本体参数:
ECO62-B系列参数及D-H模型 基础参数
| 参数名 | 参数值 | |
|---|---|---|
| 基础参数 | 自由度 | 6 |
| 关节制动器形式 | 1~3 关节硬抱闸 4~6 关节软抱闸 | |
| 工作半径/mm | 355 | |
| 有效负载/kg | 1 | |
| 自重/kg | 3.3 | |
| 重复定位精度/mm | ±0.01 | |
| TCP线速度/m/s | ≤1.3 | |
| 典型功率/W | ≤100 | |
| 峰值功率/W | ≤200 | |
| 底座尺寸/mm | φ102 | |
| 材质 | 铝合金/ABS | |
| 环境适应性 | 工作温度/℃ | 0-45 |
| 工作湿度 | 25~85%无结露 | |
| 运动角度范围/° | J1 | -178~+178 |
| J2 | -169~+104 | |
| J3 | -151~+133 | |
| J4 | -172~+172 | |
| J5 | -172~+172 | |
| J6 | -360~+360 | |
| 最大角速度/ °/s | J1 | 180 |
| J2 | 180 | |
| J3 | 180 | |
| J4 | 150 | |
| J5 | 150 | |
| J6 | 150 | |
本体参数
MDH模型坐标系:
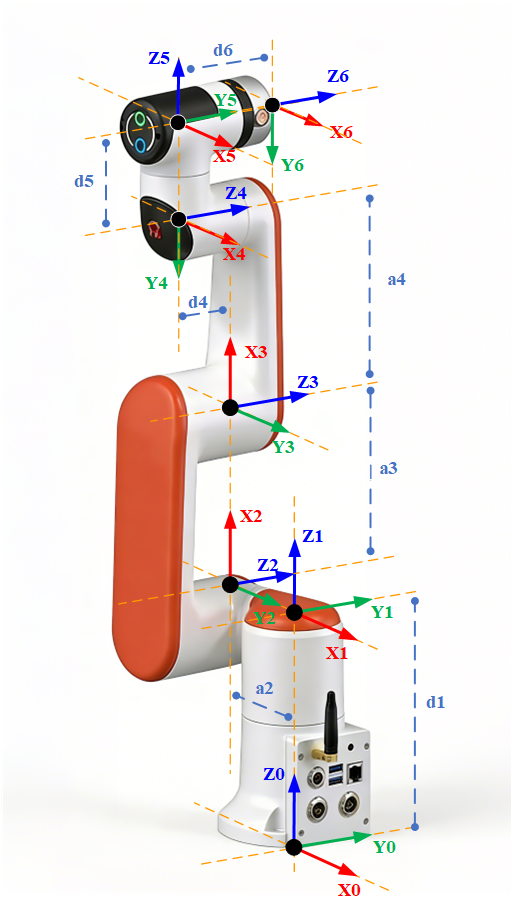
ECO62-B系列MDH参数(改进D-H参数):
| 关节编号(i) | 备注 | ||||
|---|---|---|---|---|---|
| 1 | 0 | 0 | 136 | 0 | |
| 2 | -70 | -90 | 0 | -90 | |
| 3 | 148 | 0 | 0 | 0 | |
| 4 | 136 | 0 | -58.5 | 90 | |
| 5 | 0 | 90 | 71 | 0 | |
| 6 | 0 | -90 | 70.7 | 0 | (B)标准末端(03关节款) |
ECO62-B系列连杆动力学参数
| 关节编号 | 备注 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1341.83707 | -1141.53218 | 4.12154 | 3723.08113 | -0.70646 | 3980.45116 | -36.0000 | -13.4700 | -9.0800 | 1.19575 | |
| 2 | 1943.5495 | -1.2359 | -3235.9682 | 15599.5218 | -0.5731 | 14116.9907 | 119.8000 | 0 | -39.6000 | 0.8055 | |
| 3 | 185.576 | -2.1952 | -249.1234 | 5023.694 | -0.196 | 5034.4334 | 94.4000 | 0 | -2.0000 | 0.413 | |
| 4 | 166.6853 | -0.523 | -0.3532 | 73.6738 | -0.808 | 158.8891 | -0.1000 | -16.8000 | 3.4000 | 0.2386 | |
| 5 | 224.9708 | -0.662 | -0.3276 | 93.8259 | -0.5701 | 211.4858 | -0.1000 | 16.8000 | -4.3000 | 0.2633 | |
| 6 | 32.2687 | -0.0503 | -0.0155 | 31.9264 | -0.034 | 24.373 | 0 | -0.1000 | -14.6000 | 0.0667 | 未端法兰 |
说明:
为连杆质量, 单位为 为连杆质心x坐标, 单位为 为连杆质心y坐标, 单位为 为连杆质心z坐标, 单位为 , , , , , 为连杆坐标系下描述的主惯量, 单位为
备注:
- 以上数据来源为CAD设计值
- 如需质心坐标系下的惯性参数, 使用平行移轴定理即可, 计算方法如下所述.
