JSON协议:
末端工具指令集(选配) 五指灵巧手
睿尔曼机械臂末端配置因时的五指灵巧手,可通过协议对灵巧手进行设置。
灵巧手角度跟随控制hand_follow_angle
设置灵巧手跟随角度,灵巧手:6个主动自由度,自由度1(大拇指弯曲)、自由度2(食指)、自由度3(中指)、自由度4(无名指)、自由度5(小指)、自由度6(大拇指旋转),最高50Hz的控制频率。
注意
如果要使用此功能,需要联系技术支持发送定制的灵巧手固件升级包(傲意或者因时)。
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
hand_follow_angle | string | 设置手指角度。 |
- 因时各自由度的角度定义和运动范围说明如下。
| 角度 | 图例说明 | 范围 |
|---|---|---|
| 小拇指 无名指 中指 食指 | 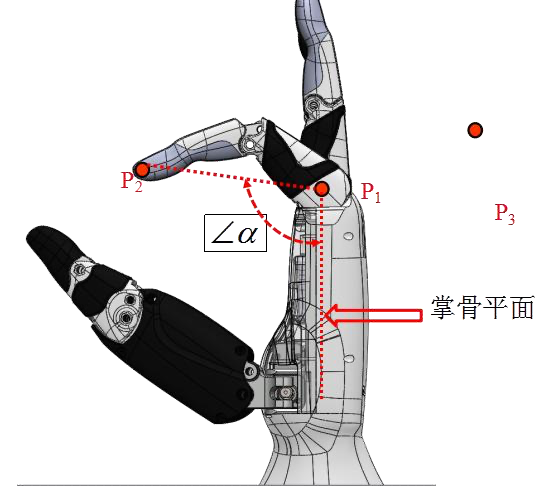 | 19°~176.7° |
| 大拇指弯曲角度 | 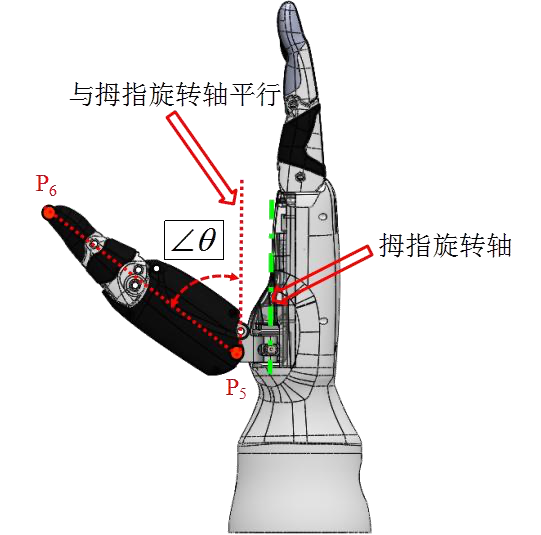 | -130~53.6° |
| 大拇旋转曲角度 | 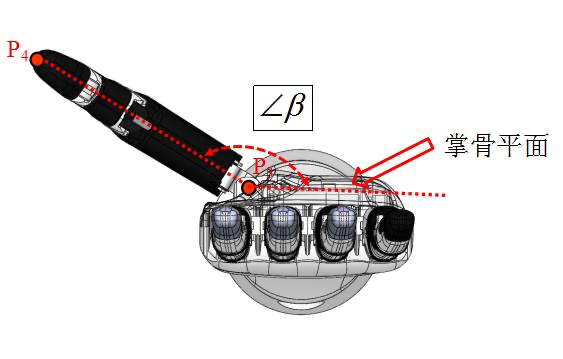 | 90°~165° |
- 傲意各自由度的角度定义和运动范围说明如下。
| 角度 | 图例说明 | 范围 |
|---|---|---|
| 食指 中指 无名指 小拇指 | 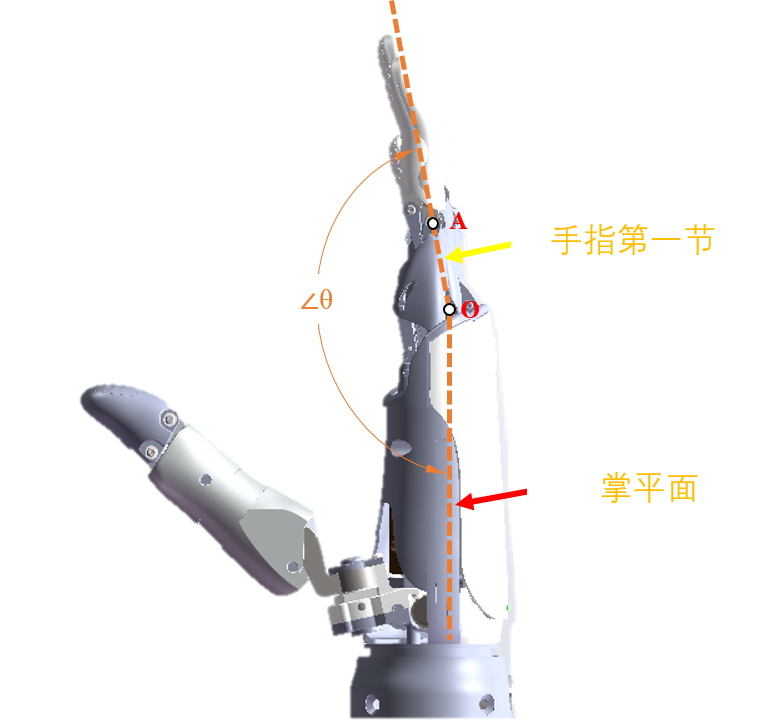 | 100.22°~178.37° 97.81° ~ 176.06° 101.38°~176.54° 98.84°~174.86° |
| 大拇指弯曲角度 | 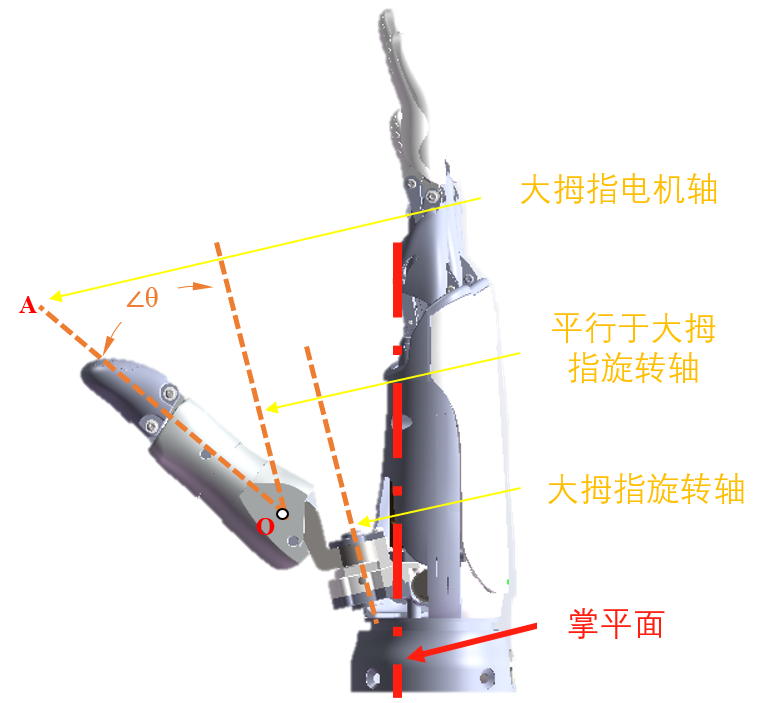 | 2.26° ~ 36.76° |
| 大拇旋转曲角度 | 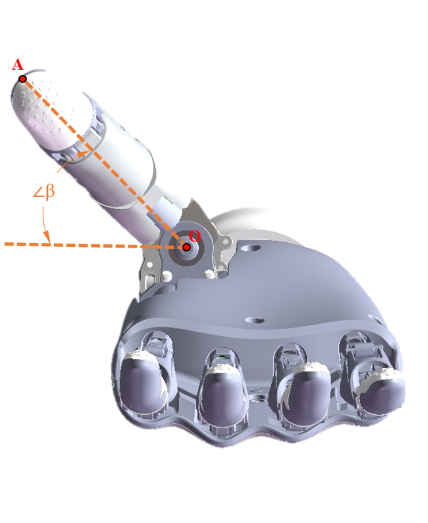 | 0° ~ 90° |
- 代码示例
输入
说明:设置灵巧手各手指动作,hand_angle表示手指角度数组,按照灵巧手厂商定义的角度做控制,例如:
- 傲意的角度范围为-32768到+32767。
- 因时的角度范围为0到+1000;
灵巧手角度的定义(int16):
- 傲意:第一指关节1的角度*100。
- 因时:0-1000,通过联系技术支持得到驱动器行程与角度关系表。
json
{"command":"hand_follow_angle","hand_angle":[100,100,200,300,400,500]}输出
设置成功
json
{
"command": "hand_follow_angle",
"set_state": true
}设置失败
json
{
"command": "hand_follow_angle",
"set_state": false
}灵巧手位置跟随控制hand_follow_pos
设置灵巧手跟随角度,灵巧手:6个主动自由度,自由度1(大拇指弯曲)、自由度2(食指)、自由度3(中指)、自由度4(无名指)、自由度5(小指)、自由度6(大拇指旋转),最高50Hz的控制频率。
注意
如果要使用此功能,需要联系技术支持发送定制的灵巧手固件升级包(傲意或者因时)。
