入门指南:
硬件接口详细说明 机械臂系统组成
睿尔曼协作机器人系统主要由机器人本体、控制器(集成于本体基座内)和平板示教器(选配)组成。
控制器

| 序号 | 接口 | 功能 |
|---|---|---|
| 1 | 电源开关 | 控制机器人电源,开启后亮起蓝灯 |
| 2 | 电源插头 | 插入电源线缆 |
| 3 | 扩展插头 | 引出控制器RS485、I/O等接口 |
| 4 | WIFI/蓝牙天线 | 无线通讯使用 |
| 5 | USB接口1 | 扩展接口,可外接手柄接收器 |
| 6 | USB接口2 | 作为虚拟网口使用 |
| 7 | 网口 | 通讯网口 |
| 8 | 状态提示灯 | 根据机械臂不同状态分别显示蓝色、白色、绿色、黄色、红色。 ①为控制器启动初始化; ②白色为各关节启动初始化; ③为机械臂正常运行; ④为机械臂发出警告信息,为普通故障,需立即处理; ⑤为机械臂发生严重故障,需立即处理。 |
在机器人控制器面板上有一个16芯的连接器,机器人所有的I/O即从该连接器引出,目前线缆分为初代线缆和二代线缆,如下图所示。
注意
在进行线路连接时,禁止带电插拔航插插头。插入航插时请用户务必保证插针与孔位对齐,并检查插针是否正常。
 |  |
|---|---|
| 初代线缆 | 二代线缆 |
16芯连接器的结构示意图如下。
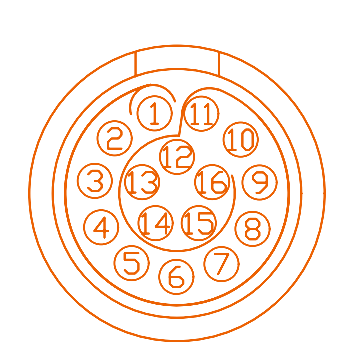
初代线缆和二代线缆的线缆定义,如下表所示。
| 序号 | 初代线缆线序 | 二代线缆线序 | 定义 | 说明 | 线号(仅二代线缆) | 备注 |
|---|---|---|---|---|---|---|
| 1 | 粉色加棕色 | 黑条棕/棕色 | VOUT | 对外输出正 | 线号1 | 12V/24V |
| 2 | 灰色加紫色 | 灰色/紫色 | P_IO_GND | 对外输出负 | 线号2 | |
| 3 | 黄色 | 黄色 | 485A | 线号3 | ||
| 4 | 黄绿色 | 黑条黄 | 485B | 线号4 | ||
| 5 | 紫白 | 黑条白 | IO1 | 可复用IO | 线号5 | |
| 6 | 红白 | 白条红 | IO2 | 可复用IO | 线号6 | |
| 7 | 绿白 | 黑条绿 | IO3 | 可复用IO | 线号7 | |
| 8 | 黄白 | 白条黑 | IO4 | 可复用IO | 线号8 | |
| 9 | 蓝白 | 黑条橙 | OUT_P_IN | 外部输入数字电源 | 线号9 | 0~24V |
| 10 | 浅蓝 | 黑条蓝 | OUT_P_OUT | 外部输出数字电源 | 线号10 | 0~24V |
