本体参数:
RX75系列参数及D-H模型 基础参数
| 参数名 | 参数值 | |
|---|---|---|
| 基础参数 | 自由度 | 7 |
| 构型 | 仿人构型 | |
| 关节制动器形式 | 1~4关节硬抱闸 5~7关节软抱闸 | |
| 工作半径/mm | 六维力版: 709.2 六维力+视觉版:732 | |
| 有效额定负载/kg | 5 | |
| 自重/kg | 六维力版: 8.2 六维力+视觉版:8.4 | |
| 重复定位精度/mm | ±0.2 | |
| TCP线速度/m/s | ≤2.2 | |
| 典型功率/W | ≤200 | |
| 瞬时峰值功率/W | ≤1000 | |
| 安装角度 | 侧装:Ry=-90 ° | |
| 底座尺寸/mm | φ102 | |
| 材质 | 铝合金/ABS | |
| 末端相机 | D405(视觉版标配) | |
| 环境适应性 | 工作温度/℃ | 0-45 |
| 工作湿度 | 25~85%无结露 | |
| 运动角度范围/° | J1 | -173~+173 |
| J2 | -35~+178 | |
| J3 | -173~+173 | |
| J4 | -130~+15 | |
| J5 | -173~+173 | |
| J6 | -55~+55 | |
| J7 | 左臂:-109~+35 右臂:-35~+109 | |
| 最大角速度/ °/s | J1 | 180 |
| J2 | 180 | |
| J3 | 225 | |
| J4 | 225 | |
| J5 | 225 | |
| J6 | 225 | |
| J7 | 225 | |
| 力控指标(仅六维力支持) | 六维力量程 | 200N/7N·m |
| 六维力精度 | ±0.5%FS | |
本体参数
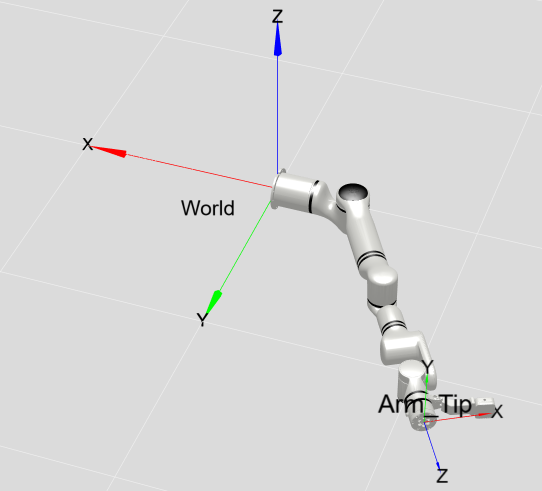
MDH模型坐标系:
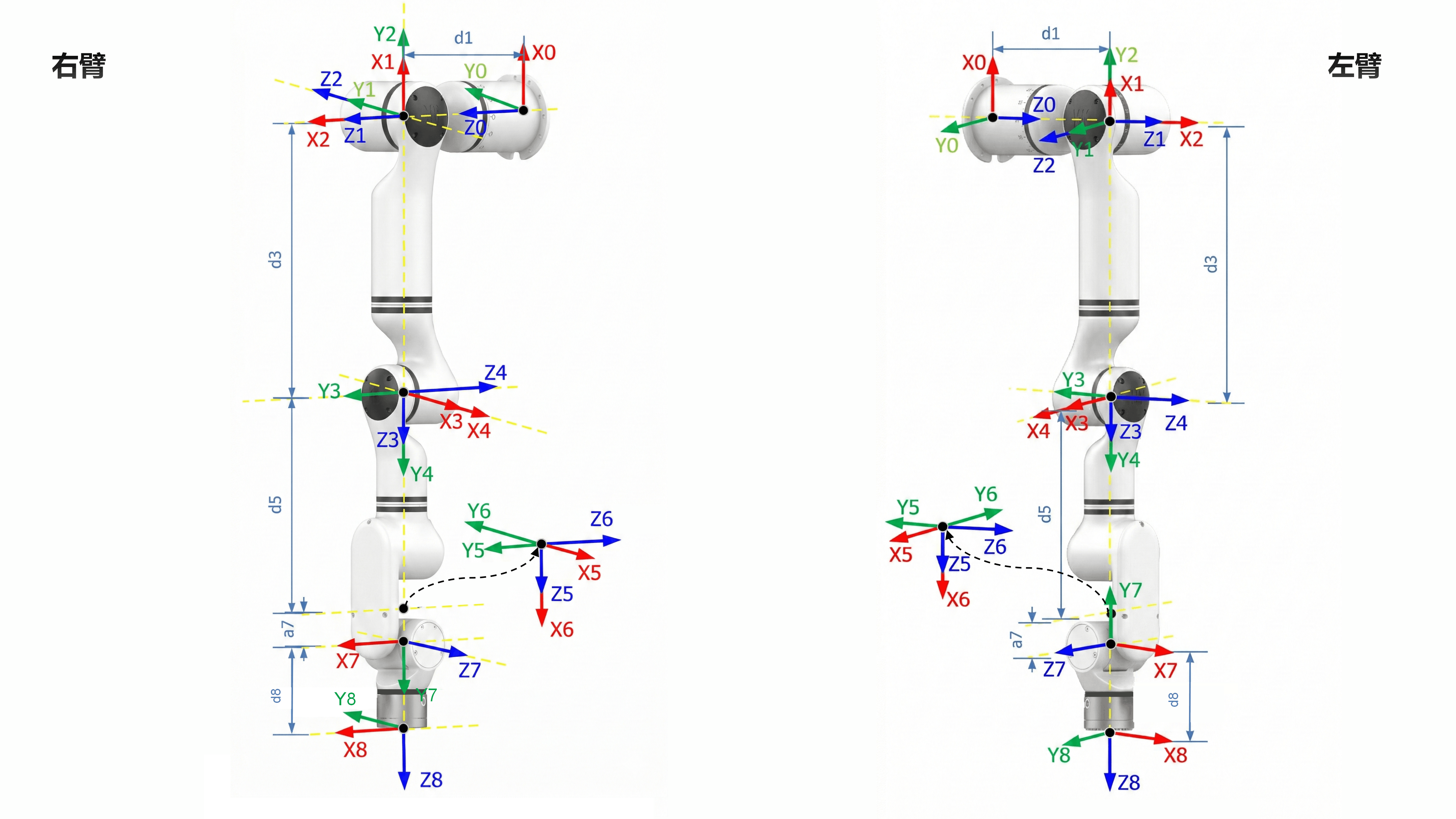
左臂RXL75系列MDH参数(改进D-H参数):
安装信息:Ry=-90°
| joint_id(i) | 备注 | ||||
|---|---|---|---|---|---|
| 1 | 0 | 0 | 191.5 | 0 | |
| 2 | 0 | -90 | 0 | -90 | |
| 3 | 0 | 90 | 322 | 90 | |
| 4 | 0 | 90 | 0 | 0 | |
| 5 | 0 | -90 | 275.5 | 0 | |
| 6 | 0 | 90 | 0 | 90 | |
| 7 | 15.5 | 90 | 0 | 90 | |
| 8 | 0 | 90 | 96.2 | 0 | (6FB)一体化六维力 |
| 119 | (6FB-V)一体化六维力+视觉 |
说明: offset为机械零位与建模零位的偏差, 即模型角度 = 关节角度 + offset.
右臂RXR75系列MDH参数(改进D-H参数):
安装信息:Ry=-90°
| joint_id(i) | 备注 | ||||
|---|---|---|---|---|---|
| 1 | 0 | 0 | 191.5 | 0 | |
| 2 | 0 | -90 | 0 | -90 | |
| 3 | 0 | 90 | 322 | -90 | |
| 4 | 0 | 90 | 0 | 0 | |
| 5 | 0 | -90 | 275.5 | 0 | |
| 6 | 0 | 90 | 0 | 90 | |
| 7 | 15.5 | 90 | 0 | -90 | |
| 8 | 0 | -90 | 96.2 | 0 | (6FB)一体化六维力 |
| 119 | (6FB-V)一体化六维力+视觉 |
说明: offset为机械零位与建模零位的偏差, 即模型角度 = 关节角度 + offset.
