本体参数:
GEN72系列参数及D-H模型 基础参数
| 参数名 | 参数值 | |
|---|---|---|
| 基础参数 | 自由度 | 7 |
| 构型 | 仿人构型 | |
| 关节制动器形式 | 1~7关节软抱闸 | |
| 工作半径/mm | 600 | |
| 有效负载/kg | 2 | |
| 自重/kg | 6.6 | |
| 重复定位精度/mm | ±1 | |
| TCP线速度/m/s | ≤1.8 | |
| 典型功率/W | ≤100 | |
| 峰值功率/W | ≤200 | |
| 安装角度 | 任意角度 | |
| 底座尺寸/mm | φ107 | |
| 材质 | 铝合金/ABS | |
| 环境适应性 | 工作温度/℃ | 0-45 |
| 工作湿度 | 25~85%无结露 | |
| 防护等级 | 本体IP54 | |
| 运动角度范围/° | J1 | -172~+172 |
| J2 | -105~+105 | |
| J3 | -172~+172 | |
| J4 | -165~+55 | |
| J5 | -172~+172 | |
| J6 | -90~+120 | |
| J7 | -172~+172 | |
| 最大角速度/ °/s | J1 | 180 |
| J2 | 180 | |
| J3 | 180 | |
| J4 | 180 | |
| J5 | 225 | |
| J6 | 225 | |
| J7 | 225 | |
本体参数
MDH模型坐标系:

GEN72系列MDH参数(改进D-H参数):
| 关节编号(i) | offset(°) | |||
|---|---|---|---|---|
| 1 | 0 | 0 | 218 | 0 |
| 2 | 0 | -90 | 0 | 0 |
| 3 | 0 | 90 | 280 | 0 |
| 4 | 40 | 90 | 0 | 0 |
| 5 | -19 | -90 | 252.5 | 0 |
| 6 | 0 | 90 | 0 | 90 |
| 7 | 67 | 90 | 90.5 | 0 |
说明: offset为机械零位与建模零位的偏差, 即模型角度 = 关节角度 + offset.
GEN72系列连杆动力学参数
| joint_id(i) | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| 0.849 | 0.954 | 1.166 | 0.501 | 0.164 | 0.92 | 0 | |
| 0.018 | 0 | 32.035 | -0.101 | -0.012 | 33.677 | 0 | |
| 0.485 | -113.065 | 1.405 | 121.531 | -0.835 | -24.499 | 0 | |
| -5.062 | 1.39 | -10.865 | -0.415 | -49.324 | -0.234 | 0 | |
| 619.491 | 15830.405 | 1884.802 | 7780.748 | 687.831 | 1468.45 | 0 | |
| -0.64 | -0.498 | -67.215 | 3.144 | 0.372 | 1506.848 | 0 | |
| -0.349 | -0.274 | -13.467 | 0.053 | -0.062 | 14.523 | 0 | |
| 758.741 | 831.213 | 3392.831 | 208.799 | 647.655 | 2422.923 | 0 | |
| -0.727 | -2.038 | -1.356 | 24.787 | 2.089 | -10.309 | 0 | |
| 454.962 | 15738.682 | 2238.137 | 7777.93 | 119.871 | 3549.823 | 0 | |
| 备注 |
说明:
为连杆质量, 单位为 为连杆质心x坐标, 单位为 为连杆质心y坐标, 单位为 为连杆质心z坐标, 单位为 , , , , , 为连杆坐标系下描述的主惯量, 单位为
备注:
- 以上数据来源为CAD设计值
- 如需质心坐标系下的惯性参数, 使用平行移轴定理即可, 计算方法如下所述.
