ROS2:
rm_gazebo功能包说明 rm_gazebo的主要作用是帮助我们实现机械臂Moveit2规划的仿真功能,我们将在Gazebo的仿真环境中搭建一个虚拟机械臂,然后通过Moveit2控制Gazebo中的虚拟机械臂。
这里将从以下两个方面整体介绍该功能包:
- 1.功能包使用:了解该功能包的使用。
- 2.功能包架构说明:熟悉功能包中的文件构成及作用。
代码链接:https://github.com/RealManRobot/ros2_rm_robot/tree/humble/rm_gazebo
1. 控制仿真机械臂
1.1 启动Gazebo虚拟空间和虚拟机械臂
在完成环境安装和功能包安装后,我们可以进行rm_gazebo功能包的运行。
使用如下指令启动Gazebo虚拟空间和虚拟机械臂。
启动标准版本机械臂的命令为:
ros2 launch rm_gazebo gazebo_<arm_type>_demo.launch.py启动六维力版本机械臂的命令为(eco63、gen72、gen72_II不可用):
ros2 launch rm_gazebo gazebo_<arm_type>_6f_demo.launch.py启动一体化六维力版本机械臂的命令为(gen72、gen72_II不可用):
ros2 launch rm_gazebo gazebo_<arm_type>_6fb_demo.launch.py
在实际使用时需要将以上的<arm_type>更换为实际的机械臂型号,可选择的机械臂型号有65、63、63_III、eco65、eco63、75、gen72、gen72_II。
例如65标准版机械臂的启动命令如下:
ros2 launch rm_gazebo gazebo_65_demo.launch.py运行成功后将弹出如下界面。 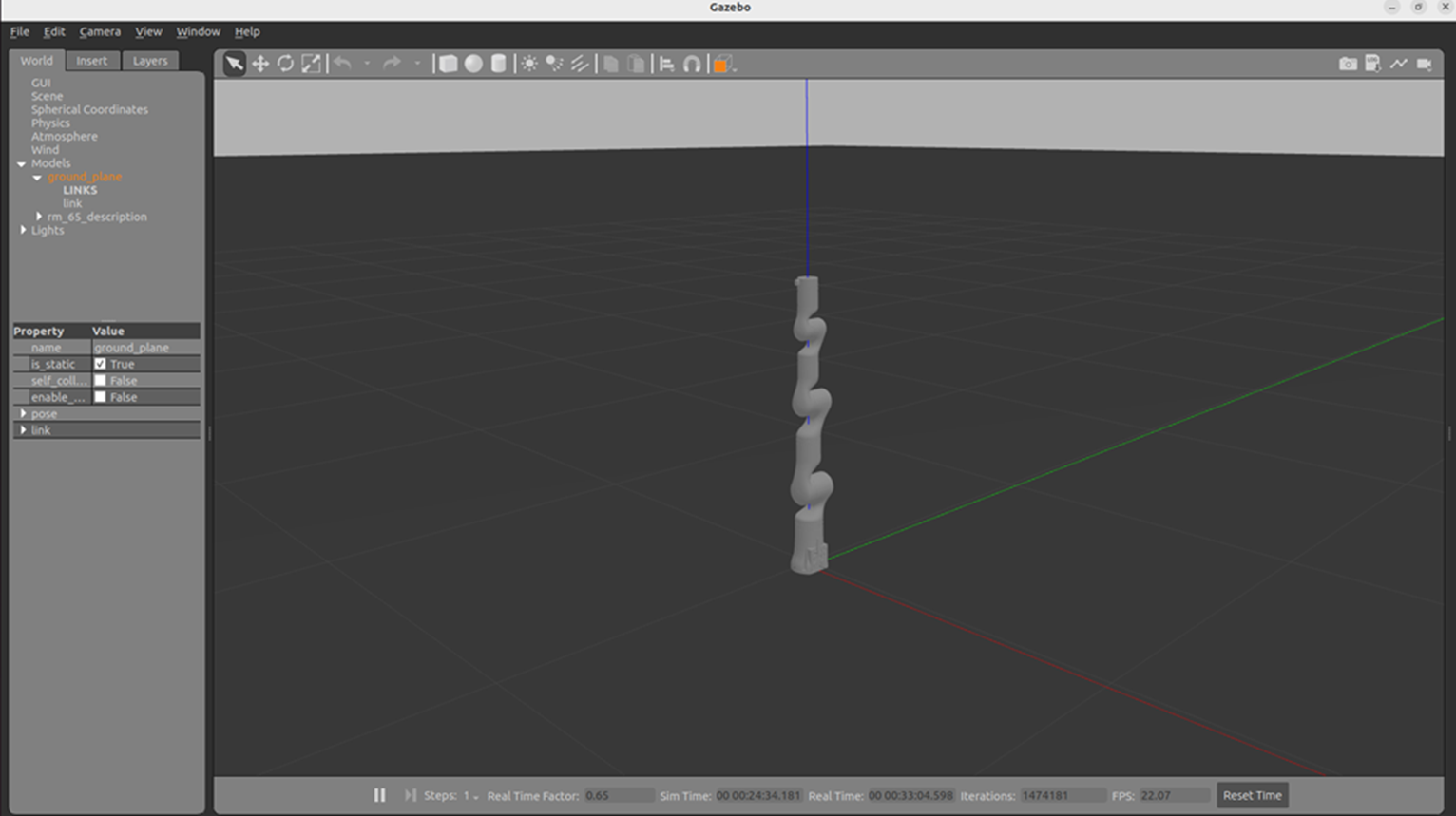
1.2 启动moveit2控制仿真机械臂
之后我们使用如下指令启动moveit2控制gazebo中的仿真机械臂。
启动标准版本机械臂的命令为:
ros2 launch rm_<arm_type>_config gazebo_moveit_demo.launch.py启动六维力版本机械臂的命令为(eco63、gen72、gen72_II不可用):
ros2 launch rm_<arm_type>_config gazebo_moveit_demo_6f.launch.py启动一体化六维力版本机械臂的命令为(gen72、gen72_II不可用):
ros2 launch rm_<arm_type>_config gazebo_moveit_demo_6fb.launch.py