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
hand_follow_pos | string | 设置手指角度。 |
- 代码示例
输入
说明:设置灵巧手各手指动作,hand_pos表示手指位置数组,按照灵巧手厂商定义的角度做控制,例如:
- 因时的位置范围为0-2000;
- 傲意的位置范围为0-65535。
json
{"command":"hand_follow_pos","hand_pos":[100,100,200,300,400,500]}输出
设置成功
json
{
"command": "hand_follow_pos",
"set_state": true
}设置失败
json
{
"command": "hand_follow_pos",
"set_state": false
}末端动作列表
睿尔曼机械臂末端动作列表相关功能,支持对末端动作进行全面管理与控制。
查询动作列表get_tool_action_list
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
get_tool_action_list | string | 查询动作列表。 |
page_num | int | 页码(全部查询时不传此参数)。 |
page_size | int | 每页大小(全部查询时不传此参数)。 |
vague_search | string | 模糊搜索 (传递此参数可进行模糊查询)。 |
- 输出参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
get_tool_action_list | string | 查询动作列表。 |
total_size | int | 动作总数。 |
list | object | 动作详细信息。 |
- 代码示例
输入
json
{"command":"get_tool_action_list"}输出
json
{
"action_list": [
{
"hand_pos": [0, 0, 0, 0, 0, 0],
"name": "睿尔曼"
},
{
"hand_pos": [0, 0, 0, 0, 0, 0],
"name": "111111111111111"
},
{
"hand_pos": [0, 0, 0, 0, 0, 0],
"name": "QN-触觉"
},
{
"hand_pos": [14, 19, 18, 9, 6, 4],
"name": "QN-夹爪闭合"
},
{
"hand_pos": [14, 19, 18, 9, 6, 4],
"name": "QN-夹爪闭合-1-1-1-1"
},
{
"hand_pos": [14, 19, 18, 9, 6, 4],
"name": "强脑-目标位置"
},
{
"hand_pos": [12],
"name": "张开-1-1-1-1"
},
{
"hand_pos": [12000],
"name": "夹爪闭合-1-1-1-1"
},
{
"hand_pos": [12],
"name": "张开-1-1-1"
},
{
"hand_pos": [12000],
"name": "夹爪闭合-1-1-1"
},
{
"hand_pos": [12],
"name": "张开-1-1"
},
{
"hand_pos": [12000],
