-RTU(控制器端主)和Modbus-RTU(控制器端从)三种类型。
- 波特率:支持选择9600、19200、38400、57600、115200、230400、460800七种波特率。
- 查询: 可根据需要设置查询参数,包括模式、开始地址、外设设备地址、长度和轮询时间。
- 模式: 可根据需要查询机械臂不同模式的数据,包括线圈输出、保持寄存器、输入寄存器和离散量输入,其中线圈输出和保持寄存器模式支持写入参数值。
- 开始地址: 设置查询寄存器的起始地址,可仅显示起始地址之后的寄存器数据,默认为0。
- 外设设备地址: 设置查询的外设设备地址,默认为1。
- 长度: 设置查询寄存器的地址长度,可仅显示起始地址之后的对应长度的寄存器数据,默认为100,取值范围为1-100。
- 轮询时间: 设置查询寄存器的轮询时间,默认为0,取值范围为1-10,可取小数点后三位。
- 选择进制: 在寄存器查询结果中,可根据需要切换数据的显示格式,目前支持十进制(无符号)、十进制(有符号)和十六进制三种。
获取控制器端(485)参数值
在控制器端(485)页签,依次选择类型和波特率后,点击设置,然后选择模式,并设置开始地址、外设设备地址、长度和轮询时间,点击查询可查询机械臂当前数据。具体地址参数值说明,请参考RM机械臂Modbus从站地址表。
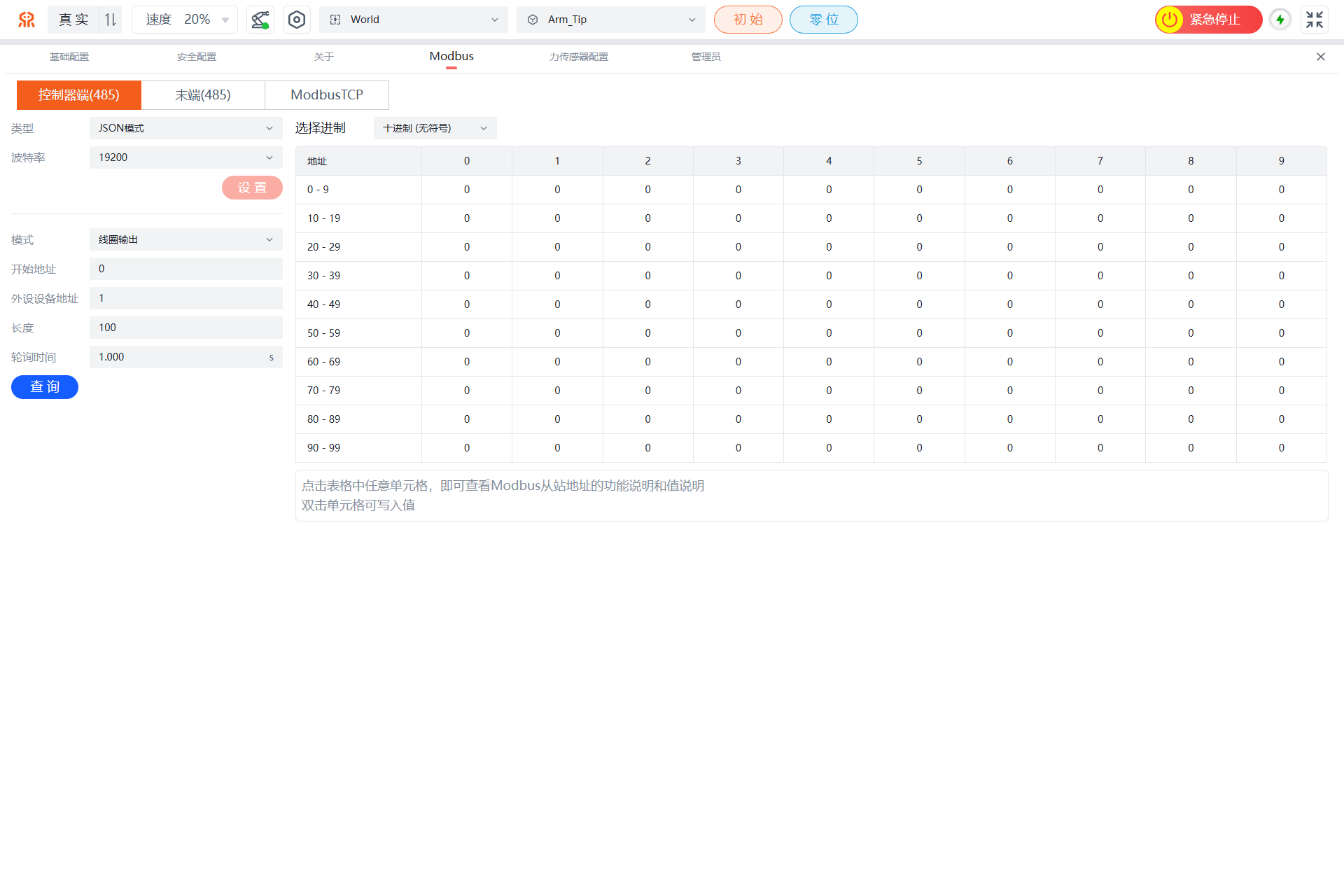
备注:点击表格中任意单元格,即可查看Modbus从站地址的功能说明和值说明;在Modbus主站类型中的线圈输出和保持寄存器模型中,支持双击单元格写入值。
末端(485)
机械臂可以通过末端(485)查询机械臂状态。
- 类型: 支持选择Modbus-RTU(末端主)、灵巧手模式和夹爪模式三种类型。
- 波特率:支持选择9600、115200、460800三种波特率。
- 查询: 可根据需要设置查询参数,包括模式、开始地址、外设设备地址、长度和轮询时间。
- 模式: 可根据需要查询机械臂不同模式的数据,包括线圈输出、保持寄存器、输入寄存器和离散量输入,其中线圈输出和保持寄存器模式支持写入参数值。
- 开始地址: 设置查询寄存器的起始地址,可仅显示起始地址之后的寄存器数据,默认为0。
- 外设设备地址: 设置查询的外设设备地址,默认为1。