| 11 | 深蓝 | 蓝色 | OUT_P_GND | 外部数字地 | 线号11 | |
| 12 | 绿 | 绿色 | FDCAN_A | CAN_H | 线号12 | |
| 13 | 红 | 红色 | FDCAN_B | CAN_L | 线号13 | |
| 14 | 白 | 白色 | 空 | 预留 | 线号14 | |
| 15 | 黑 | 黑色 | 空 | 预留 | 线号15 | |
| 16 | 橙 | 橙色 | 空 | 预留 | 线号16 |
注意
数字量输入输出的电压值由接入的参考电压决定,机械臂16芯扩展接口线缆仅提供了12V和24V电源电压。数字量输入输出若需要输出其他电压值,则需要从外部对OUT_P_OUT+、OUT_P_IN+和OUT_P_GND引脚引入参考电压。
电源输出
机器人16芯线可对外输出12V/24V电源(当输出24V电压时,实际输出电压与机器人电源电压一致,若电源电压不稳定,输出电压会受到影响),电源输出类型可通过示教器或者JSON协议进行配置和控制通断,电气特性如下表所示。
| 参数 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|
| 电源电压 | 0 | —— | 24 | V |
| 电源电流 | —— | 1000 | 1500 | mA |
注意
在通过控制器电源为外部设备进行供电时,参考上表电流参数限制,以防过载,烧毁控制器。
数字输入
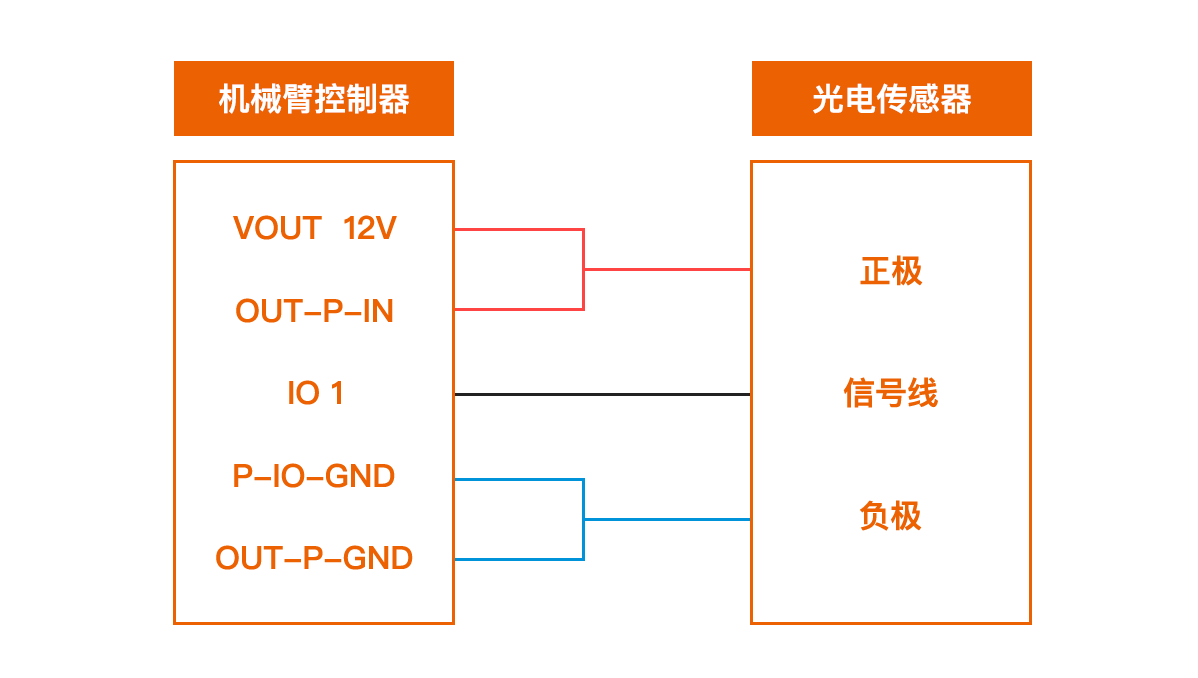
控制器接口共有4路数字输入,用户使用时需要分别接通外部输入数字电源通道(OUT_P_IN+)和外部数字地通道(OUT_P_GND),为数字输入提供电平参考。电气特性如下表所示:
| 数字输入 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|
| 输入电源Vin | 0 | — | 24 | V |
| 输入电压 | -0.5 | 24 | V | |
| 逻辑低电平 | 1 | V | ||
| 逻辑高电平 | Vin-0.5 | V |
以NPN型光电传感器接线为例,机械臂输入参考电平采用16芯航插线上的12V电源,其接线方式如下图所示:
数字输出
控制器接口共有4路数字输出,用户使用时需要分别接通外部输出数字电源通道(OUT_P_OUT+)和外部数字地通道(OUT_P_GND),为数字输出提供电平参考。电气特性如下表所示:
| 数字输出 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|
