入门指南:
机械臂扩展 在示教器的扩展界面可对末端工具进行配置如下图所示:
末端控制
末端生态协议
在示教器的扩展界面中,可对末端工具进行配置。支持切换工具端对外的输出电压;可通过RM_ARM+协议自动识别连接的末端工具,并实现简单控制。

- 工具端电源输出:可配置末端接口板对外的输出电源电压,支持0V、12V与24V三档设置。
- RM_ARM+协议:当机械臂末端安装兼容的生态设备时,开启该协议后系统将自动识别设备类型(如二指夹爪、五指灵巧手),并展示其状态与详细信息。支持9600bps、115200bps、256000bps及460800bps四种通讯波特率;用户可通过滑杆调节目标位置、目标角度等参数。
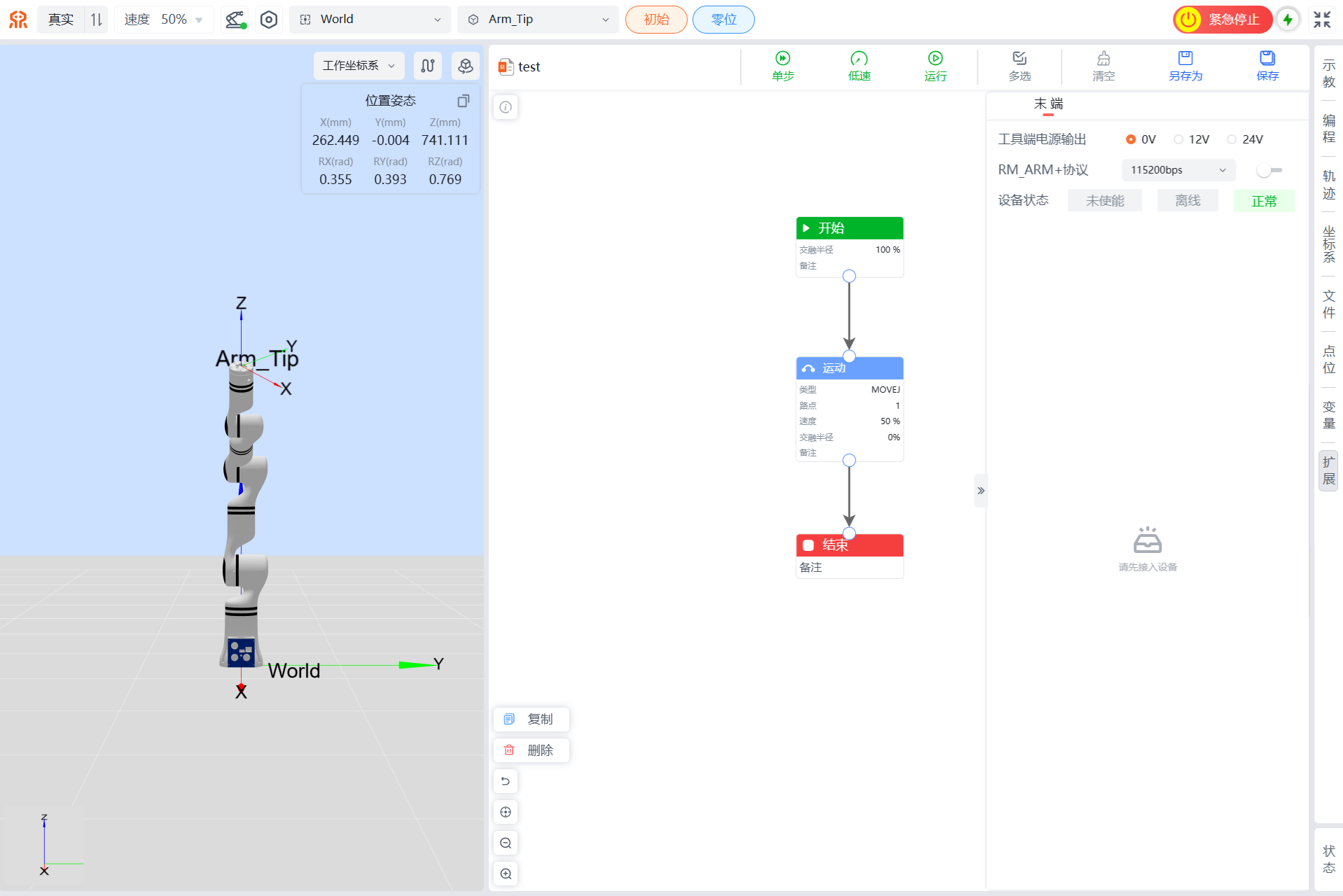
末端工具动作
末端动作管理实现了末端动作从创建到调用的全流程高效管理。支持将目标位置或目标角度数据保存为动作。同时提供末端动作文件管理能力,方便用户对已保存的动作文件进行整理、维护与检索。在图形化编程场景中,用户可直接调用已保存的末端动作,以此简化编程操作,提升整体效率。
添加动作:
- 新增动作:可通过点击