假设有一输出坐标系为坐标系
式中:
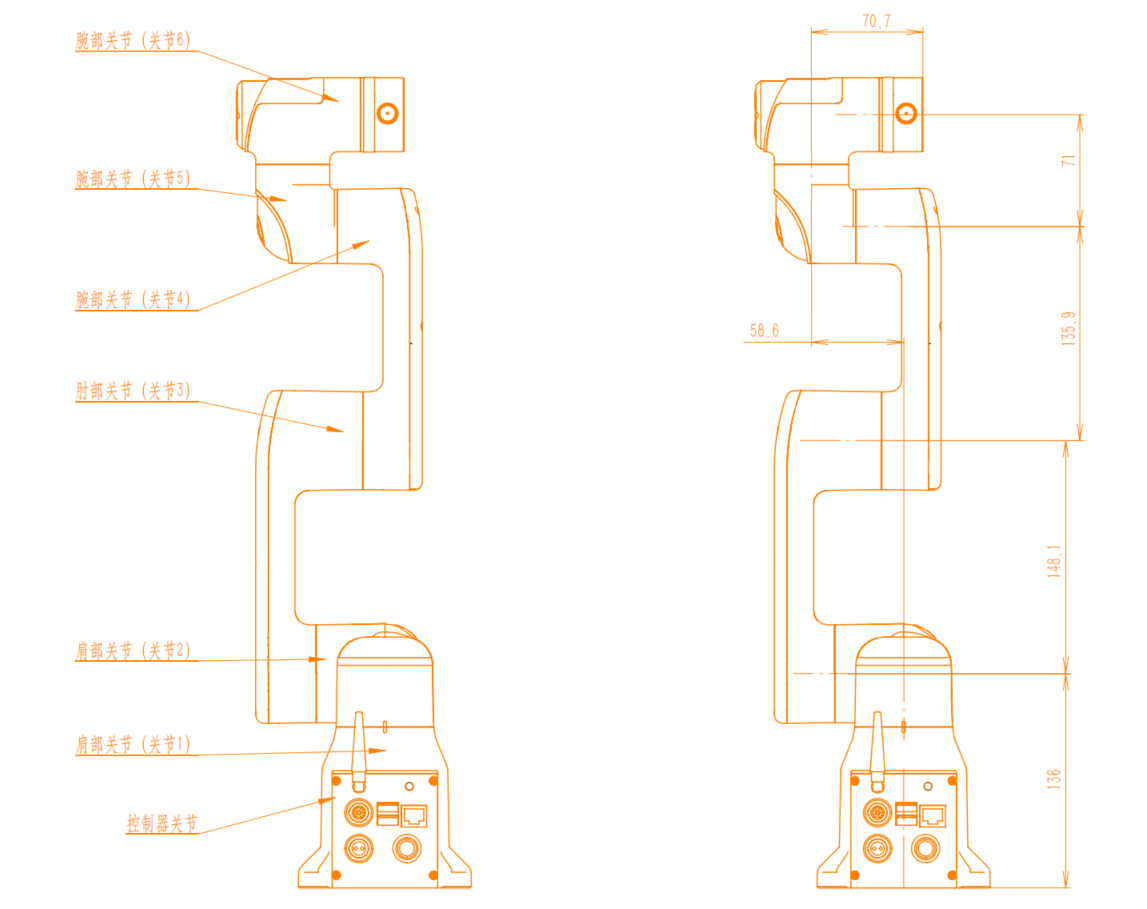
关节分布和尺寸说明
ECO62 机器人本体,共有 6 个旋转关节,每个关节表示1个自由度。如下图所示,机器人关节包括肩部(关节1),肩部(关节2),肩部(关节3),肘部(关节4),腕部(关节5),腕部(关节6)。
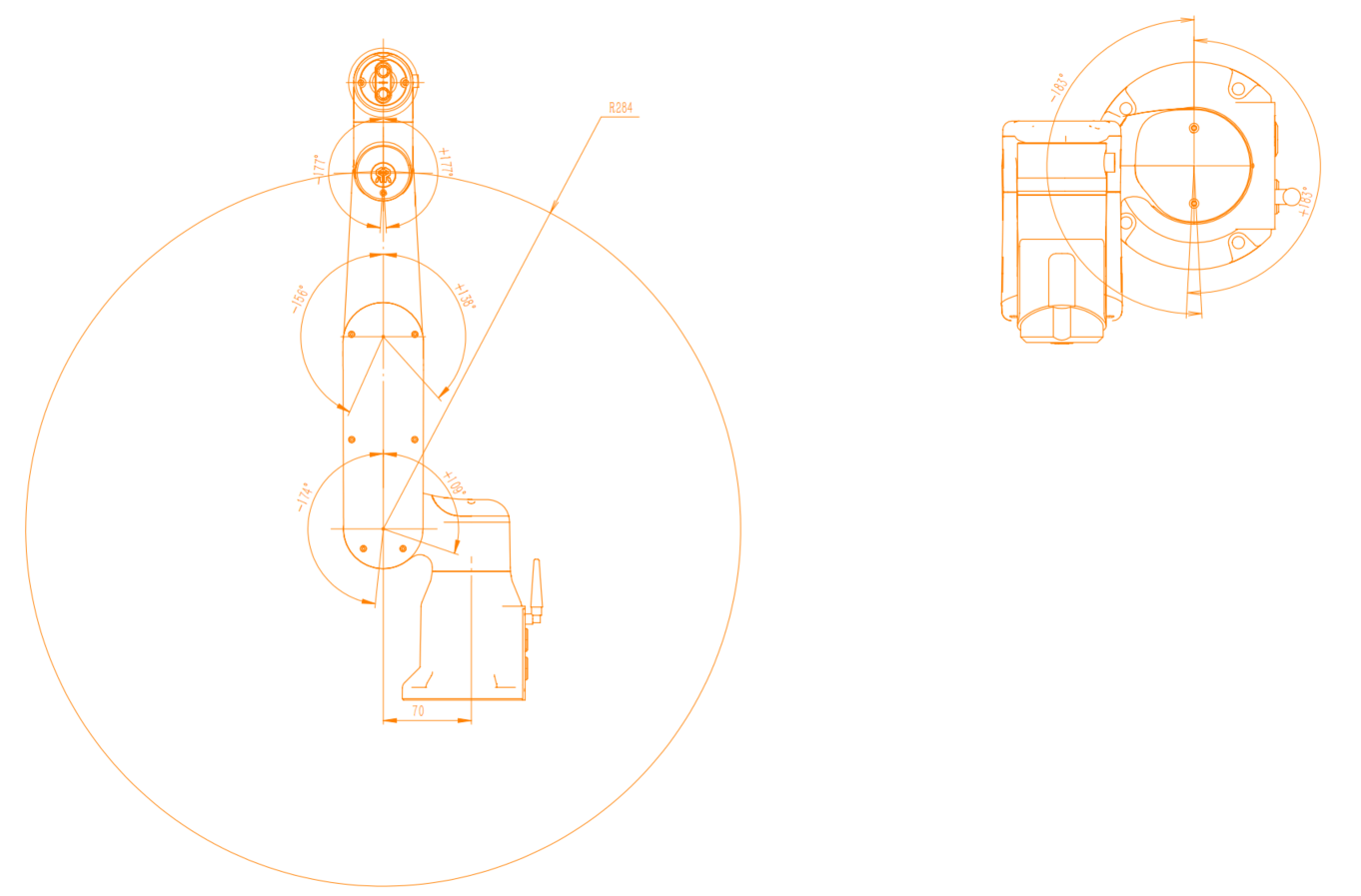
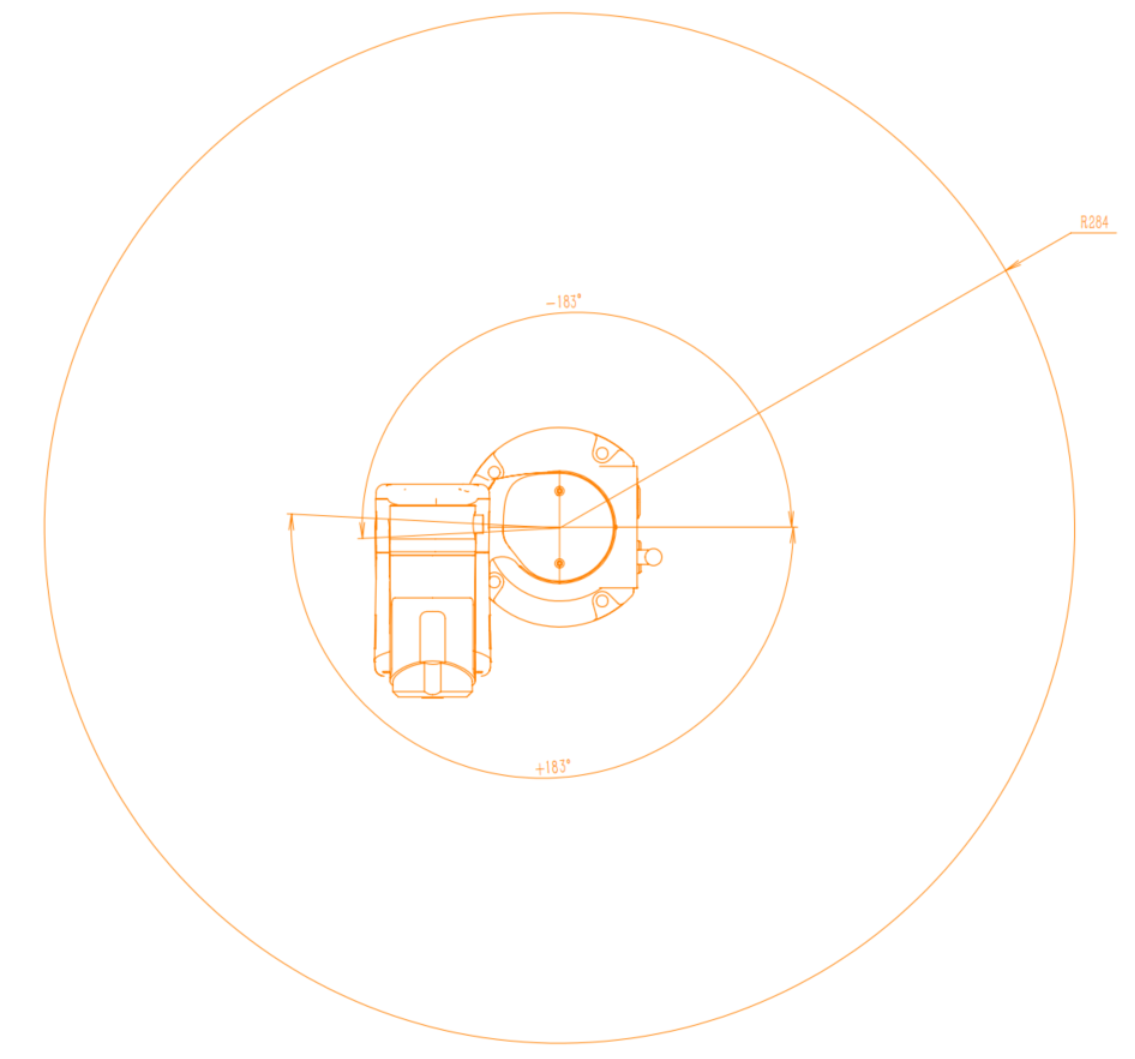