| 输入电源Vin | 0 | — | 24 | V |
| 输出电流 | — | — | 2 | mA |
机械臂数字输出信号与外部设备连接时,可采用外部设备电源作为机械臂输出端的参考电平,但参考电压最大不能高于24V。接线方式如下图所示:
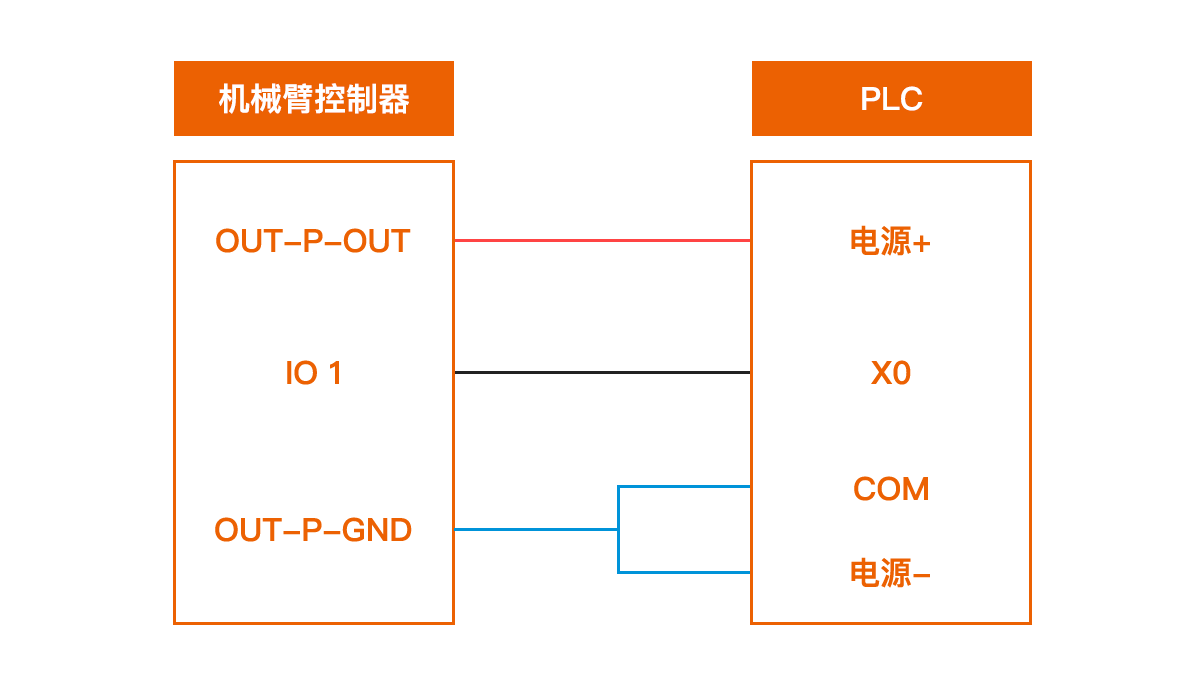
注意:数字输出信号最大输出电流为2mA,可以选择加装场效应模块放大电流。
IO复用功能
16芯线中的IO具备复用功能,可以通过程序指令或者web端示教器切换为:
| 输入(NPN型) |
|---|
| 输出(最大电流2mA) |
| 输入开始功能复用模式 |
| 输入暂停功能复用模式 |
| 输入继续功能复用模式 |
| 输入急停功能复用模式 |
| 输入进入电流环拖动模式 |
| 输入进入力只动位置拖动模式(六维力版本可配置) |
| 输入进入力只动姿态拖动模式(六维力版本可配置) |
| 输入进入力位姿结合拖动复用模式(六维力版本可配置) |
| 输入外部轴最大软限位复用模式(外部轴模式可配置) |
| 输入外部轴最小软限位复用模式(外部轴模式可配置) |
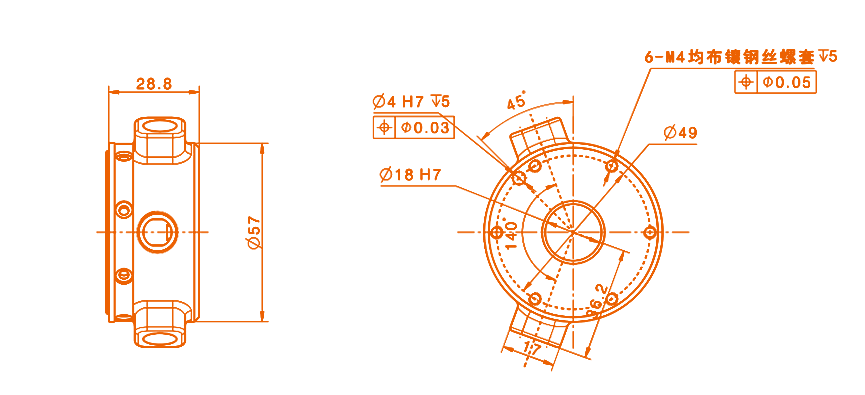
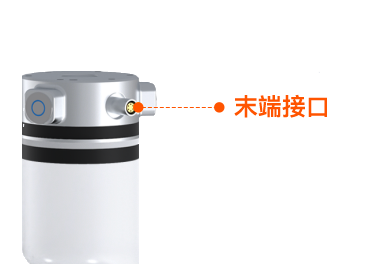
末端拓展
为方便用户在机器人末端添加工具,预留了安装法兰和通信末端接口,在法兰外壳上有两个按钮,分别控制机器人进行拖动示教和轨迹复现。下面是末端的尺寸和法兰安装说明:
通信末端接口是一个6芯的连接器,它为连接到机器人的不同夹持器和传感器提供电源和控制信号。
注意
在插拔末端接口板的航插线缆时,请确保末端的电源输出处于关闭状态,否则有造成硬件损坏的风险!插入航插时请用户务必保证插针与孔位对齐,并检查插针是否正常。
接口板的功能接口如下表5所示:
| 序号 | 接口类型 | 数量 | 功能 |
|---|---|---|---|
| 1 | 电源输出 | 1路 | 可配置为12V/24V,可控制通断 |
| 2 | 数字输出 | 最大支持2路 | 参考电平与电源输出一致,仅支持12V/24V |
| 3 | 数字输入 | 最大支持2路 | 参考电平与电源输出一致,仅支持12V/24V |
| 4 | RS485 | 1路 | 与RS485接口外设通信 |
| 5 | 拖动示教按钮(绿色) | 1路 | 长按,机器人开始进入拖动示教模式 |
| 6 | 轨迹复现按钮(蓝色) | 1路 | 短按,机器人复现拖动示教轨迹 |
末端工具接口通过1个6芯航插对外连接,航插引脚及定义如下所示。