"name": "夹爪闭合-1-1"
},
{
"hand_pos": [12],
"name": "张开-1"
},
{
"hand_pos": [12000],
"name": "夹爪闭合-1"
},
{
"hand_pos": [12000],
"name": "夹爪闭合"
},
{
"hand_pos": [12],
"name": "张开"
}
],
"command": "get_tool_action_list",
"total_size": 16
}运行指定末端动作run_tool_action
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
run_tool_action | string | 开始运行编号轨迹。 |
name | string | 运行指定name的动作,存在该动作即可运行。 |
- 输出参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
run_state | bool | true:开始运行。false运行失败。 |
run_tool_action | string | 轨迹文件运行到位。 |
- 代码示例
输入
开始运行动作“123”。
json
{
"command": "run_tool_action",
"name": "123"
}输出
开始运行成功。
json
{
"command": "run_tool_action",
"run_state": true
}开始运行失败。
json
{
"command": "run_tool_action",
"run_state": false
}末端动作结束后,返回运行结束命令。
json
{
"state": "current_trajectory_state",
"trajectory_state": true,
"device": 5,
"trajectory_connect": 0
}删除指定末端动作delete_tool_action
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
delete_tool_action | string | 删除指定名称的动作。 |
name | string | 删除的动作名称。 |
- 输出参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
delete_state | bool | true:成功。false失败。 |
- 代码示例
输入
删除轨迹2。
json
{
"command": "delete_tool_action",
"name": "pick"
}输出
删除成功。
json
{
"command": "delete_tool_action",
"delete_state": true
}删除失败。
json
{
"command": "delete_tool_action",
"delete_state": false
}保存动作save_tool_action
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
save_tool_action | string | 保存动作。 |
name | string | 保存的动作名称。 |