RX75系列连杆动力学参数
左臂:
| joint_id(i) | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| 1.559 | 1.394 | 1.117 | 0.673 | 1.13 | 0.559 | 0.483 | |
| -0.488 | -0.112 | 0.032 | -0.001 | -0.001 | 13.909 | 20.024 | |
| -13.727 | -148.134 | 15.649 | 85.449 | -14.741 | -1.02 | -71 | |
| -10.765 | 4.111 | -11.225 | 4.844 | -80.627 | 3.245 | 4.396 | |
| 3136.43 | 37530.89 | 2171.46 | 6216.32 | 9937.67 | 360.632 | 3254.6 | |
| 41.478 | 22.717 | -0.149 | 0.007 | -0.063 | -8.175 | -841.422 | |
| -1.145 | 2.041 | -4.264 | -0.007 | 0.082 | -2.382 | 0.811 | |
| 2483.576 | 1068.573 | 1609.222 | 359.898 | 9288.177 | 402.132 | 1355.093 | |
| 78.947 | -47.546 | -83.494 | 48.906 | 899.812 | -1.155 | -17.714 | |
| 1970.778 | 37444.566 | 1253.185 | 6174.838 | 1337.425 | 421.185 | 4268.534 |
右臂:
| joint_id(i) | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| 1.559 | 1.384 | 1.117 | 0.665 | 1.130 | 0.559 | 0.483 | |
| 0.018 | -0.197 | -0.154 | 0.000 | 0.000 | 13.908 | 20.008 | |
| -13.670 | -149.264 | -15.652 | 86.537 | 14.739 | -1.017 | 71.000 | |
| -10.100 | -3.905 | -11.241 | -4.411 | -80.627 | -3.245 | 4.302 | |
