入门指南:
机械臂扩展 在示教器的扩展界面可对末端工具进行配置和拖动示教的设置如下图所示:
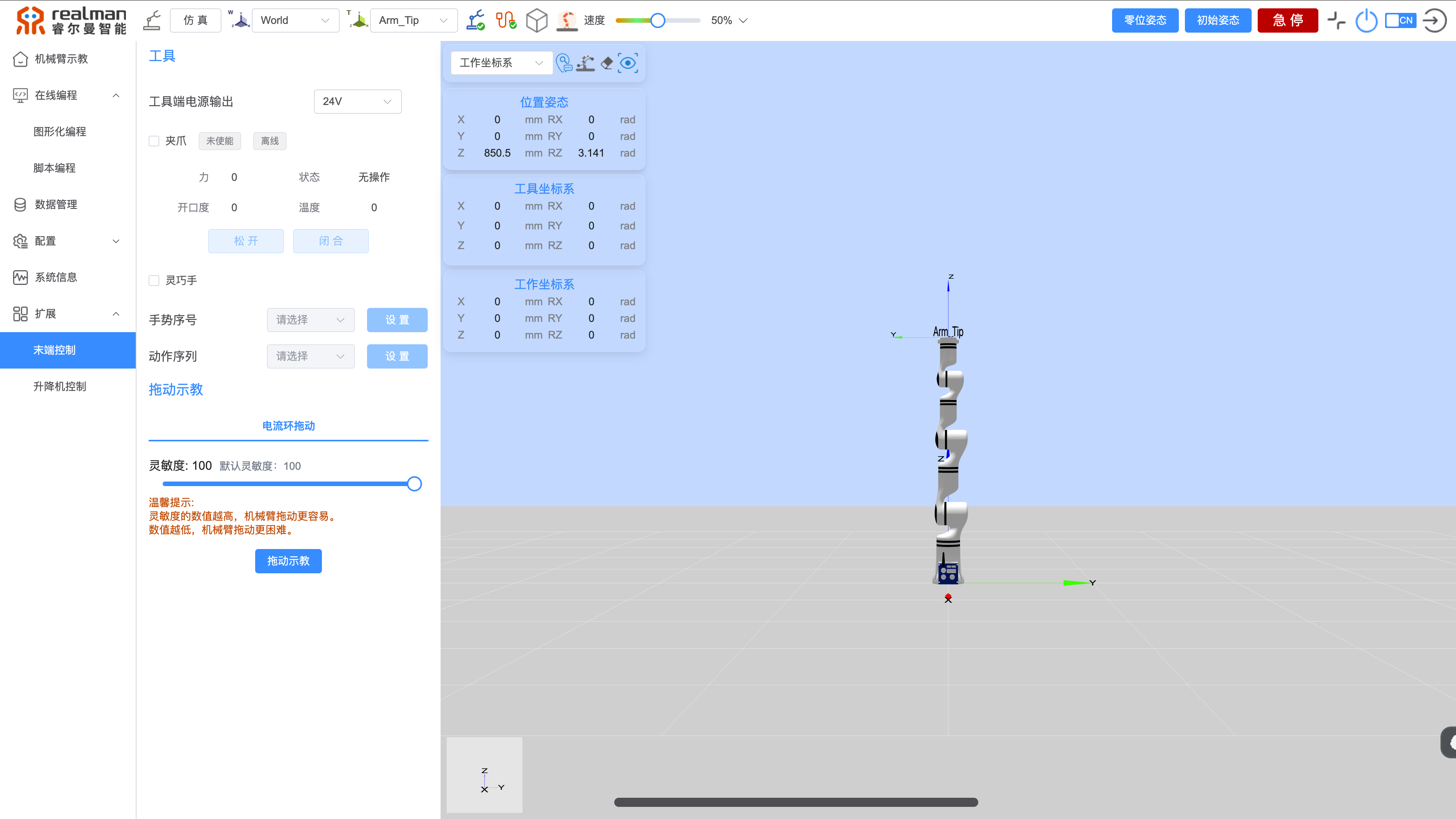
末端控制
末端工具
在示教器的扩展界面可对末端工具进行配置,并可切换工具端对外的输出电压,对末端手爪进行简单的控制,如下图所示:

电源输出:该部分可配置末端接口板对外的输出电源,可配置为0V,12V和24V。
外接设备:目前工具端默认加定制手爪和灵巧手,后续可增加其它设备。夹爪控制,松开和闭合按钮分别控制手爪的张开和闭合;灵巧手控制,可通过设置灵巧手的手势序号和序列序号,来设置手势和动作序列。



升降机控制、拓展关节控制
在示教器的扩展界面可对升降机控制进行参数配置如下图所示。可对当前位置进行上升或下降,也可以设置目标位置后点击“运动”按钮使升降机到达目标高度。

在示教器的扩展界面可对拓展关节进行控制参数配置如下图所示:

在连接拓展关节后会显示当前速度、加速度、电流、最大最小限位、减速比系数。为了防止关节在连接上后有错误,请在连接后先清除关节错误,再点击上使能。拓展关节可向正向运动或者反向运动。可设置目标角度运动,在下方可调节拓展关节运动速度。