常见问题:
快速使用常见问题
基础使用常见问题
1.如果要基于机械臂进行控制二次开发,用户需要具备哪些基础技术?
如果用户直接使用我们封装好的API,则只能在Linux/Windows环境下使用C/C++/C#/Python/MATLAB工程调用,或者使用ROS操作系统。如果用户使用JSON协议,则灵活性会高很多。对用户的系统和编程语言没有任何限制,只要能根据协议发送出固定的字符串即可,常用于PLC、安卓、IOS等平台。
2.机械臂可以在安卓平台/PLC(可编辑控制器)控制吗?
第三代控制器支持WEB端示教器,建立网络连接后打开浏览器即可访问,在安卓、IOS、WIN、LINUX均可以访问。 对于机械臂来说,只要接收到JSON格式的字符串就可以进行控制,收发字符串可以使用网口,WIFI,485等方式。使用安卓、PLC、单片机等可以直接发送JSON格式的字符串进行控制,也可使用MODBUS-RTU/TCP控制机械臂。
3.系统信息界面提示超限位,错误无法清除怎么办?
解决思路:先让超出限位关节拖回到限位内,清除关节报错信息。操作步骤如下:
- 在机械臂示教界面查看当前关节角度;
- 在配置-机械臂配置-安全配置中选择对应关节,调整关节限位至大于当前角度;
- 在系统信息界面清除关节错误;
- 在配置-机械臂配置-安全配置中选择对应关节,点击上使能按钮;
- 在机械臂示教界面,控制关节回到限位内;
- 在配置-机械臂配置-安全配置中选择对应关节,点击掉使能按钮,将限位恢复为初始值,重新上使能即可。
关于机械臂系统常见问题
1.机械臂编码器是什么类型的编码器,单圈编码器还是多圈编码器?
绝对双编码器,输入输出端各一个;最后一个关节为多圈编码器,其他为单圈编码器。精度0.001°。
2.什么是透传?透传的周期是多少?用途是什么?
透传是指用户自己使用上位机进行轨迹规划,然后将各关节的角度直接下发给控制器,不经过控制器的处理,各关节直接运行。机械臂运行的效果直接依赖于用户轨迹规划的水平。
第二代控制器透传周期: WiFi透传周期最快20ms,普通网口最快20ms,USB接口最快10ms。高速网口,目前可做到10ms。
第三代控制器透传周期: 可达到5ms,如果上位机实时性足够高,可以实现2ms透传。
主要用于验证用户算法或者结合视觉,在非结构环境下做动态轨迹规划实现抓取或者避障。
3.机械臂控制器和末端的RS485接口有什么区别?
控制器485支持控制机械臂,也可以通过指令切换,对外支持标准MODBUS-RTU协议,可以控制外设,例如夹爪,电动吸盘等。末端的485仅支持对外控制,无法控制机械臂。
4.机械臂的末端可以接什么型号的执行器?
机械臂末端可对外输出12V/24V,最大输出电流1.5A。具备RS485通信接口,可支持标准的Modbus RTU协议的设备。