- 长度: 设置查询寄存器的地址长度,可仅显示起始地址之后的对应长度的寄存器数据,默认为100,取值范围为1-100。
- 轮询时间: 设置查询寄存器的轮询时间,默认为0,取值范围为1-10,可取小数点后三位。
- 选择进制: 在寄存器查询结果中,可根据需要切换数据的显示格式,目前支持十进制(无符号)、十进制(有符号)和十六进制三种。
获取末端(485)参数值
在末端(485)页签,依次选择类型和波特率后,点击设置,然后选择模式,并设置开始地址、外设设备地址、长度和轮询时间,点击查询可查询机械臂当前数据。具体地址参数值说明,请参考RM机械臂Modbus从站地址表。
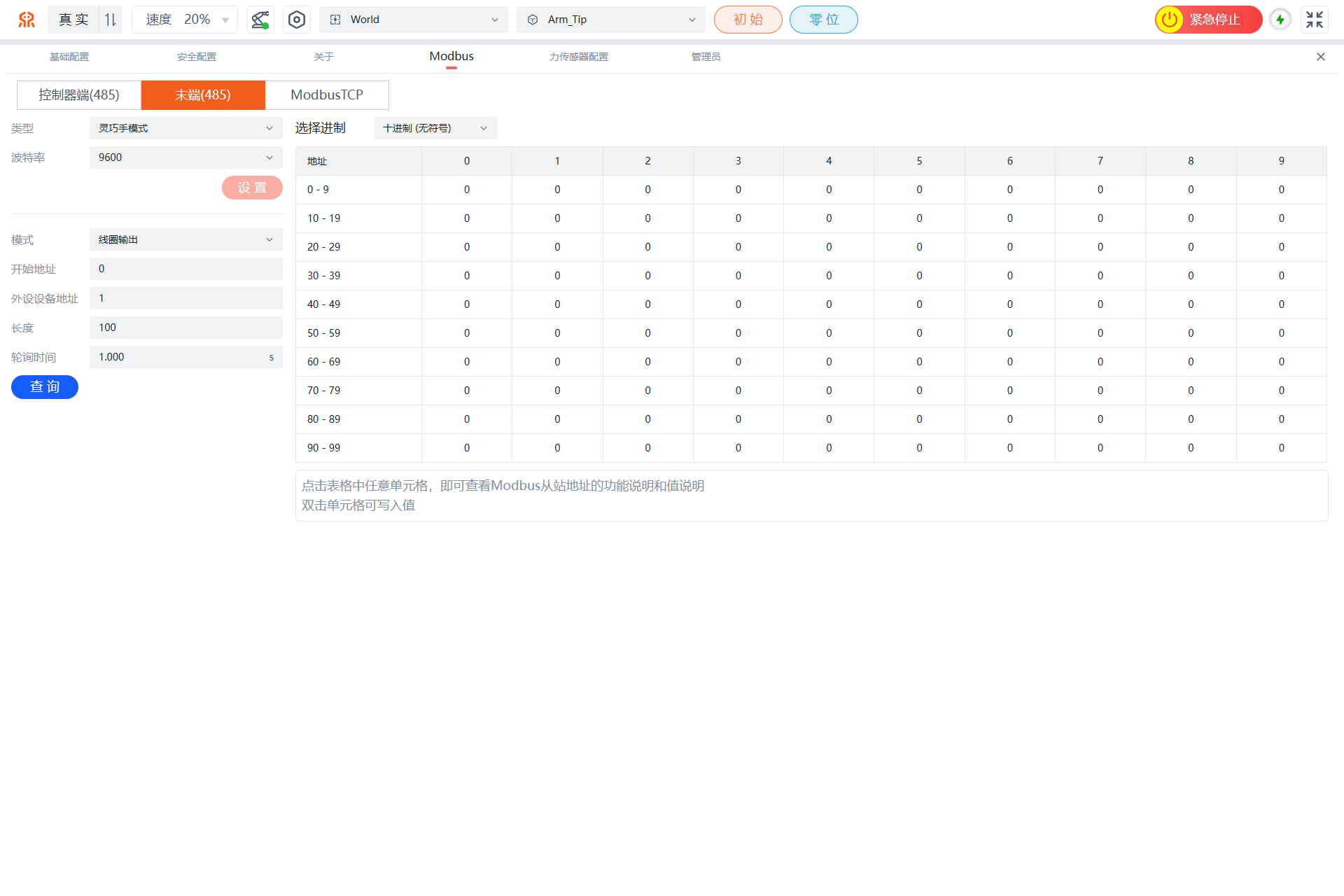
备注:点击表格中任意单元格,即可查看Modbus从站地址的功能说明和值说明;在Modbus主站类型中的线圈输出和保持寄存器模型中,支持双击单元格写入值。
ModbusTCP
机械臂可以通过MODBUS-TCP协议直接控制或者查询机械臂状态。
- 类型: 支持选择Modbus-TCP(主)和Modbus-TCP(备)两种类型。