工作空间
ECO62 运动范围,除去基座正上方和正下方的圆柱空间,工作范围为半径 355mm的球体。选择机器人安装位置时,务必考虑机器人正上方和正下方的圆柱体空间,尽可能避免将工具移向圆柱体空间。另外,在实际应用中,关节1转动范围:±178 °,关节2转动范围:-169 ° ~ 104 °,关节3转动范围:-151 ° ~ 133 °,关节4转动范围:±172 °,关节5转动范围:±172 °,关节6转动范围:± 360 °。
运动奇异点
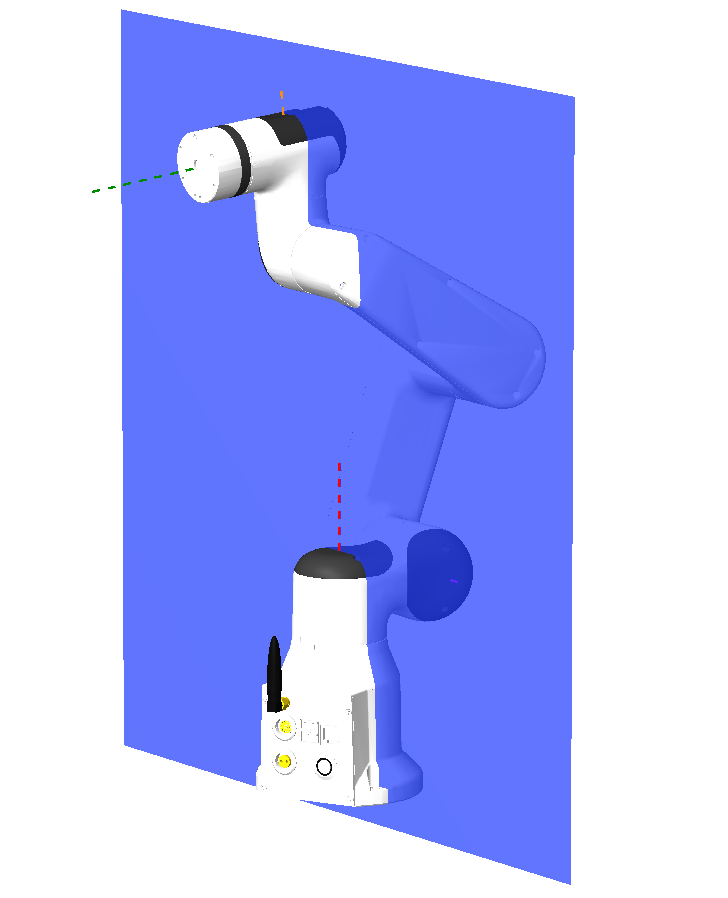