5.设置工具坐标系的质量和质心参数影响什么?
碰撞检测、和电流环拖动的手感。
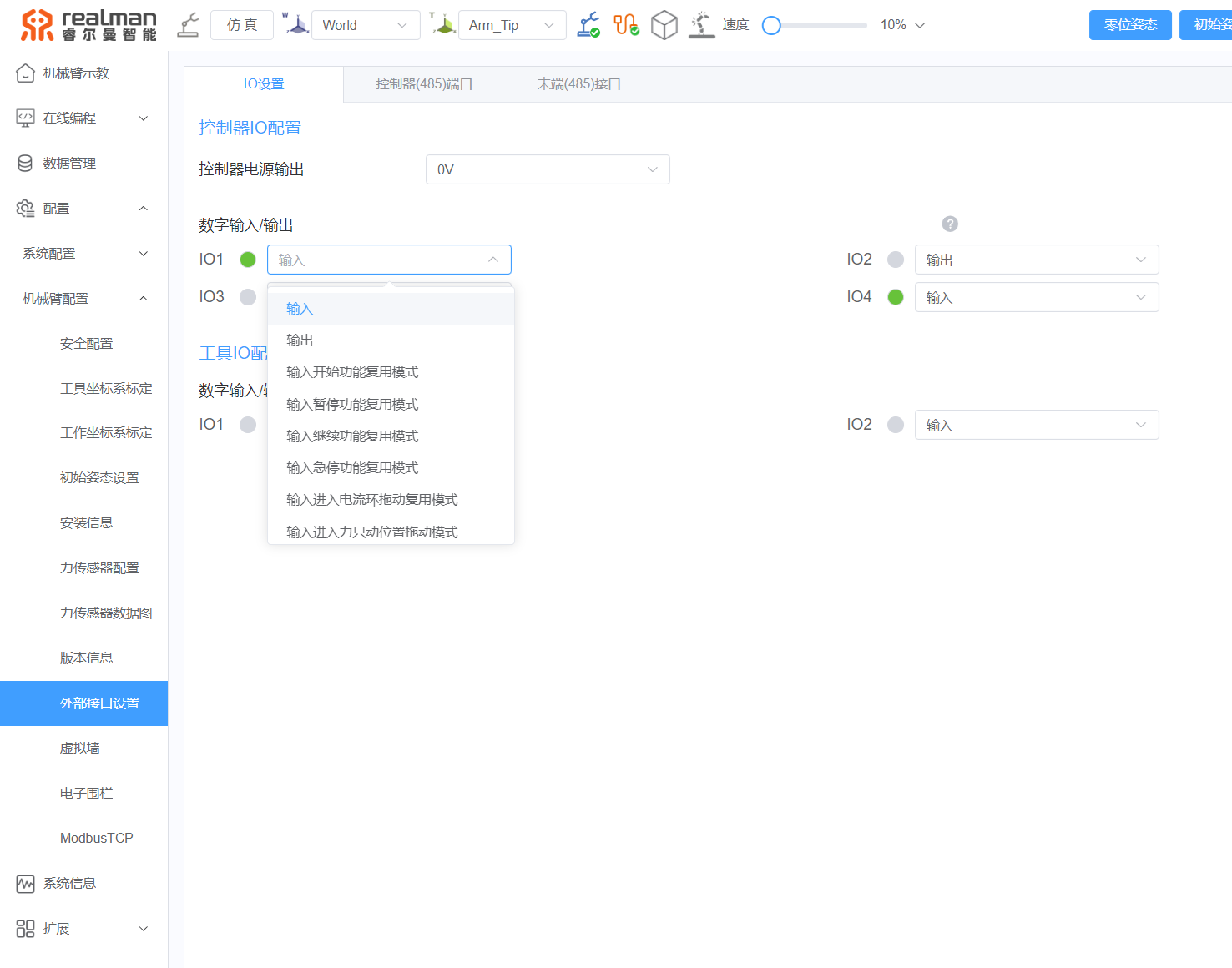
6.第三代控制器IO复用功能有哪几种?
16芯线中的IO具备复用功能,可以通过程序指令或者web端示教器切换为:具体操作方法如下:点击IO配置界面的下拉列表,选择对应的复用功能。
7.什么是机械臂DH参数?
DH 参数一般使用四个参数:X轴旋转,一般使用α表示、X轴平移,一般使用a表示、Z轴旋转,一般使用θ表示Z轴平移,一般使用d表示;根据轴的先后顺序分为标准DH参数和改进DH参数。
标准DH参数:两个连杆坐标系变换是先绕z轴转动、平移,再绕x轴转动、平移。即X-Z顺序,先转动后平移。
改进DH参数:两个连杆坐标系变换是先绕X轴转动、平移,再绕Z轴转动、平移。即Z-X顺序,先转动后平移。
8.力控和电流环控制的关系是什么?
机械臂关节内部没有扭矩传感器,我们是通过电流环实现关节力控的,即针对我们的机械臂而言,电流环控制等同力控。
9.RM机械臂使用寿命怎么样?
机械臂额定负载下的连续运行的寿命是5万小时。目前已取得上海国家机器人检测中心做MTBF检测认证。
电路连接常见问题
1.机械臂的供电电压和电流需求是怎样的?
电源电压范围可选20~27V,极限可达到30V,建议使用600W以上,且具有打嗝模式、恒流输出1s 功能的开关电源。我司内部使用电源网址,有需要可自行购买。
https://detail.tmall.com/item.htm
2.机械臂控制输出时,外部连接的继电器无反应,如何处理?
机械臂控制器的数字输出接口,输出电流为2mA,无法带动继电器等负载,需通过一个模块进行转换。如果需要控制大功率设备,如:电机、灯泡、继电器、电磁阀等,可以选配场效应管模块。
https://item.taobao.com/item.htm
3.机械臂外部线缆的类型?以及各类型的详细规格?
外部线缆包含2芯电源线与16芯线,详细规格如下:
| 线缆类型 | 核心规格 | 单芯外径 | 总外径 | 线长 | 折弯半径 |
|---|---|---|---|---|---|
| 2芯电源线 | 2.5mm²(约等同于AWG13) | 3.5mm | 8.5mm | 2m(2000mm) | 50mm |
| 16芯线 | AWG26 | 1mm | 8.5mm | 2m(2000mm) | 50mm |
通讯配置常见问题
1.更改设备IP及设备连接
第二代控制器:
使用ZLVirCom软件进行修改(如有需要联系我司技术支持)。
- 打开机械臂,通过网线连接网口。
- 打开ZLVirCom软件,点击“设备管理”>“编辑设备”>“修改设置”。保存设置。
第三代控制器:
默认IP地址是192.168.1.18,可以发送JSON协议或者在示教器中进行修改。