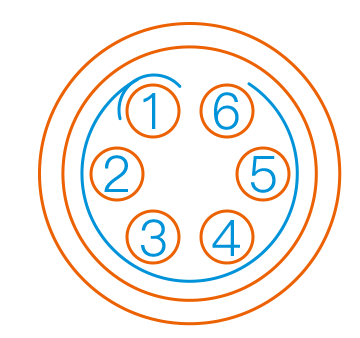
| 针脚编号 | 接线颜色 | 功能 |
|---|---|---|
| 1 | 黄 | RS485_A |
| 2 | 白 | RS485_B |
| 3 | 红 | 数字接口1(DI1/DO1) |
| 4 | 黑 | 数字接口2(DI2/DO2) |
| 5 | 绿 | 电源GND |
| 6 | 蓝 | 电源输出: 0V/12V/24V,可进行程序控制 |
备注
上表中的复用功能通过程序指令进行切换。出厂时默认引脚3和引脚4为数字输入通道(DI1和DI2),引脚6的电源输出为0V(可通过程序设置)。
注:电源输出设置为 5V 时,工具端的IO 暂不支持输入输出功能。
数字I/O输入
工具数字输入通道共2路,电气特性如下表所示。
| 数字输入 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|
| 输入电源Vin | 0 | —— | 24 | V |
| 输入电压 | -0.5 | 24 | V | |
| 逻辑低电平 | 1 | V | ||
| 逻辑高电平 | Vin-0.5 | V |
数字I/O输出
工具端数字输出通道共2路,可通过示教器或者JSON协议直接通过控制器进行配置,电气特性如下表所示。
| 数字输出 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|
| 输入电源Vin | 0 | —— | 24 | V |
电源输出
机器人末端可对外输出12V/24V电源(当输出24V电压时,实际输出电压与机器人电源电压一致,若电源电压不稳定,输出电压会受到影响),电源输出类型可通过示教器或者JSON协议进行配置和控制通断,电气特性如下表所示。
| 参数 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|
| 电源电压 | 0 | —— | 24 | V |
| 电源电流 | —— | 1000 | 1500 | mA |
注意
在通过末端电源为末端工具进行供电时,参考上表电流参数限制,以防过载,烧毁末端接口板。
通讯接口
机器人在控制器的16芯航插和末端接口板6芯航插处,各有1路RS485通讯接口(仅用于机器人控制外部设备,不支持外部设备进行机器人运动控制),这两个RS485端口可通过JSON协议配置为标准的Modbus RTU模式(为保证RS485通讯稳定,尽可能将设备与机械臂的GND连接)。然后通过 JSON 协议对端口连接的外设进行读写操作。