奇异类型1:肩部奇异
当关节5和关节6的轴线交点位于通过关节1轴线且平行关节2轴线的平面上时,出现肩部奇异。
肩部奇异如下图所示,图中蓝色平面为通过关节 1 轴线且平行于关节 2 轴线的平面。
示意点位1:[-24.6,-13.199,77.911,-51.913,1.997,1.110],如下图所示:
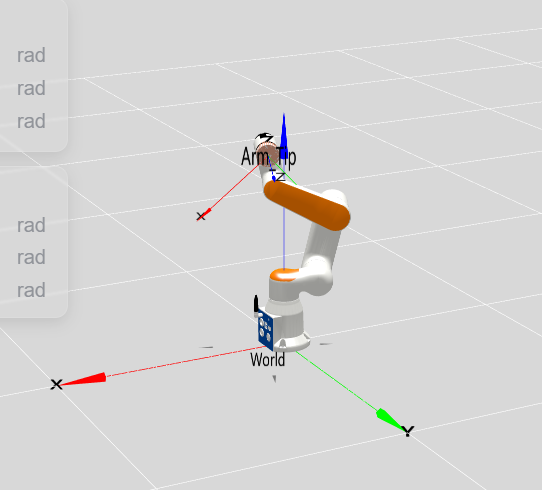
奇异类型2:肘部奇异
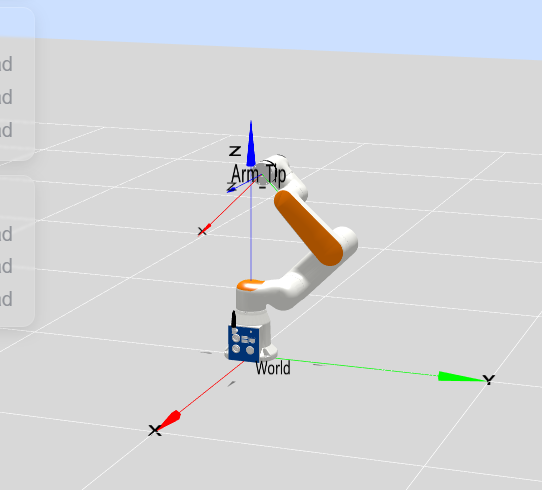