在实际使用时需要将以上的<arm_type>更换为实际的机械臂型号,可选择的机械臂型号有65、63、63_III、eco65、eco63、75、gen72、gen72_II。
例如65标准版机械臂的启动命令如下:
ros2 launch rm_65_config gazebo_moveit_demo.launch.py弹出rviz2的控制界面后就可以进行moveit2和gazebo的仿真控制了。 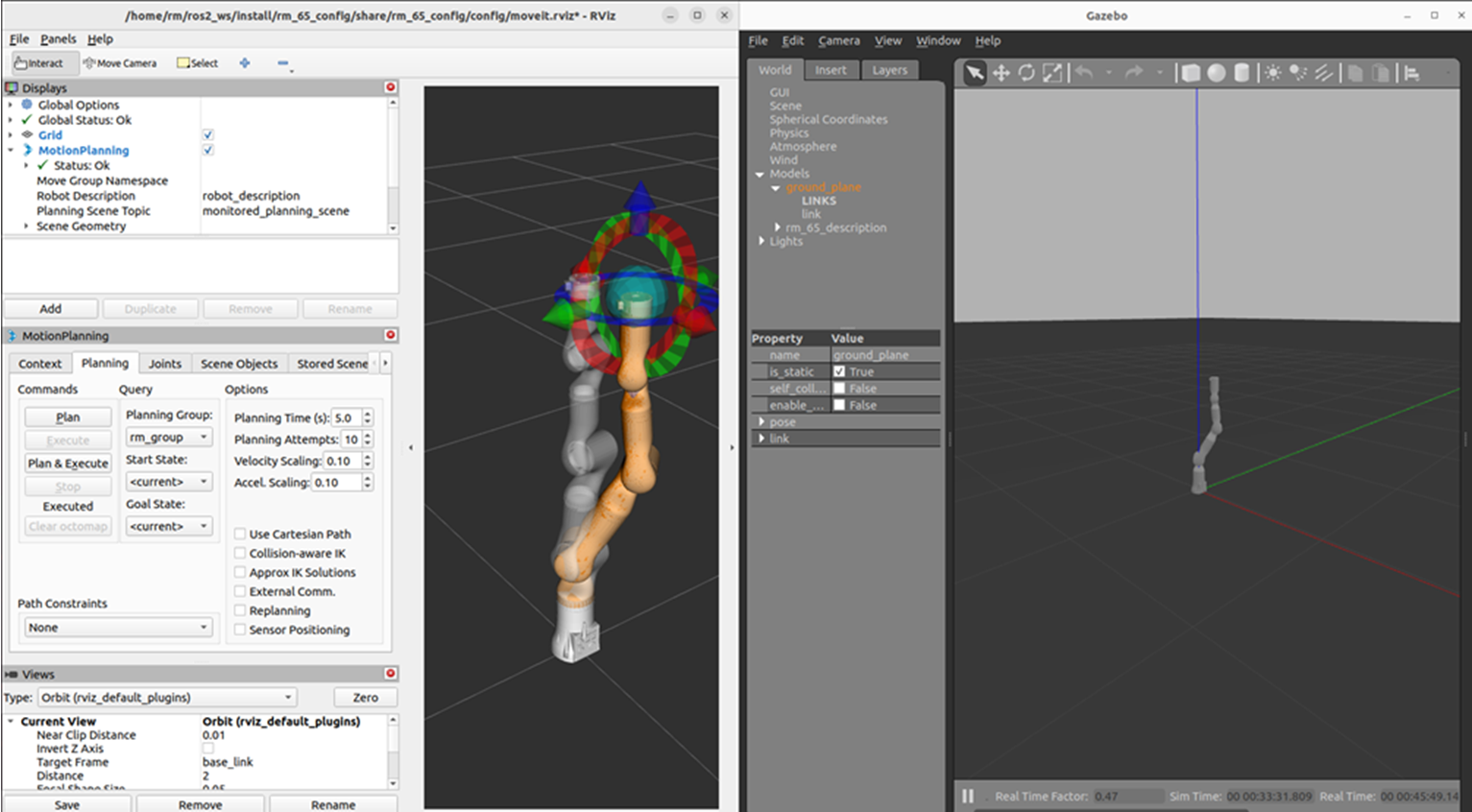
2. rm_gazebo功能包架构文件总览
├── CMakeLists.txt #编译规则文件
├── config
│ ├── gazebo_63_6fb_description.urdf.xacro #RML63一体化六维力gazebo模型描述文件
│ ├── gazebo_63_III_6fb_description.urdf.xacro#RML63_III一体化六维力gazebo模型描述文件
│ ├── gazebo_65_6fb_description.urdf.xacro #RM65一体化六维力gazebo模型描述文件
│ ├── gazebo_75_6fb_description.urdf.xacro #RM75一体化六维力gazebo模型描述文件
│ ├── gazebo_eco63_6fb_description.urdf.xacro #ECO63一体化六维力gazebo模型描述文件
│ ├── gazebo_eco65_6fb_description.urdf.xacro #ECO65一体化六维力gazebo模型描述文件
│ ├── gazebo_63_description.urdf.xacro #RML63gazebo模型描述文件
│ ├── gazebo_65_description.urdf.xacro #RM65gazebo模型描述文件
│ ├── gazebo_75_description.urdf.xacro #RM75gazebo模型描述文件
│ ├── gazebo_eco65_description.urdf.xacro #ECO65gazebo模型描述文件
│ ├── gazebo_eco63_description.urdf.xacro #ECO63gazebo模型描述文件
│ ├── gazebo_gen72_description.urdf.xacro #GEN72gazebo模型描述文件
│ └── gazebo_gen72_II_description.urdf.xacro #GEN72_IIgazebo模型描述文件
