JSON协议:
力传感器指令集(选配) 六维力
睿尔曼机械臂六维力版末端配备集成式六维力传感器,无需外部走线,用户可直接通过协议对六维力进行操作,获取六维力数据。
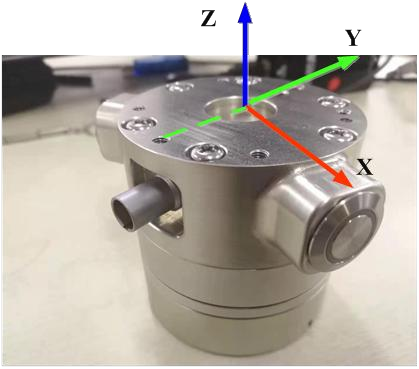
如下图所示,正上方为六维力的Z轴,航插反方向为六维力的Y轴,坐标系符合右手定则。机械臂位于零位姿态时,工具坐标系与六维力的坐标系方向一致。
另外,六维力额定力200N,额定力矩8Nm,过载水平300%FS,工作温度5~80℃,准度±2%FS。使用过程中注意使用要求,防止损坏六维力传感器。
查询六维力数据get_force_data
查询当前六维力传感器得到的力和力矩信息:Fx,Fy,Fz,Mx,My,Mz。
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
get_force_data | string | 获取力传感器信息。 |
- 代码示例
输入
{"command":"get_force_data"}输出
原始力数据force_data
依次为Fx=1N,Fy=2N,Fz=3N,Mx=0.4Nm,My=0.5Nm,Mz=0.6Nm;
传感器坐标系下系统受到的外力数据zero_force_data
依次为Fx=0.5N,Fy=1N,Fz=1.5N,Mx=0.2Nm,My=0.25Nm,Mz=0.3Nm;
当前工作坐标系下系统受到的外力数据work_zero_force_data
依次为Fx=0.5N,Fy=1N,Fz=1.5N,Mx=0.2Nm,My=0.25Nm,Mz=0.3Nm;
当前工具坐标系下系统受到的外力数据tool_zero_force_data
依次为Fx=0.5N,Fy=1N,Fz=1.5N,Mx=0.2Nm,My=0.25Nm,Mz=0.3Nm;
数据精度:0.001。
{
"command": "get_force_data",
"force_data": [
1000,
2000,
3000,
400,
500,
600
],
"zero_force_data": [
500,
1000,
1500,
200,
250,
300
],
"work_zero_force_data": [
500,
1000,
1500,
200,
250,
300
],
"tool_zero_force_data": [
500,
1000,
1500,
200,
250,
300
]
}六维力数据清零clear_force_data
将六维力数据清零,标定当前状态下的零位。
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
clear_force_data | string | 标定当前状态下的零位。 |
- 代码示例
输入
{"command":"clear_force_data"}输出
清空成功:
{
"command": "clear_force_data",
"clear_state": true
}清空失败:
{
"command": "clear_force_data",
"clear_state": false
}自动设置六维力重心参数set_force_sensor
设置六维力重心参数,六维力重新安装后,必须重新计算六维力所受到的初始力和重心。分别在不同姿态下,获取六维力的数据,用于计算重心位置。该指令下发后,机械臂以固定的速度运动到各标定点,该过程不可中断,中断后必须重新标定。
提示
重要说明:必须保证在机械臂静止状态下标定。 以RM65机械臂为例,四个标定点的关节角度分别为: 位置1关节角度:{0,0,-60,0,60,0} 位置2关节角度:{0,0,-60,0,-30,0} 位置3关节角度:{0,0,-60,0,-30,180} 位置4关节角度:{0,0,-60,0,-120,0}
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
set_force_sensor | string | 设置力传感器指定位置时的数。 |
- 代码示例
输入
{"command":"set_force_sensor"}输出 配置成功:
{
"command": "set_force_sensor",
"set_state": true
}配置失败:
{
"command": "set_force_sensor",
"set_state": false
}手动标定六维力数据manual_set_force
设置六维力重心参数,六维力重新安装后,必须重新计算六维力所受到的初始力和重心。该手动标定流程,适用于空间狭窄工作区域,以防自动标定过程中机械臂发生碰撞,用户可以手动选取四个位姿下发,当下发完四个点后,机械臂开始自动沿用户设置的目标运动,并在此过程中计算六维力重心。
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
manual_set_force | string | 标定感器重心数。 |
pose1 | int | 位置1关节角度。 |
pose2 | int | 位置2关节角度。 |
pose3 | int | 位置3关节角度。 |
pose4 | int | 位置4关节角度。 |
注意
上述4个位置必须按照顺序依次下发,当下发完pose4后,机械臂开始自动运行计算重心,计算完成后返回协议
- 代码示例
输入 六自由度:
{"command":"manual_set_force_pose1","joint":[0,0,0,0,90000,0]}七自由度:
{"command":"manual_set_force_pose1","joint":[0,0,0,0,0,90000,0]}输出 标定成功:
{
"command": "set_force_sensor",
"set_state": true
}标定失败:
{
"command": "set_force_sensor",
"set_state": false
}停止标定力传感器重心stop_set_force_sensor
在标定力传感器过程中,如果发生意外,发送该指令,停止机械臂运动,退出标定流程。
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
stop_set_force_sensor | string | 停止计算力传感器重心位置。 |
- 代码示例
输入
{"command":"stop_set_force_sensor"}输出 计算成功:
{
"command": "stop_set_force_sensor",
"stop_state": true
}计算失败:
{
"command": "stop_set_force_sensor",
"stop_state": false
}