当关节5和关节6的轴线交点位于由关节2和关节3的轴线组成的平面上时,q3=0,即点位格式为[x,x,0,x,x,x],出现肘部奇异。
示意点位1:[30,30,0,30,30,30],如下图所示:
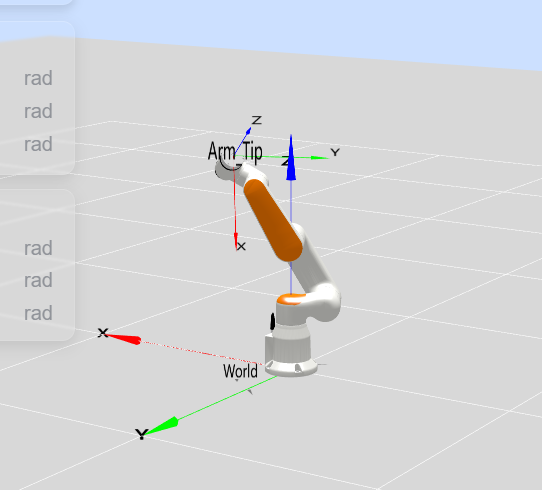
奇异类型3:腕部奇异
当关节4和关节6的轴线平行时,q5=0,即点位格式为[x,x,x,x,0,x],出现腕部奇异。
示意点位1:[-90,-45,90,0,0,0],如下图所示:
奇异类型4:边界奇异
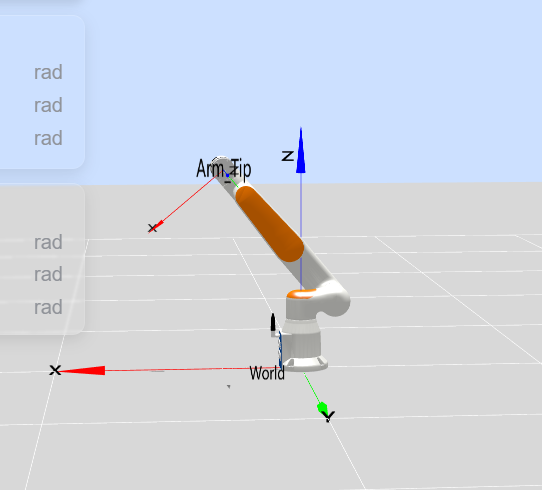
当机械臂末端到达最远端时,q3=0且q5=0,即点位格式为[x,x,0,x,0,x],出现边界奇异。
示意点位1:[0,40,0,0,0,0],如下图所示:
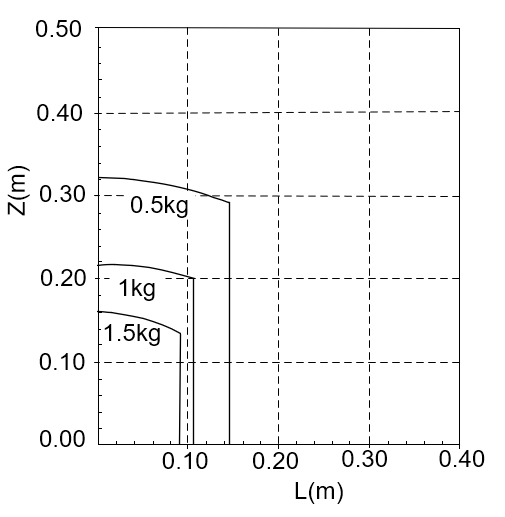
负载曲线图
下图表示 ECO62-B 机械臂末端负载曲线图。其中L是末端负载的质心相对于末端法兰平面的径向距离,Z是相对于末端法兰平面的法向距离。