- 查询/写入: 可根据需要设置查询参数,包括模式、连接(仅Modbus-TCP主站类型支持)、开始地址、外设设备地址、长度和轮询时间。
- 模式: 可根据需要查询机械臂不同模式的数据,包括线圈输出、保持寄存器、输入寄存器和离散量输入,其中线圈输出和保持寄存器模式支持写入参数值。
- 连接: 选择已添加的Modbus-TCP主站。
- 开始地址: 设置查询寄存器的起始地址,可仅显示起始地址之后的寄存器数据,默认为0。
- 外设设备地址: 设置查询的外设设备地址,默认为1。
- 长度: 设置查询寄存器的地址长度,可仅显示起始地址之后的对应长度的寄存器数据,默认为100,取值范围为1-100。
- 轮询时间: 设置查询寄存器的轮询时间,默认为0,取值范围为1-10,可取小数点后三位。
- 选择进制: 在寄存器查询结果中,可根据需要切换数据的显示格式,目前支持十进制(无符号)、十进制(有符号)和十六进制三种。
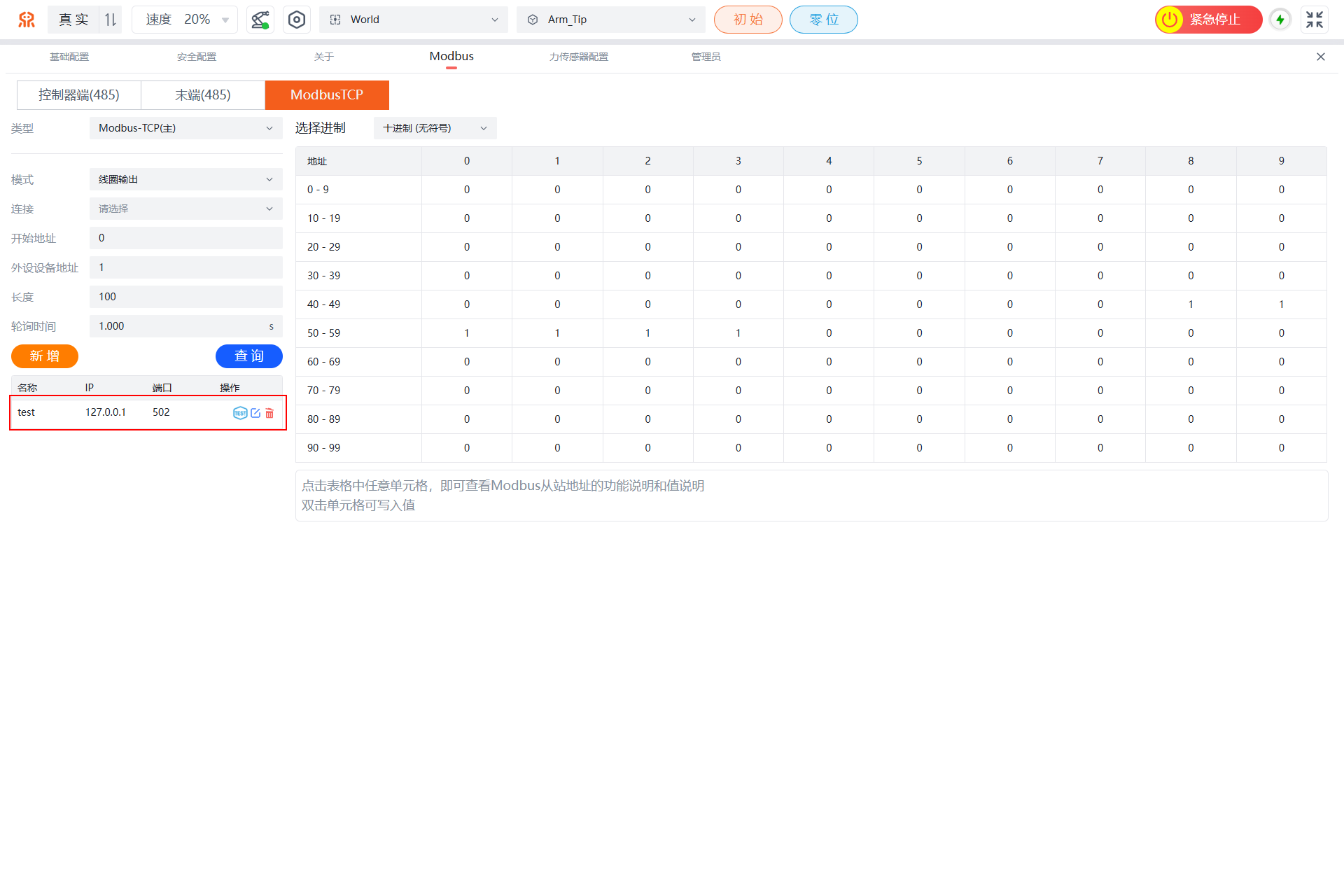
- Modbus-TCP主站列表: 仅Modbus-TCP主站类型显示,可通过
新增按钮添加多个主站信息,支持进行ping、编辑和删除操作。- ping:测试主站连接状态。