hand_pos | array | 位置。 |
hand_angle | array | 角度。 |
- 输出参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
save_state | bool | true:成功。false失败。 |
- 代码示例
输入
json
{
"command": "save_tool_action",
"name": "pick",
"hand_pos": [0, 0, 0, 0, 0, 0]
}
{
"command": "save_tool_action",
"name": "pick",
"hand_angle": [0, 0, 0, 0, 0, 0]
}输出
保存成功。
json
{
"command": "save_tool_action",
"save_state": true
}保存失败。
json
{
"command": "save_tool_action",
"save_state": false
}更新动作update_tool_action
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
update_tool_action | string | 更新动作。 |
name | string | 要更新的动作名称。 |
new_name | string | 新动作名称。 |
hand_pos | array | 位置。 |
hand_angle | array | 角度。 |
- 输出参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
update_state | bool | true:成功。false失败。 |
- 代码示例
输入
json
{
"command": "update_tool_action",
"name": "pick",
"new_name": "1",
"hand_pos": [0, 0, 0, 0, 0, 0]
}
{
"command": "update_tool_action",
"name": "pick",
"name": "1",
"hand_angle": [0, 0, 0, 0, 0, 0]
}输出
更新成功。
json
{
"command": "update_tool_action",
"update_state": true,
}更新失败。
json
{
"command": "update_tool_action",
"update_state": false,
}轨迹结束返回标志current_trajectory_state
轨迹为当前轨迹。
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
current_trajectory_state | string | 当前轨迹结束返回标志。 |
device | int | 0: 关节、1: 夹爪、2: 灵巧手、3: 升降机构、4: 扩展关节、5: 末端工具动作、其他: 保留。 |
- 代码示例
实现:当前轨迹到达目标。
json
{
"state": "current_trajectory_state",
"trajectory_state": true,
"device": 0
}