| 3144.289 | 37594.181 | 2170.993 | 6201.568 | 9937.599 | 360.168 | 3254.587 | |
| -0.096 | 42.369 | 6.949 | -0.116 | -0.050 | -8.300 | 841.524 | |
| -2.729 | -3.602 | 2.336 | -0.007 | -0.006 | 2.383 | -0.805 | |
| 2483.576 | 1049.311 | 1609.222 | 345.166 | 9283.329 | 402.131 | 1355.088 | |
| 22.265 | 56.439 | 84.454 | -48.523 | -899.736 | 1.103 | 15.095 | |
| 1953.830 | 37524.126 | 1253.793 | 6170.874 | 1337.249 | 421.185 | 4268.521 |
说明:
为连杆质量, 单位为 为连杆质心x坐标, 单位为 为连杆质心y坐标, 单位为 为连杆质心z坐标, 单位为 , , , , , 为连杆坐标系下描述的主惯量, 单位为
备注:
- 以上数据来源为CAD设计值
- 如需质心坐标系下的惯性参数, 使用平行移轴定理即可, 计算方法如下所述.
假设有一输出坐标系为坐标系
式中:
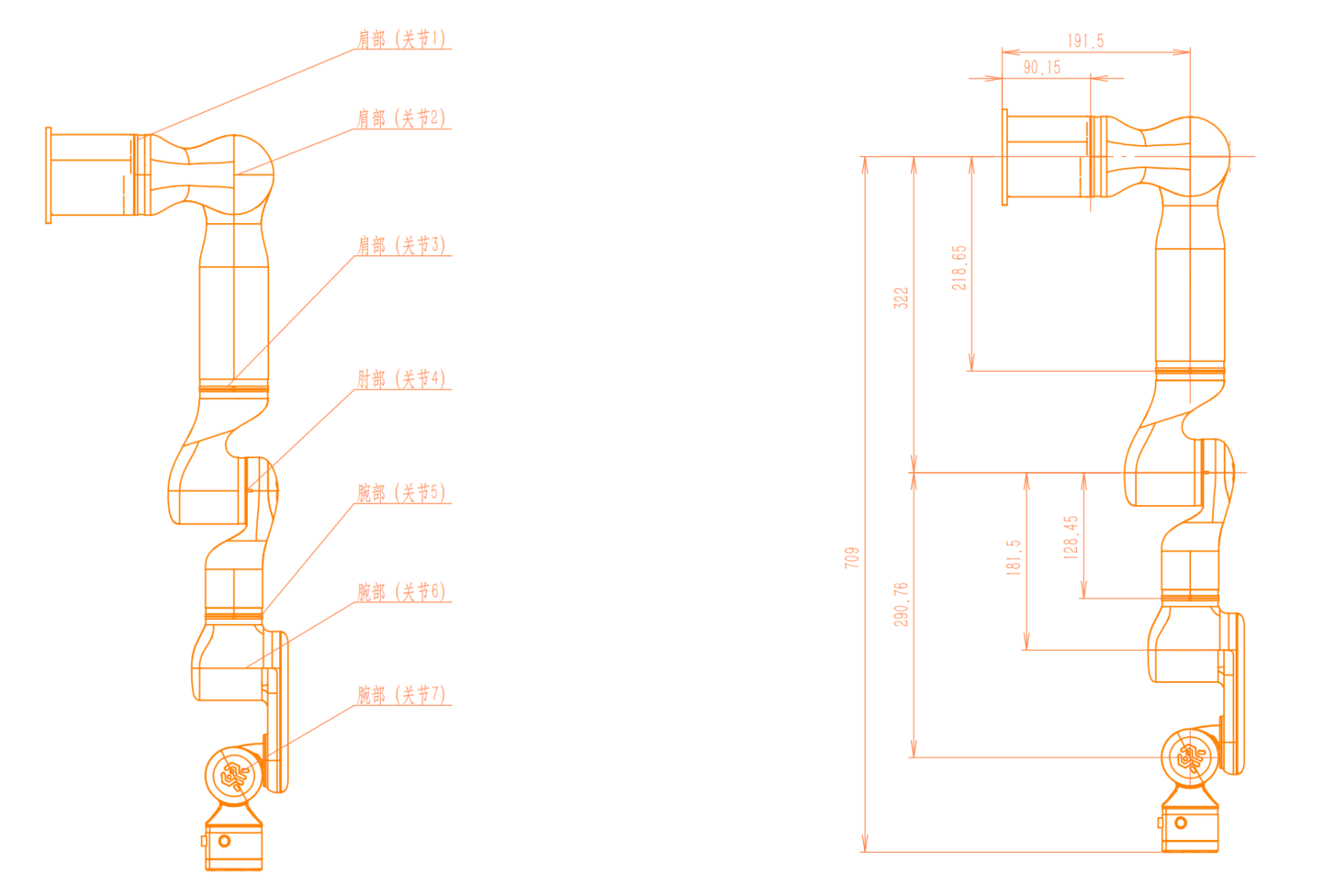
关节分布和尺寸说明
RX75机器人本体模仿人的手臂,共有7个旋转关节,每个关节表示1个自由度。如下图所示,机器人关节包括肩部(关节1),肩部(关节2),肩部(关节3),肘部(关节4),腕部(关节5),腕部(关节6)和腕部(关节7)。
RXBL-关节分布图:
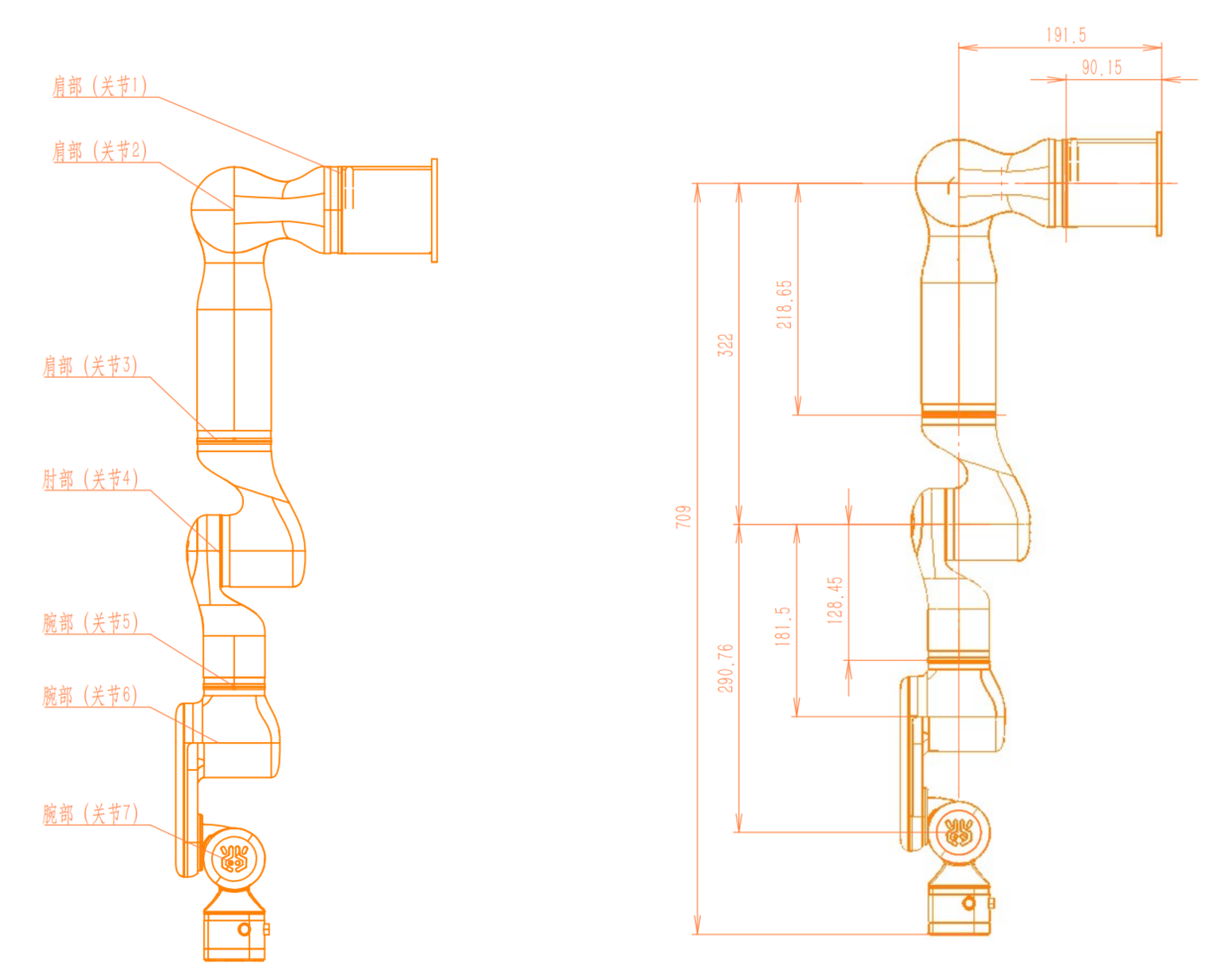
RXBR-关节分布图:
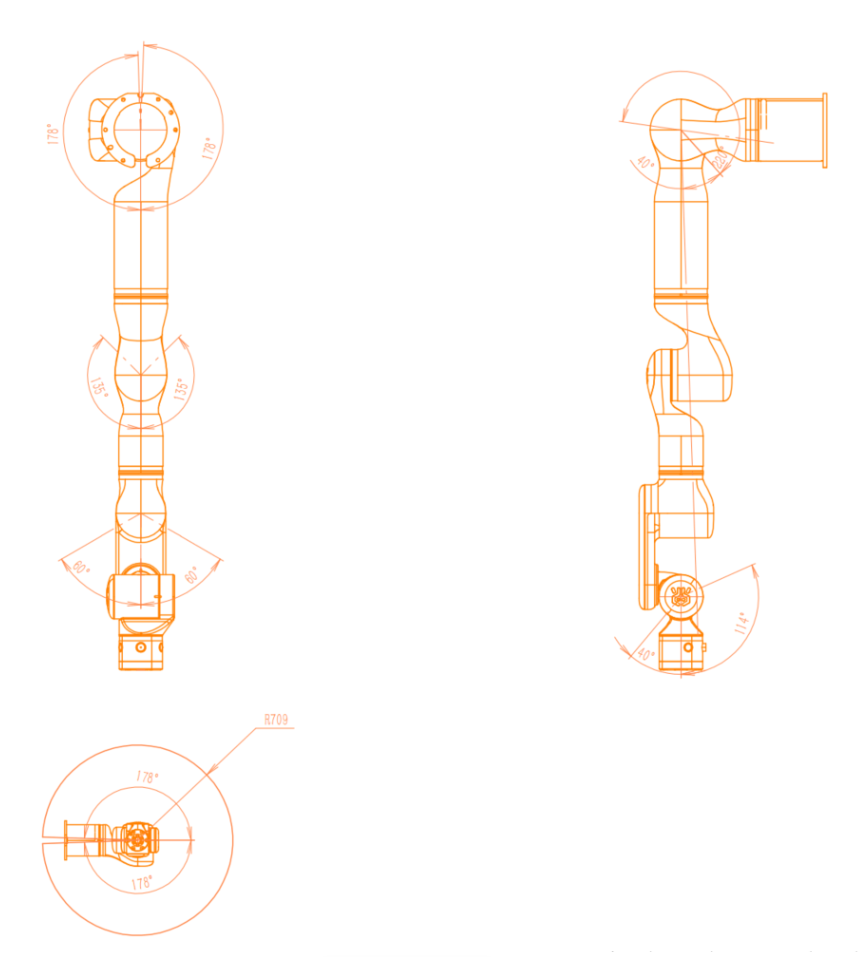
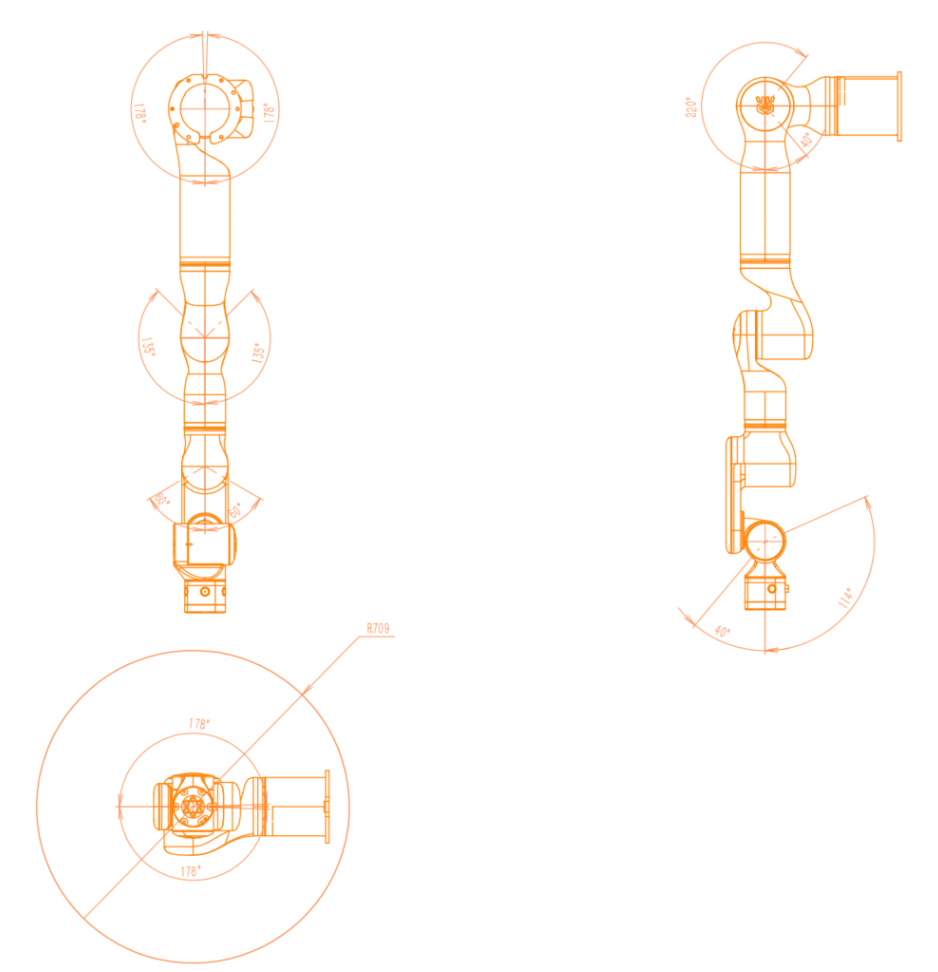
工作空间
RX75 运动范围,除去基座正上方和正下方的圆柱空间,工作范围为半径709mm的球体(视觉版工作范围为半径732mm 的球体)。选择机器人安装位置时,务必考虑机器人正上方和正下方的圆柱体空间,尽可能避免将工具移向圆柱体空间。