假设有一输出坐标系为坐标系
式中:
关节分布和尺寸说明
GEN72机器人共有7 个旋转关节,每个关节表示 1 个自由度。如下图所示,机器人关节包括肩部(关节 1),肩部(关节 2),肩部(关节 3),肘部(关节 4),腕部(关节5),腕部(关节 6)和腕部(关节 7)。
工作空间
GEN72-B运动范围,除去基座正上方和正下方的圆柱空间,工作范围为半径 600mm 的球体。选择机器人安装位置时,务必考虑机器人正上方和正下方的圆柱体空间,尽可能避免将工具移向圆柱体空间。另外,在实际应用中,关节 1 转动范围:±172°,关节 2 转动范围:±105°,关节 3 转动范围:± 172°,关节 4 转动范围:-170°~55°,关节 5 转动范围:±172°,关节 6 转动范围:-90°~120°,关节 7 转动范围:±172°。
从工作空间截面上看,7 轴机器人可操作度较好的区域如下图黄色框线示意,在工作空间中整体呈现一个环状区域。
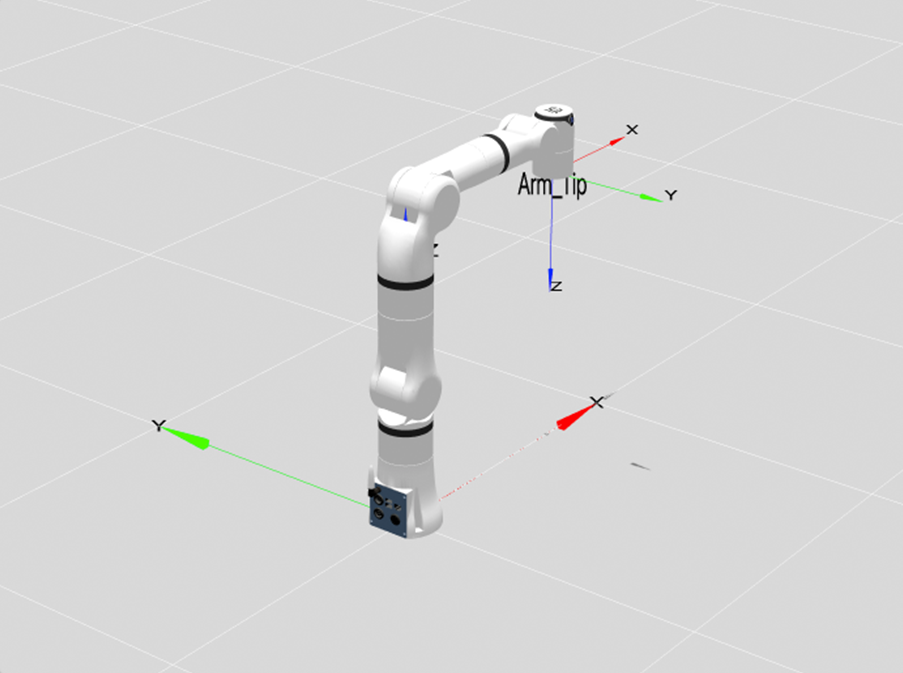
运动奇异点
肩部奇异
关节1与关节3轴线共线,即q2=0,示意点位[0,0,0,-90,0,0,0],如下图所示:
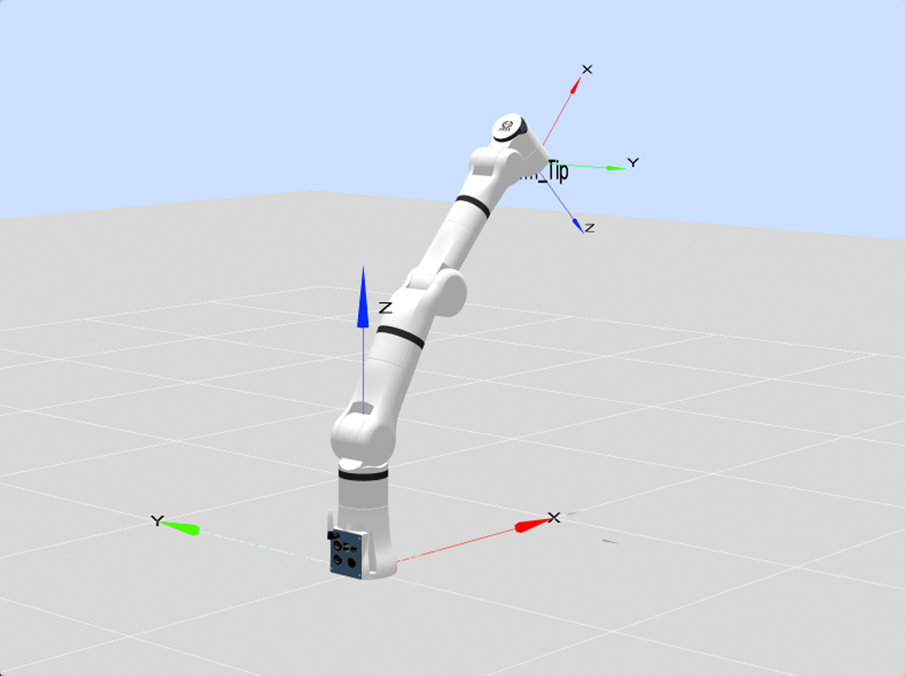
肘部奇异
关节2、关节4及关节6的坐标原点共线,即q4=-12.4333582177677613,点位格式为[x,x,x,-12.43,x,x,x],示意点位[0,30,0,-12.433,0,0,0],如下图所示:
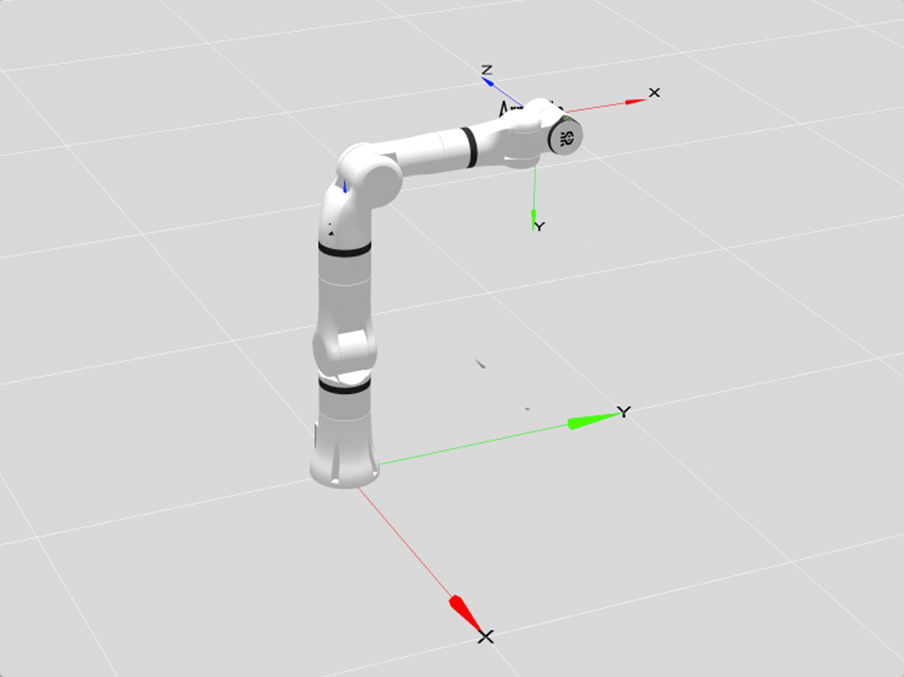
其他奇异
关节2为0,关节3为±90度,关节5为±90度,肩部奇异的一种。点位情况为s(q2)=0 ∧ c(q3)=0 ∧ c(q5)=0,示意点位[0,0,90,-90,90,0,0],如下图所示:
负载曲线图
表示GEN72机械臂末端负载曲线图。其中L是末端负载的质心相对于末端法兰平面的径向距离,Z是相对于末端法兰平面的法向距离。