├── doc
│ ├── rm_gazebo1.png
│ └── rm_gazebo2.png
├── include
│ └── rm_gazebo
├── launch
│ ├── gazebo_63_6fb_demo.launch.py #RML63一体化六维力gazebo启动文件
│ ├── gazebo_63_6f_demo.launch.py #RML63六维力gazebo启动文件
│ ├── gazebo_63_demo.launch.py #RML63gazebo启动文件
│ ├── gazebo_63_III_6fb_demo.launch.py #RML63_III 一体化六维力gazebo启动文件
│ ├── gazebo_63_III_demo.launch.py #RML63_III gazebo启动文件
│ ├── gazebo_65_6fb_demo.launch.py #RM65一体化六维力gazebo启动文件
│ ├── gazebo_65_6f_demo.launch.py #RM65六维力gazebo启动文件
│ ├── gazebo_65_demo.launch.py #RM65gazebo启动文件
│ ├── gazebo_75_6fb_demo.launch.py #RM75一体化六维力gazebo启动文件
│ ├── gazebo_75_6f_demo.launch.py #RM75六维力gazebo启动文件
│ ├── gazebo_75_demo.launch.py #RM75gazebo启动文件
│ ├── gazebo_eco63_6fb_demo.launch.py #ECO63一体化六维力gazebo启动文件
│ ├── gazebo_eco63_demo.launch.py #ECO63gazebo启动文件
│ ├── gazebo_eco65_6fb_demo.launch.py #ECO65一体化六维力gazebo启动文件
│ ├── gazebo_eco65_6f_demo.launch.py #ECO65六维力gazebo启动文件
│ ├── gazebo_eco65_demo.launch.py #ECO65gazebo启动文件
│ ├── gazebo_gen72_demo.launch.py #GEN72gazebo启动文件
│ └── gazebo_gen72_II_demo.launch.py #GEN72_IIgazebo启动文件
├── package.xml
├── README_CN.md
└── README.md