另外,在实际应用中,关节1转动范围:±173 °,关节2转动范围:-35- 178 °,关节3转动范围:±173 °,关节4转动范围:-130-15°,关节5转动范围:±173 °,关节6转动范围:± 55 °,关节7 左臂转动范围:-109-35 °,关节7 右臂转动范围:-35-109 °。
RXBL-工作空间图:
RXBR-工作空间图:
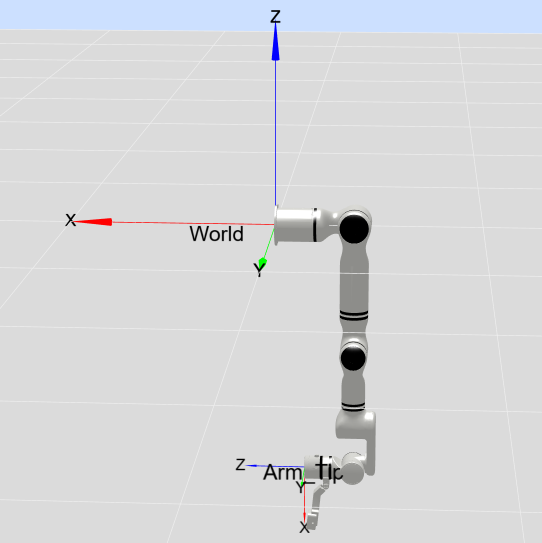
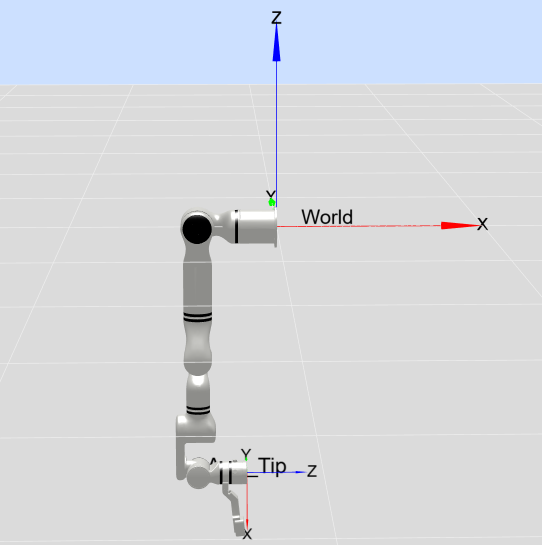
运动奇异点
左臂:RXL75
奇异类型1
当q4=0时,即点位格式为[x,x,x,0,x,x,x]。
示意点位1:[-90,30,-90,0,90,0,0],如下图所示:
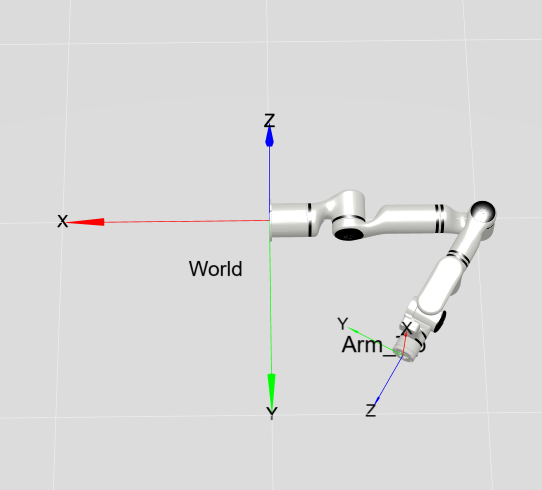
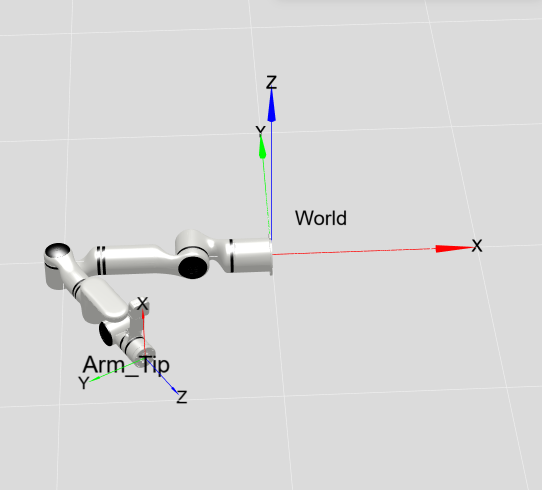
示意点位2:[0,0,90,0,-90,0,-90],如下图所示:
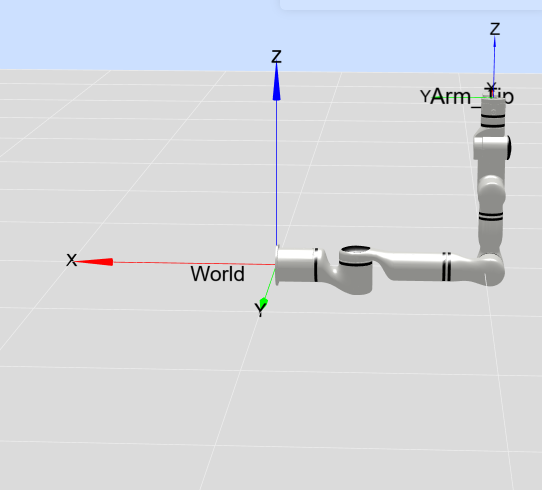
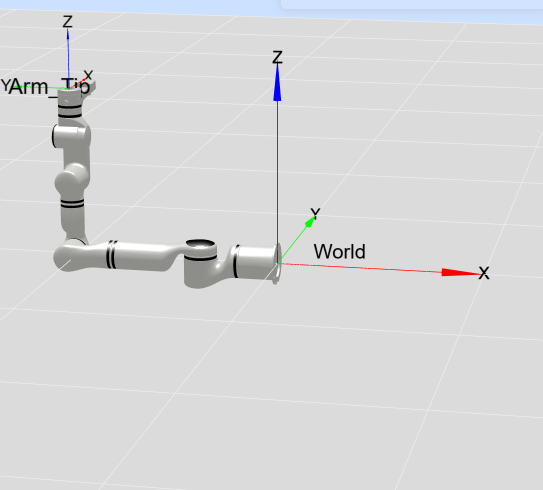
奇异类型2