- 编辑:修改主站名称、IP和端口信息。
- 删除:删除主站信息。
机械臂主站管理
Modbus主站支持进行新增、Ping连通性、编辑和删除等操作管理。
新增
- 在
ModbusTCP页签,点击新增按钮,弹出的新增ModbusTCP主站对话框。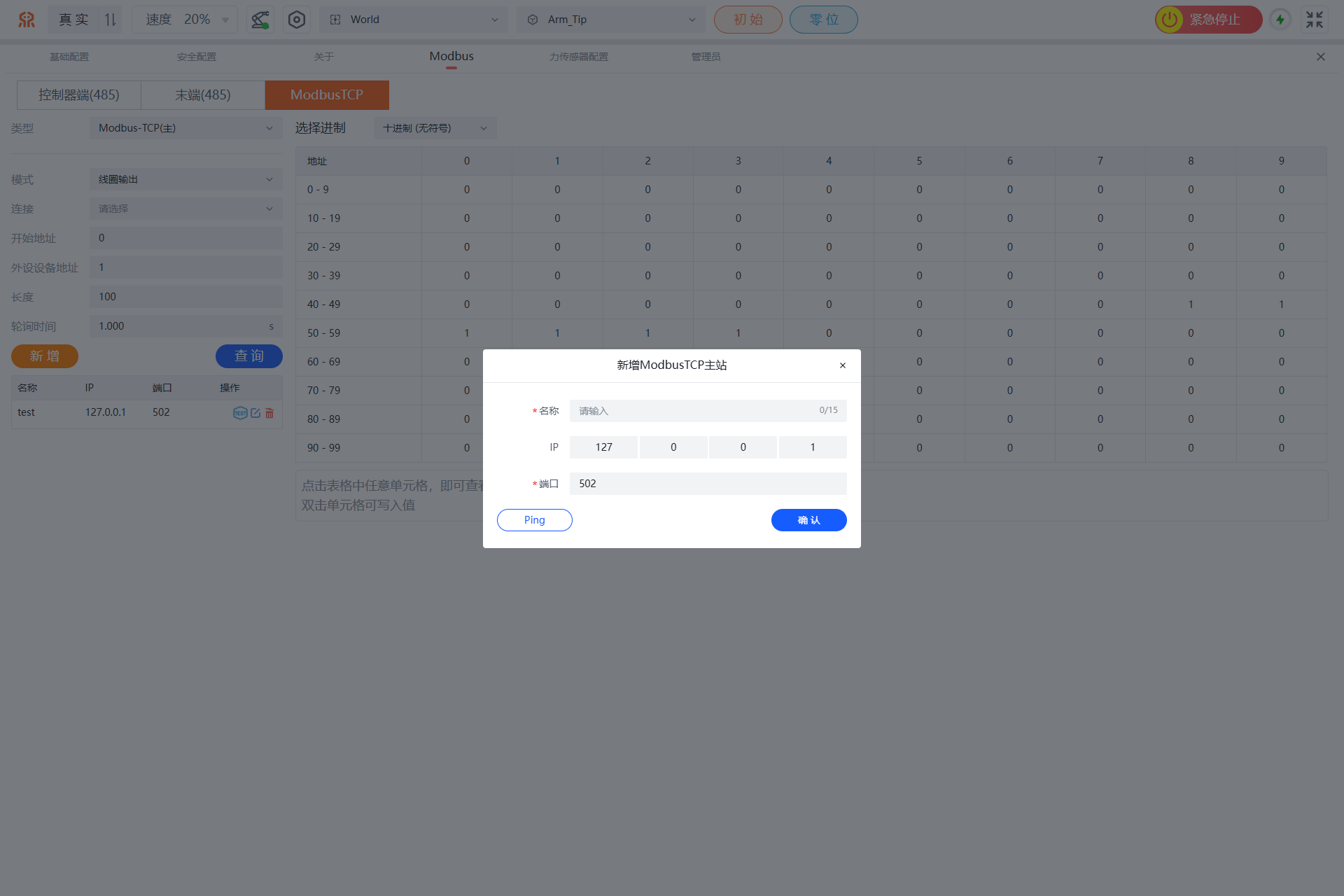
- 填写主站名称、IP和端口信息后,点击
确认新增ModbusTCP主站。
主站信息填写完成后,可通过点击Ping按钮确认主站地址的连通性。
- ModbusTCP主站新增完成后,可在左侧列表查看。
Ping
在ModbusTCP页签的ModbusTCP主站列表中,点击目标主站操作列的Ping按钮,如出现提示则表示连通性测试成功,否则表示失败。
编辑
- 在
ModbusTCP页签的ModbusTCP主站列表中,点击目标主站操作列的编辑按钮,弹出编辑ModbusTCP主站对话框。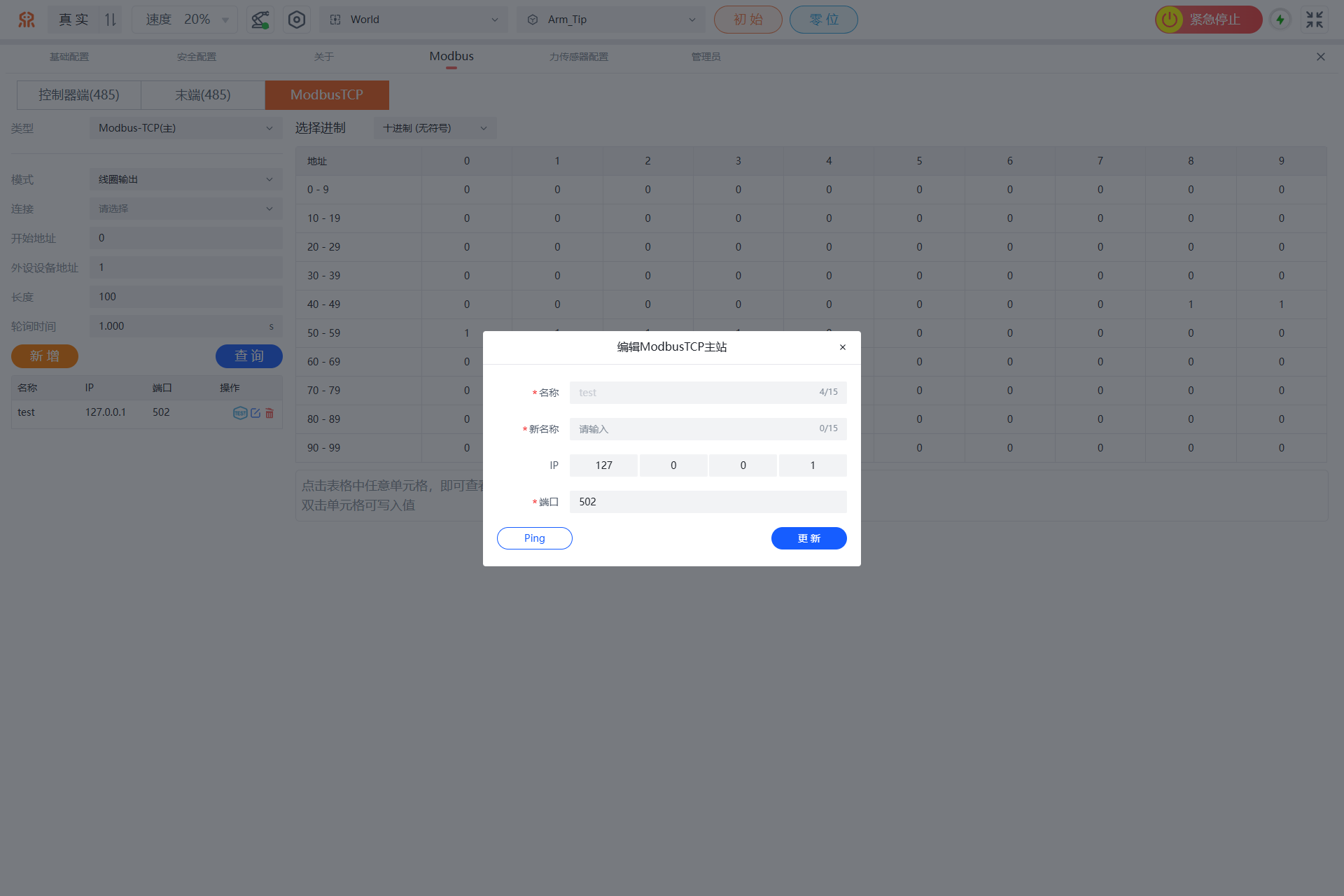
- 填写ModbusTCP主站新名称,并根据需要修改IP和端口信息后,点击