新增按钮,进入扩展>末端页面,自定义目标位置、目标角度等信息,完成动作文件的创建。 - 导入动作:可通过点击
导入按钮,上传本地动作文件,完成动作文件的添加。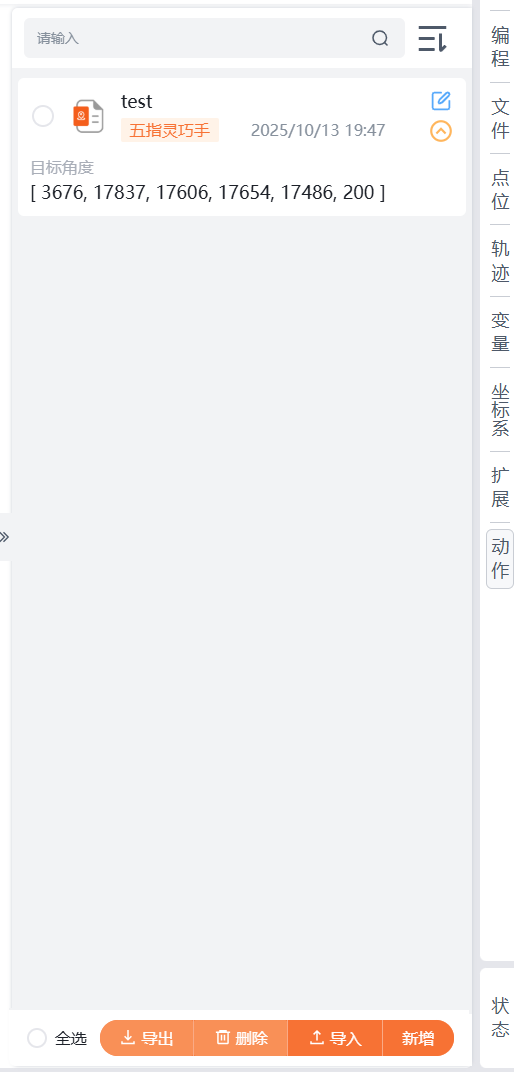
- 新增动作:可通过点击
管理动作:支持对动作文件的查询、修改、导出、删除等操作。
调用动作:
- 在
编程>模块页面,添加末端工具到画板中。
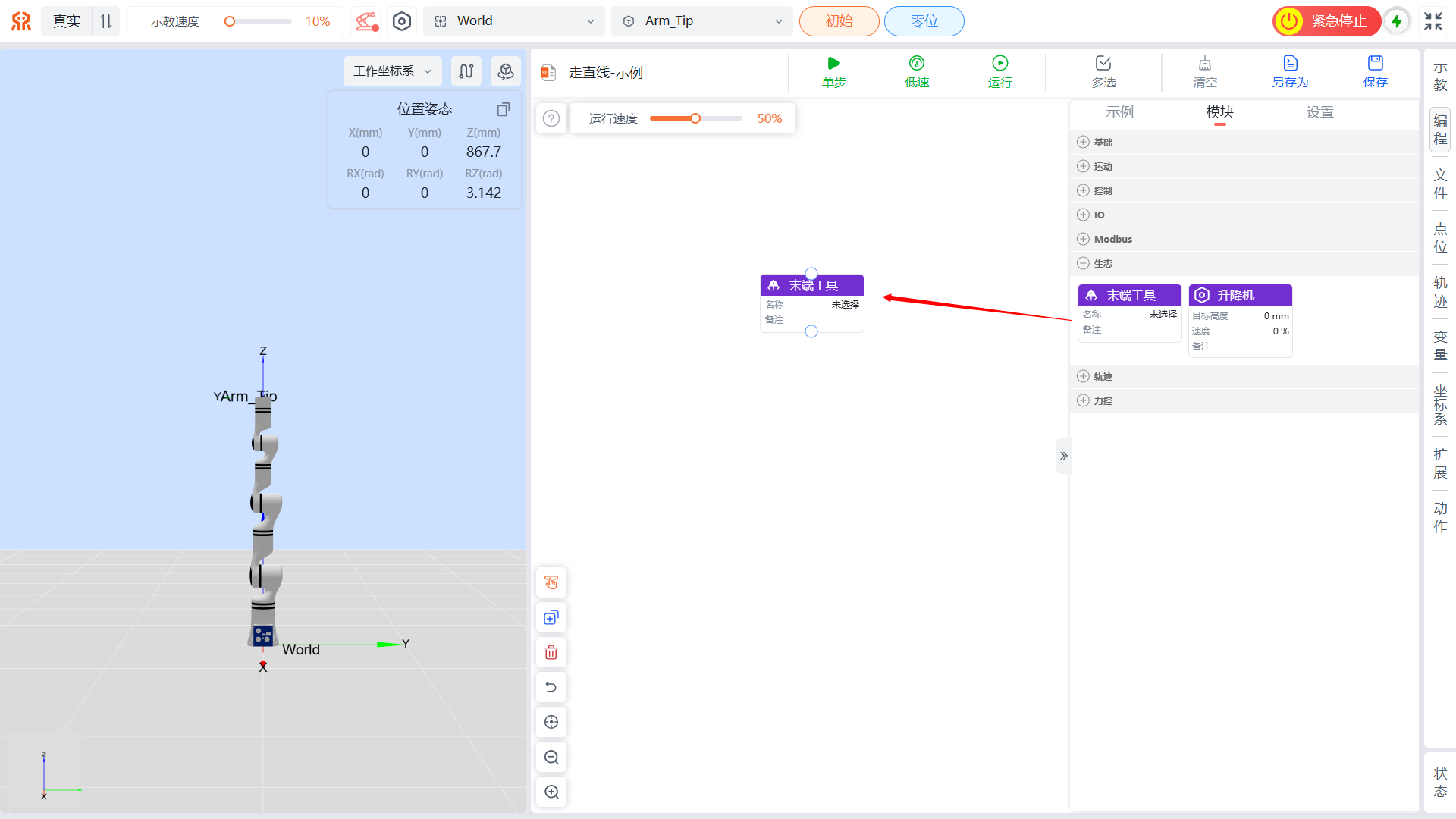
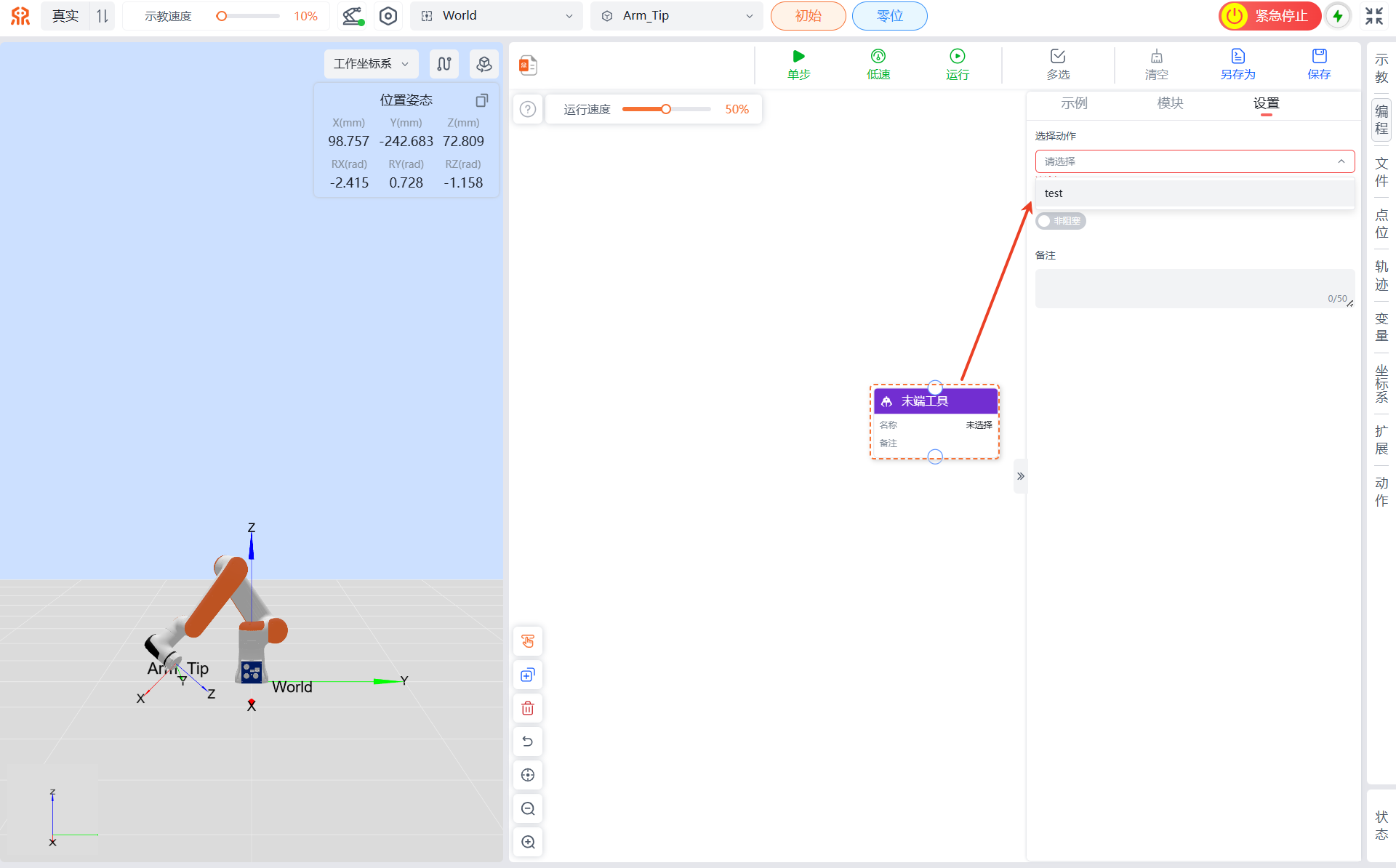
- 选中添加的末端工具,点击
设置,在设置页面配置动作文件。
- 在
升降机控制、扩展关节控制
在示教器的扩展界面可对升降机控制进行参数配置如下图所示。可对当前位置进行上升或下降,也可以设置目标位置后点击运动按钮使升降机到达目标高度。

在示教器的扩展界面可对扩展关节进行控制,参数配置如下图所示:

在连接扩展关节后会显示当前设备状态、状态、速度、加速度、电流、最大最小限位、关节ID。为了防止关节在连接上后有错误,请在连接后先清除关节错误,再点击上使能。扩展关节可向正向运动或者反向运动。可设置目标角度运动,在下方可调节扩展关节运动速度。