当q2=90且q3=0(或q3=180)时,即点位格式为[x,90,0或180,x,x,x,x]。
示意点位1:[-90,90,0,-90,0,0,0],如下图所示:
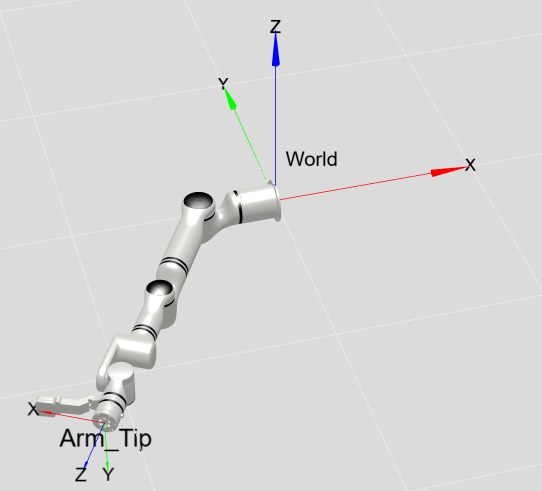
示意点位2:[0,90,0,-120,0,0,0],如下图所示:
右臂:RXR75
奇异类型1
当q4=0时,即点位格式为[x,x,x,0,x,x,x]。
示意点位1:[90,30,-90,0,90,0,0],如下图所示:
示意点位2:[0,0,90,0,-90,0,90],如下图所示:
奇异类型2
当q2=90且q3=0(或q3=180)时,即点位格式为[x,90,0或180,x,x,x,x]。
示意点位1:[90,90,0,-90,0,0,0],如下图所示:
示意点位2:[0,90,0,-120,0,0,0],如下图所示:
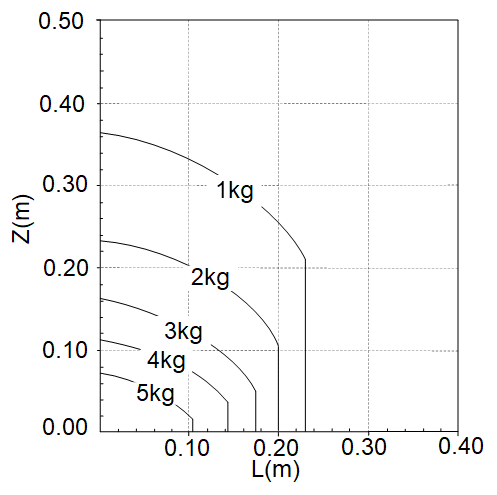
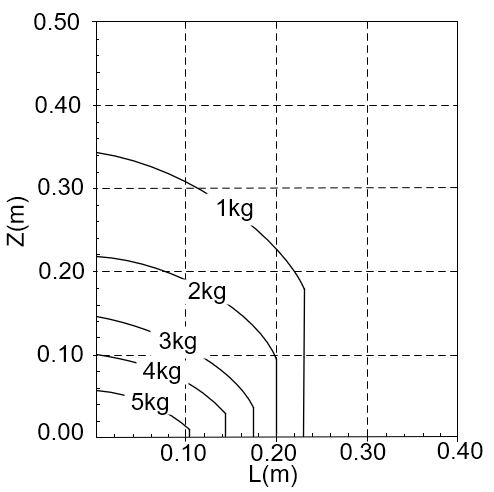
负载曲线图
下图分别表示RX75-6FB和RX75-6FB-V 机械臂末端负载曲线图。其中L是末端负载的质心相对于末端法兰平面的径向距离,Z是相对于末端法兰平面的法向距离。