更新,完成ModbusTCP主站编辑。
主站信息修改完成后,可通过点击Ping按钮确认主站地址的连通性。
删除
在ModbusTCP页签的ModbusTCP主站列表中,点击目标主站操作列的删除按钮,并在弹出对话框中,点击确认,完成ModbusTCP主站删除。 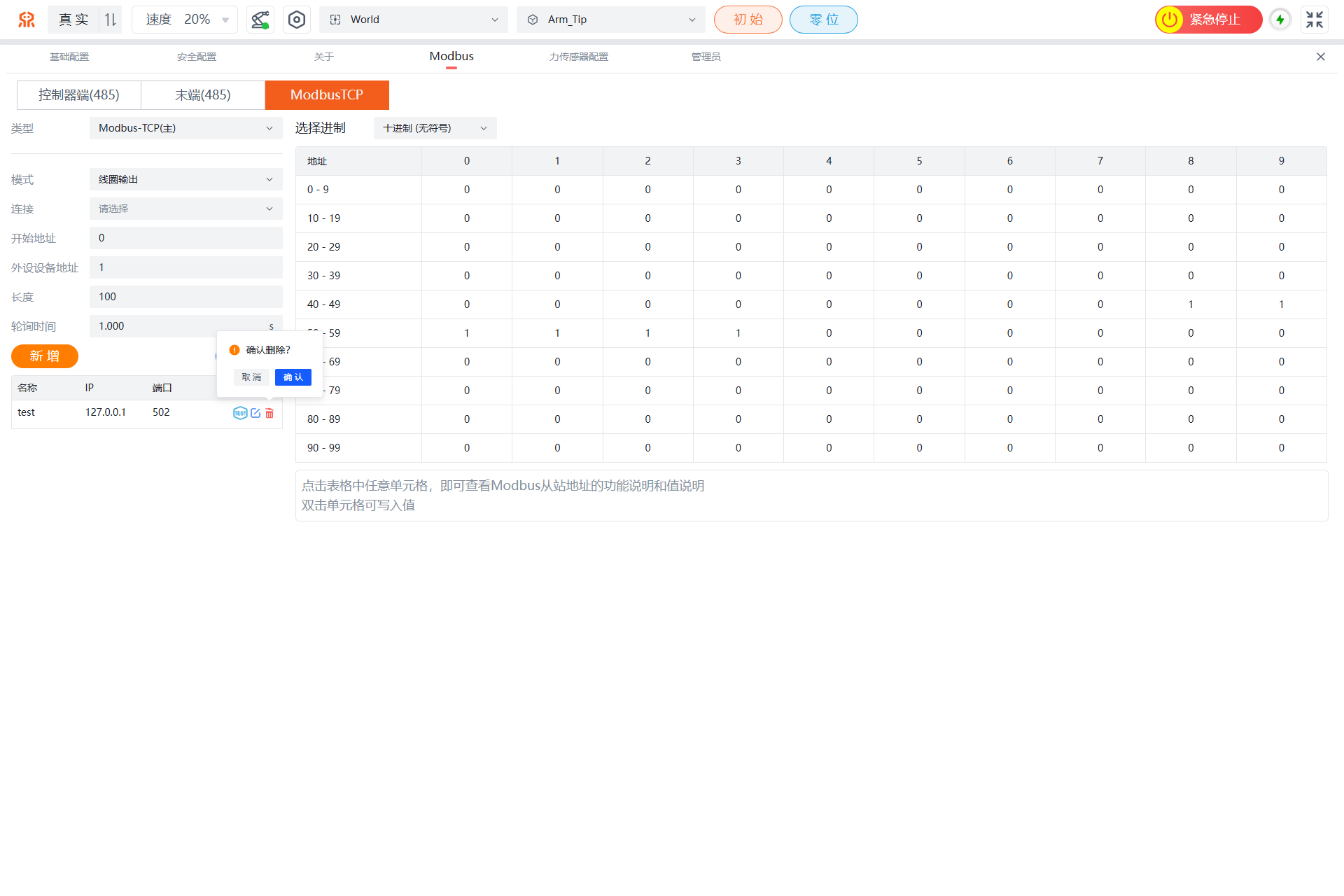
获取ModbusTCP参数值
在ModbusTCP页签,依次选择Modbus类型、模式、连接(仅Modbus-TCP主站类型支持),并设置开始地址、外设设备地址、长度和轮询时间,然后点击查询可查询机械臂当前数据。具体地址参数值说明,请参考RM机械臂Modbus从站地址表。
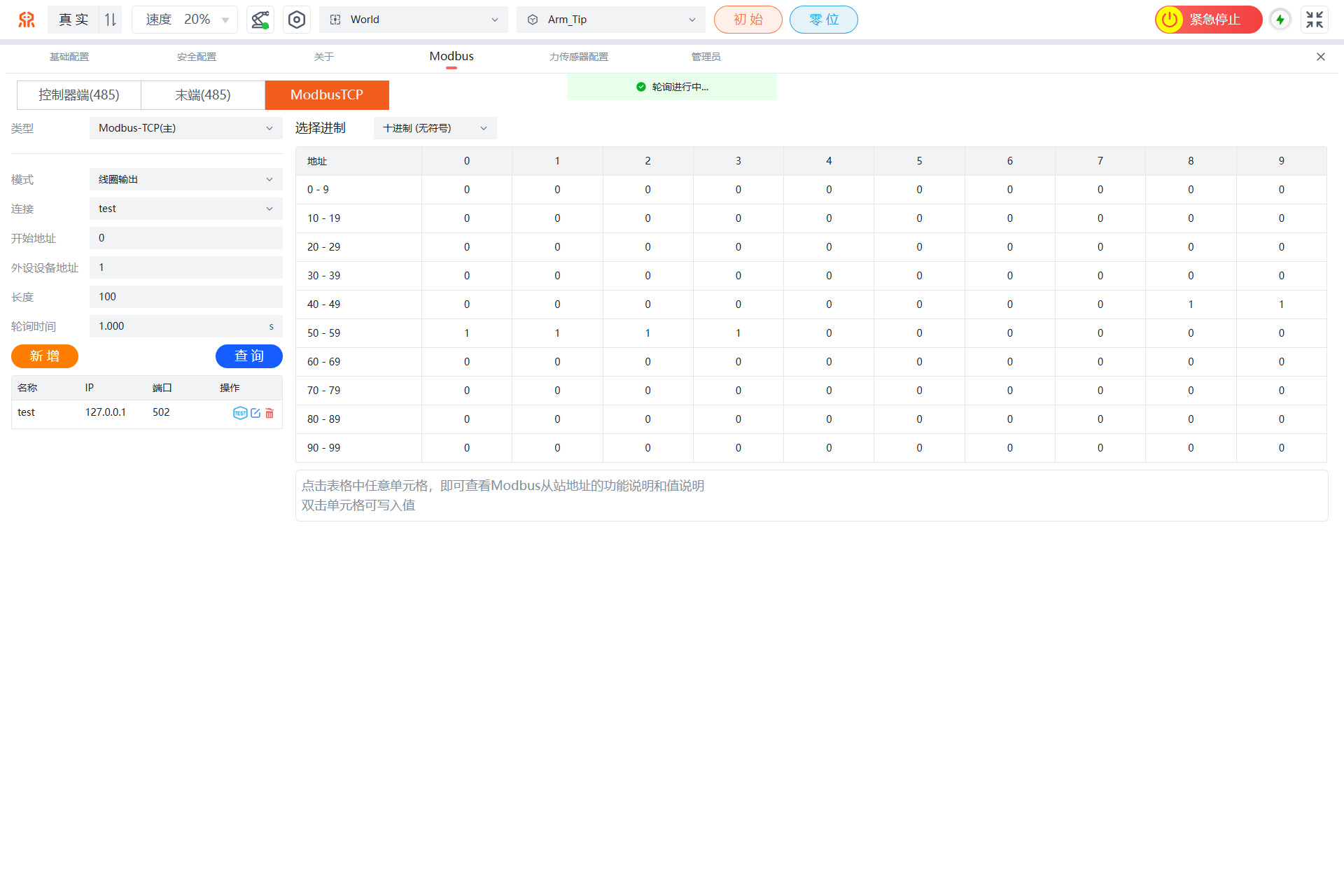
备注:点击表格中任意单元格,即可查看Modbus从站地址的功能说明和值说明;在Modbus主站类型中的线圈输出和保持寄存器模型中,支持双击单元格写入值。
修改ModbusTCP参数值
- 当用户选择
Modbus-TCP(主)类型且选择线圈输出模式时,可通过双击对应地址的单元格修改参数为0或1。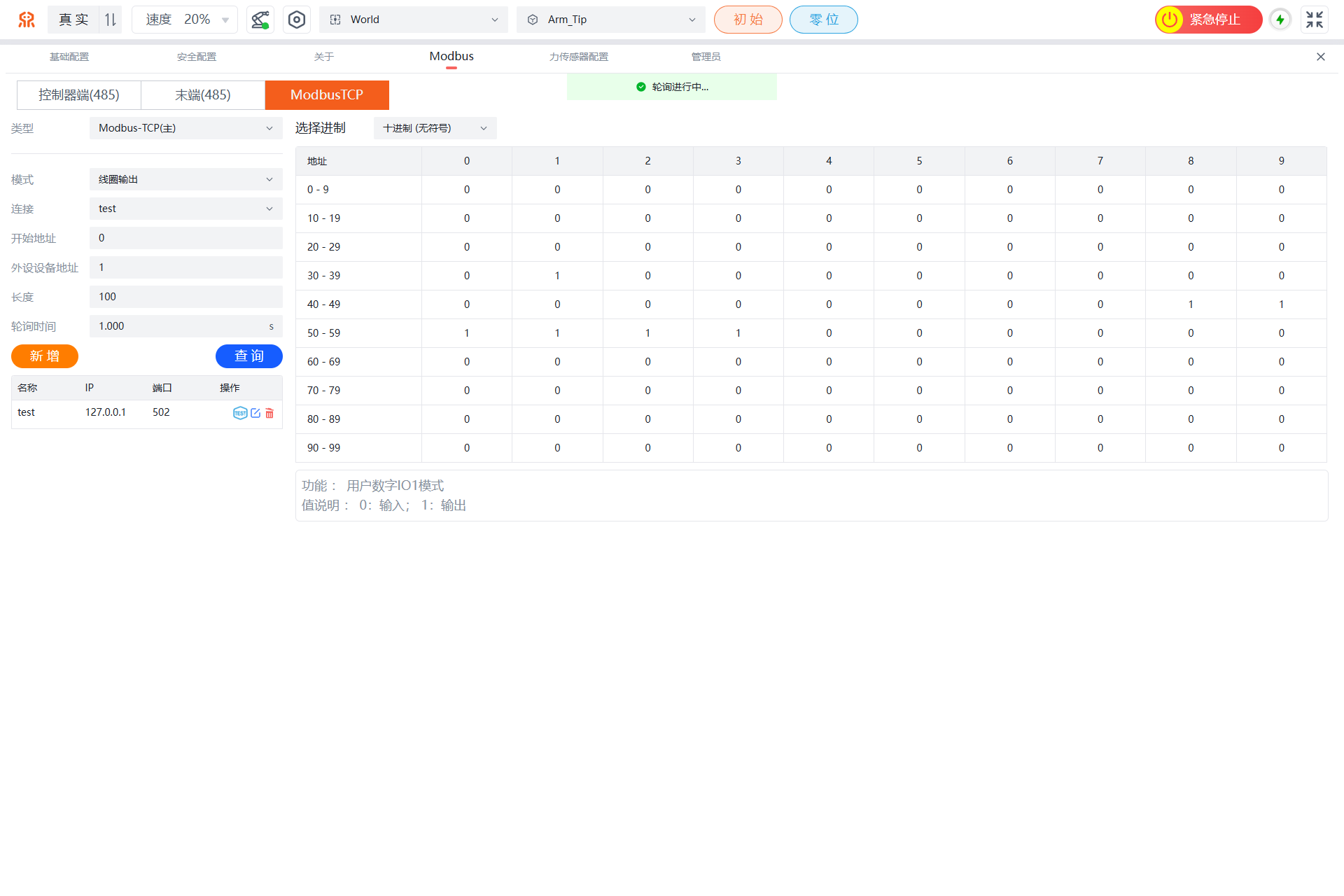
