Demo演示(python):
样条曲线运动示例 1. 项目介绍
本项目是一个使用睿尔曼Python开发包完成工程完成机械臂连接、机械臂版本获取、API版本获取、moveS运动关闭连接。
2. 代码结构
RMDemo_Moves/
│
├── README.md <- 项目的核心文档
├── requirements.txt <- 项目的依赖列表
├── setup.py <- 项目的安装脚本
│
├── src/ <- 项目的源代码
│ ├── main.py <- 程序的主入口
│ └── core/ <- 核心功能或业务逻辑代码
│ └── demo_moves.py <- 完成机械臂连接、机械臂版本获取、API版本获取、movej运动、moveL运动、moveC运动、关闭连接的示例。
└── Robotic_Arm/ <- 睿尔曼机械臂二次开发包3.项目下载
通过链接下载 RM_API2 到本地:开发包下载,进入RM_API2\Demo\RMDemo_Python目录,可找到RMDemo_Moves。
4. 环境配置
在Windows和Linux环境下运行时需要的环境和依赖项:
| 项目 | Linux | Windows |
|---|---|---|
| 系统架构 | x86架构 | - |
| python | 3.9以上 | 3.9以上 |
| 特定依赖 | - | - |
Linux环境配置
参考python官网-linux下载安装python3.9。
进入项目目录后打开终端运行以下指令安装依赖:
bash
pip install -r requirements.txtWindows环境配置
参考python官网-Windows下载安装python3.9。
进入项目目录后打开终端运行以下指令安装依赖:
bash
pip install -r requirements.txt5. 注意事项
- 该Demo以RM65-B型号机械臂为例,请根据实际情况修改代码中的数据。
- moves样条曲线运动,其中的轨迹连接标志最后一个为0,前面的均为1,如果都为0则为movel直线运动。
6. 使用指南
1. 快速运行
按照以下步骤快速运行代码:
配置机械臂IP地址:打开
demo_moves.py文件,在main函数中修改RobotArmController类的初始化参数为当前机械臂的IP地址,默认IP地址为"192.168.1.18"。python# Create a robot arm controller instance and connect to the robot arm robot_controller = RobotArmController("192.168.1.18", 8080, 3)命令行运行:在终端进入
RMDemo_Moves目录,输入以下命令运行Python脚本:bashpython ./src/main.py运行结果:在终端中可以看到机械臂的运动轨迹,并输出相应的日志信息。
运行脚本后,输出结果如下所示:
current api version: 0.2.9
Successfully connected to the robot arm: 1
API Version: 0.2.9
movej motion succeeded
movej_p motion succeeded
moves operation succeeded
Successfully disconnected from the robot arm2. 代码说明
下面是 demo_moves.py 文件的主要功能:
定义各型号机械臂参数字典
pythonarm_models_to_points = { "RM_65": [ [0, 0, 0, 0, 0, 0], [-0.3, 0, 0.3, 3.14, 0, 0], [ [-0.3, 0, 0.3, 3.14, 0, 0], [-0.27, -0.22, 0.3, 3.14, 0, 0], [-0.314, -0.25, 0.2, 3.14, 0, 0], [-0.239, 0.166, 0.276, 3.14, 0, 0], [-0.239, 0.264, 0.126, 3.14, 0, 0] ] ], "RM_75": [ [0, 20, 0, 70, 0, 90, 0], [0.297557, 0, 0.337061, 3.142, 0, 3.142], [ [0.3, 0.1, 0.337061, 3.142, 0, 3.142], [0.2, 0.3, 0.237061, 3.142, 0, 3.142], [0.2, 0.25, 0.037061, 3.142, 0, 3.142], [0.1, 0.3, 0.137061, 3.142, 0, 3.142], [0.2, 0.25, 0.337061, 3.142, 0, 3.142] ] ], "RML_63": [ [0, 20, 70, 0, 90, 0], [0.448968, 0, 0.345083, 3.142, 0, 3.142], [ [0.3, 0.3, 0.345083, 3.142, 0, 3.142], [0.3, 0.4, 0.145083, 3.142, 0, 3.142], [0.3, 0.2, 0.045083, 3.142, 0, 3.142], [0.4, 0.1, 0.145083, 3.142, 0, 3.142], [0.5, 0, 0.345083, 3.142, 0, 3.142] ] ], "ECO_65": [ [0, 20, 70, 0, -90, 0], [0.352925, -0.058880, 0.327320, 3.141, 0, -1.57], [ [0.3, 0.3, 0.327320, 3.141, 0, -1.57], [0.2, 0.4, 0.127320, 3.141, 0, -1.57], [0.2, 0.2, 0.027320, 3.141, 0, -1.57], [0.3, 0.1, 0.227320, 3.141, 0, -1.57], [0.4, 0, 0.327320, 3.141, 0, -1.57] ] ], "GEN_72": [ [0, 0, 0, -90, 0, 0, 0], [0.359500, 0, 0.426500, 3.142, 0, 0], [ [0.359500, 0, 0.426500, 3.142, 0, 0], [0.2, 0.3, 0.426500, 3.142, 0, 0], [0.2, 0.3, 0.3, 3.142, 0, 0], [0.3, 0.3, 0.3, 3.142, 0, 0], [0.3, -0.1, 0.4, 3.142, 0, 0] ] ], "ECO_63": [ [0, 20, 70, 0, -90, 0], [0.544228, -0.058900, 0.468274, 3.142, 0, -1.571], [ [0.3, 0.3, 0.468274, 3.142, 0, -1.571], [0.3, 0.4, 0.168274, 3.142, 0, -1.571], [0.3, 0.2, 0.268274, 3.142, 0, -1.571], [0.4, 0.1, 0.368274, 3.142, 0, -1.571], [0.5, 0, 0.468274, 3.142, 0, -1.571] ] ], }连接机械臂
pythonrobot_controller = RobotArmController("192.168.1.18", 8080, 3)连接到指定IP和端口的机械臂。
获取API版本
pythonprint("\nAPI Version: ", rm_api_version(), "\n")获取并显示API版本。
执行movej运动
pythonrobot_controller.movej(points[0])执行movej_p运动
pythonrobot_controller.movej_p(points[1])执行moves运动
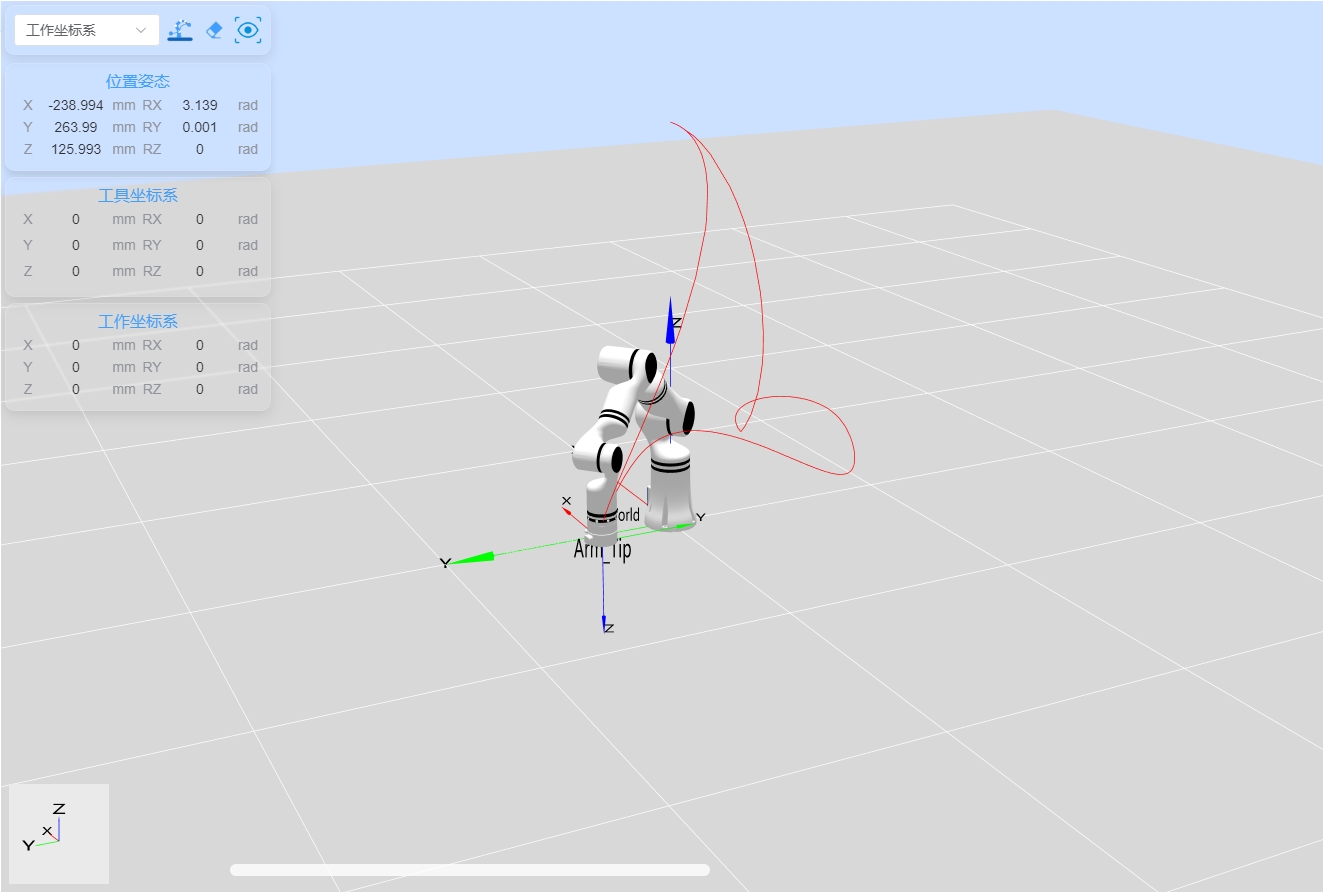
pythonrobot_controller.moves(points[2])执行moves运动,沿多点轨迹进行样条曲线移动。 轨迹如下图所示:
断开机械臂连接
pythonrobot_controller.disconnect()
7. 许可证信息
- 本项目遵循MIT许可证。