- 当用户选择
Modbus-TCP(主)类型且选择保持寄存器模式时,可通过双击对应地址单元格,并在弹出的数据写入对话框中修改对应单元格的参数值,可根据需要修改长度,完成一次性修改多个地址参数值。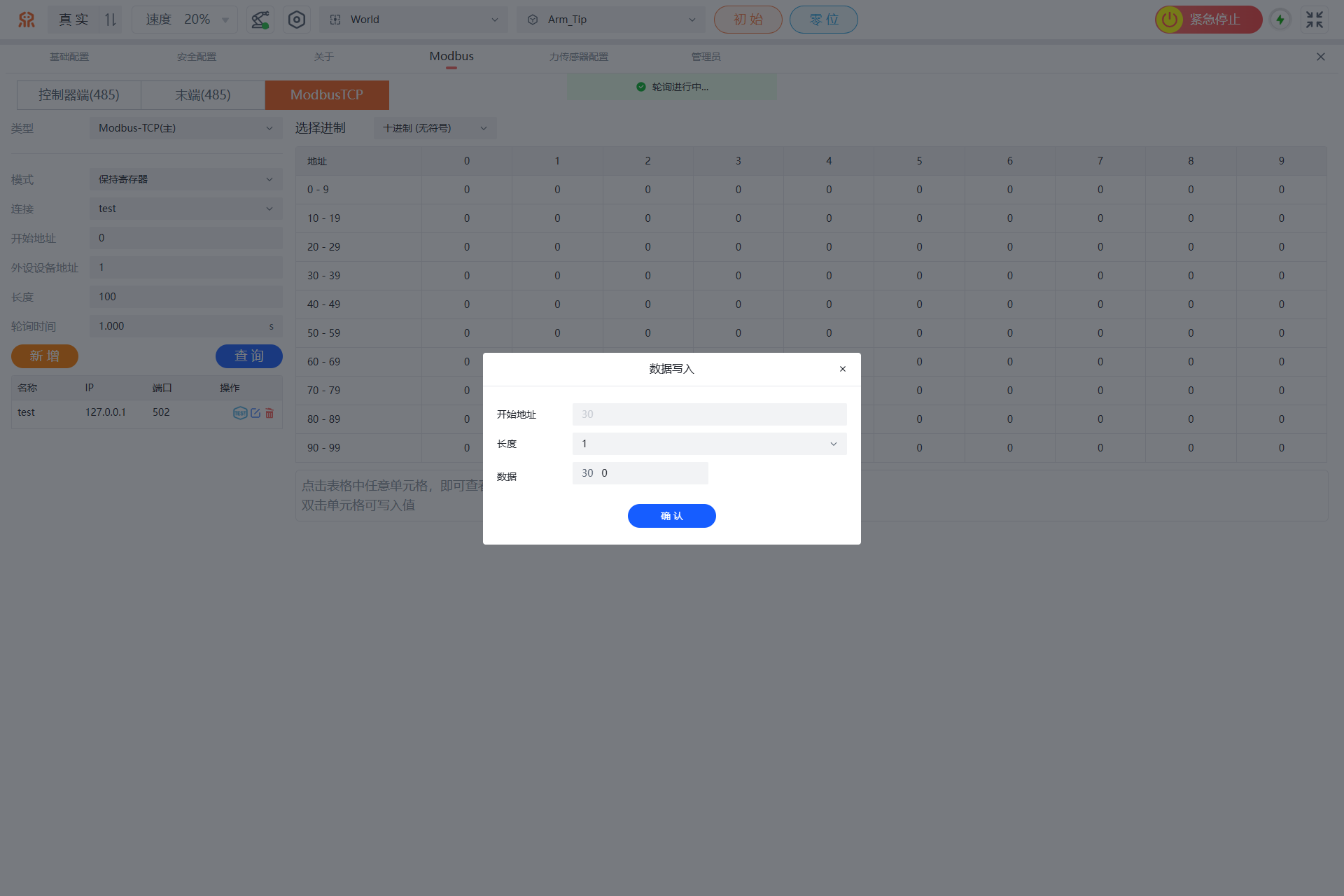
- 具体地址参数值说明,请参考RM机械臂Modbus从站地址表。
力传感器配置
六维力传感器参数说明见下表:
| 六维力传感器 | ||||||
|---|---|---|---|---|---|---|
| 额定载荷 | X:200N | Y:200N | Z:200N | MX:7Nm | MY:7Nm | MZ:7Nm |
注意
六维力量程200N/7NM,如果末端受到600N以上的力或者21NM以上的力矩,会对传感器造成不可逆损坏。机械臂在运行过程中,避免传感器与外部设备发生硬碰撞,造成损伤。
力传感器配置界面,六维力重心计算传感器标定。
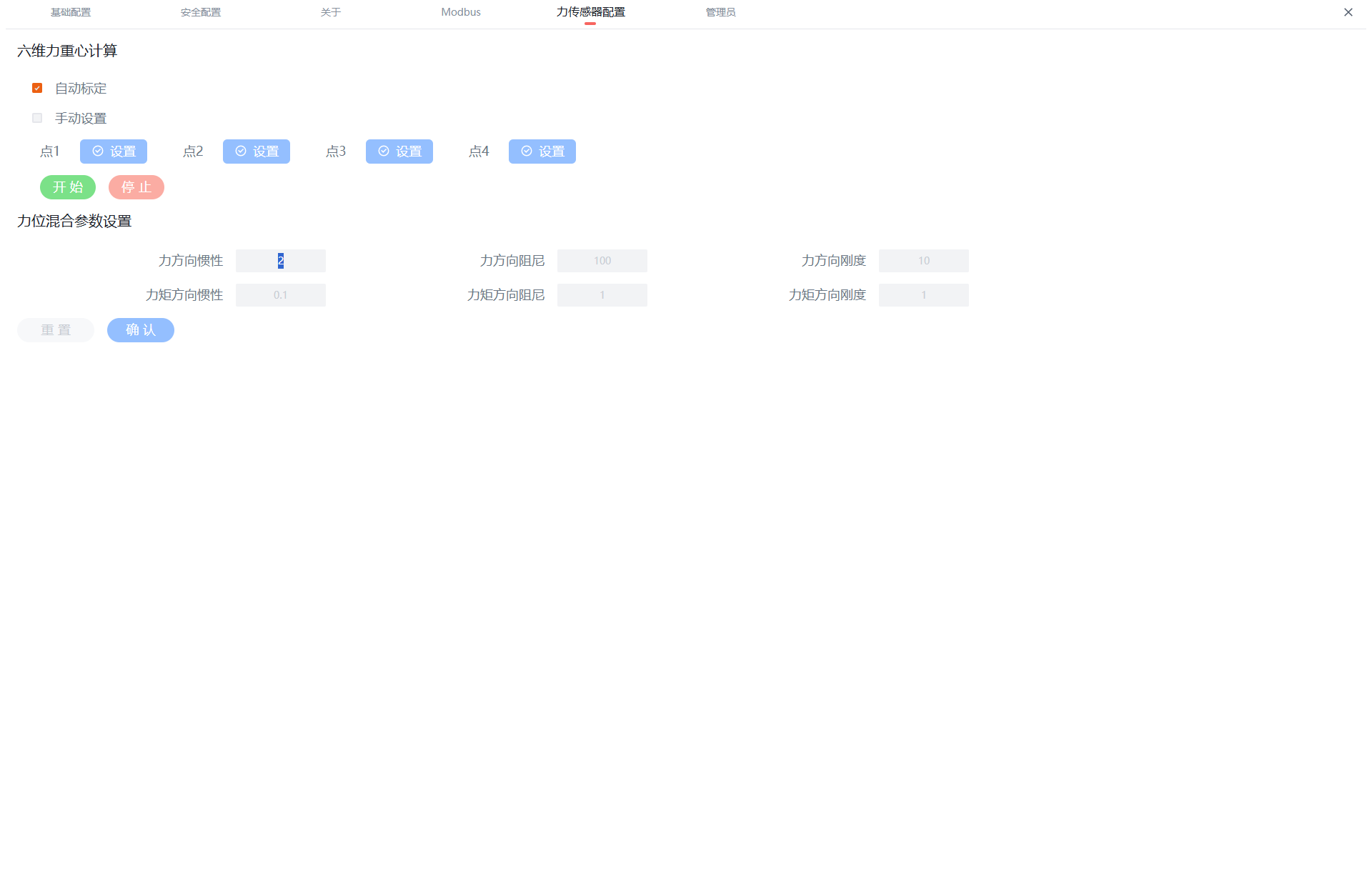
六维力重心计算
仅当末端工具发生更换后,才需要进行重新进行六维力重心计算。标定过程可通过控制器预存的轨迹路径进行自动标定,为避免预存轨迹在运行过程中与外部设备发生干涉,用户也可以根据实际场景进行手动标定。
自动标定:
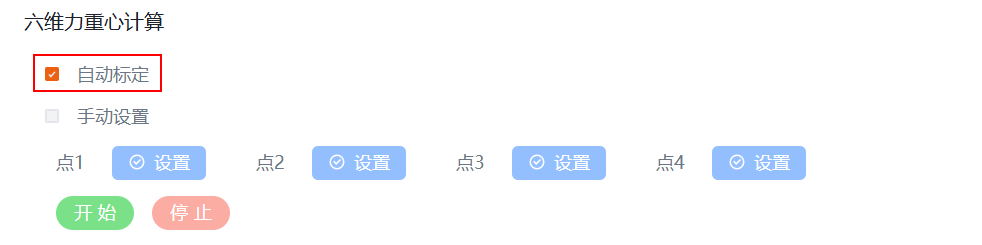
自动标定过程,点击开始按钮,将提示标定状态提示,如下图所示。

机器人会自动运行4种已经设定的姿态位置,进行重心计算。若运动过程中有机器人碰撞危险,需点击停止按钮进行终止运行。
六维力重心标定成功后,将弹出“标定成功”提示,重心标定完成。
手动标定:
手动标定过程,勾选手动设置选框,通过机械臂示教界面分别设置4个位姿差距尽量大的点位,待4个点位记录完成后,点击确定钮。
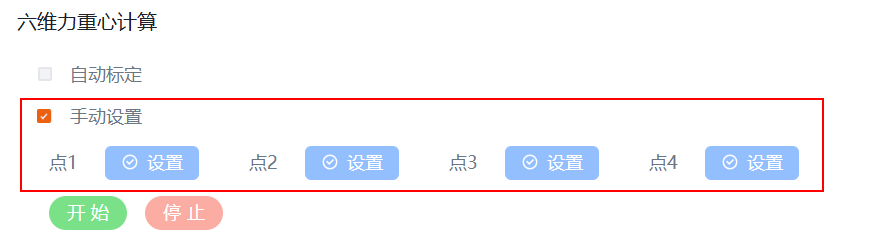
机器人自动进行六维力重心计算,待弹出传感器重心标定成功提示,重心标定完成。
力位混合参数设置
力位混合参数设置,支持设置力方向惯性、力方向阻尼、力方向刚度、力矩方向惯性、力矩方向阻尼和力矩方向刚度,参数修改完成后点击确认完成设置,如需恢复初始设置,请点击重置。
