Python:
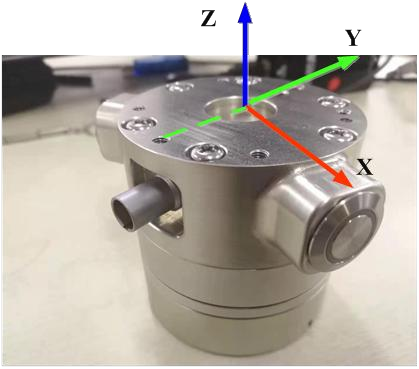
末端六维力配置Force 睿尔曼机械臂六维力版末端配备集成式六维力传感器,无需外部走线,用户可直接通过协议对六维力进行操作, 获取六维力数据。如下图所示,正上方为六维力的 Z 轴,航插反方向为六维力的 Y 轴,坐标系符合右手定则。 机械臂位于零位姿态时,工具坐标系与六维力的坐标系方向一致。
另外,六维力额定力 200N,额定力矩 7Nm,过载水平 300FS,工作温度 5~80℃,准度 0.5FS。使用过程中 注意使用要求,防止损坏六维力传感器。下面是六维力坐标系:
本接口可用于查询、配置末端力传感器等,下面是末端力传感器Force的详细成员函数说明,包含了方法原型、参数说明、返回值说明和使用示例。
查询六维力传感器力信息rm_get_force_data()
查询当前六维力传感器得到的力和力矩信息,包含Fx,Fy,Fz,Mx,My,Mz。
- 方法原型:
python
rm_get_force_data(self) -> tuple[int, dict[str, any]]:- 返回值:
tuple[int, dict[str,any]]: 包含两个元素的元组。
- int: 函数执行的状态码
| 参数 | 类型 | 说明 |
|---|---|---|
| 0 | int | 成功 |
| 1 | int | 控制器返回false,参数错误或机械臂状态发生错误。 |
| -1 | int | 数据发送失败,通信过程中出现问题。 |
| -2 | int | 数据接收失败,通信过程中出现问题或者控制器长久没有返回。 |
| -3 | int | 返回值解析失败,接收到的数据格式不正确或不完整。 |
- 六维力数据字典
| 参数 | 类型 | 说明 |
|---|---|---|
rm_force_data_t | dict[str, any] | 六维力数据字典,键为rm_force_data_t结构体的字段名称 |
- 使用示例
python
from Robotic_Arm.rm_robot_interface import *
# 实例化RoboticArm类
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# 创建机械臂连接,打印连接id
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
print(arm.rm_get_force_data())
arm.rm_delete_robot_arm()标定当前状态下的零位rm_clear_force_data()
将六维力数据清零,标定当前状态下的零位。
- 方法原型:
python
rm_clear_force_data(self) -> int:- 返回值: 函数执行的状态码:
| 参数 | 类型 | 说明 |
|---|---|---|
| 0 | int | 成功 |
| 1 | int | 控制器返回false,参数错误或机械臂状态发生错误。 |
| -1 | int | 数据发送失败,通信过程中出现问题。 |
| -2 | int | 数据接收失败,通信过程中出现问题或者控制器长久没有返回。 |
| -3 | int | 返回值解析失败,接收到的数据格式不正确或不完整。 |
- 使用示例
python
from Robotic_Arm.rm_robot_interface import *
# 实例化RoboticArm类
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# 创建机械臂连接,打印连接id
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
print(arm.rm_clear_force_data())
arm.rm_delete_robot_arm()自动设置六维力重心参数rm_set_force_sensor()
设置六维力重心参数,六维力重新安装后,必须重新计算六维力所受到的初始力和重心。分别在不同姿态下,获取六维力的数据, 用于计算重心位置。该指令下发后,机械臂以固定的速度运动到各标定点。 以RM65机械臂为例,四个标定点的关节角度分别为: 位置1关节角度:{0,0,-60,0,60,0} 位置2关节角度:{0,0,-60,0,-30,0} 位置3关节角度:{0,0,-60,0,-30,180} 位置4关节角度:{0,0,-60,0,-120,0}
- 方法原型:
python
rm_set_force_sensor(self, block: bool) -> int:- 参数说明:
| 名称 | 类型 | 说明 |
|---|---|---|
block | bool | true 表示阻塞模式,等待标定完成后返回;false 表示非阻塞模式,发送后立即返回 |
- 返回值: 函数执行的状态码:
| 参数 | 类型 | 说明 |
|---|---|---|
| 0 | int | 成功 |
| 1 | int | 控制器返回false,参数错误或机械臂状态发生错误。 |
| -1 | int | 数据发送失败,通信过程中出现问题。 |
| -2 | int | 数据接收失败,通信过程中出现问题或者控制器长久没有返回。 |
| -3 | int | 返回值解析失败,接收到的数据格式不正确或不完整。 |
- 使用示例
python
from Robotic_Arm.rm_robot_interface import *
# 实例化RoboticArm类
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# 创建机械臂连接,打印连接id
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
print(arm.rm_set_force_sensor(True))
arm.rm_delete_robot_arm()手动标定六维力数据rm_manual_set_force()
六维力重新安装后,必须重新计算六维力所受到的初始力和重心。该手动标定流程,适用于空间狭窄工作区域,以防自动标定过程中 机械臂发生碰撞,用户可以手动选取四个位置下发,当下发完四个点后,机械臂开始自动沿用户设置的目标运动,并在此过程中计算六维力重心。
注意: 上述4个位置必须按照顺序依次下发,当下发完位置4后,机械臂开始自动运行计算重心。
- 方法原型:
python
rm_manual_set_force(self, point_num: int, joint: list[float], block: bool) -> int:- 参数说明:
| 名称 | 类型 | 说明 |
|---|---|---|
point_num | int | 点位;1~4 |
joint | list[float] | 关节角度,单位:°度 |
block | bool | true 表示阻塞模式,等待标定完成后返回;false 表示非阻塞模式,发送后立即返回 |
- 返回值: 函数执行的状态码:
| 参数 | 类型 | 说明 |
|---|---|---|
| 0 | int | 成功 |
| 1 | int | 控制器返回false,参数错误或机械臂状态发生错误。 |
| -1 | int | 数据发送失败,通信过程中出现问题。 |
| -2 | int | 数据接收失败,通信过程中出现问题或者控制器长久没有返回。 |
| -3 | int | 返回值解析失败,接收到的数据格式不正确或不完整。 |
- 使用示例
python
from Robotic_Arm.rm_robot_interface import *
import time
# 实例化RoboticArm类
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# 创建机械臂连接,打印连接id
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
set_force_data = [({'point_num': 1, 'joint': [0, 0, -60, 0, 60, 0], 'block': True},
{'point_num': 2, 'joint': [0, 0, -60, 0, -30, 0], 'block': True},
{'point_num': 3, 'joint': [0, 0, -60, 0, -30, 180], 'block': True},
{'point_num': 4, 'joint': [0, 0, -60, 0, -120, 0], 'block': True})]
print(arm.rm_manual_set_force(**set_force_data[0]))
time.sleep(1)
print(arm.rm_manual_set_force(**set_force_data[1]))
time.sleep(1)
print(arm.rm_manual_set_force(**set_force_data[2]))
time.sleep(1)
print(arm.rm_manual_set_force(**set_force_data[3]))
time.sleep(1)
arm.rm_delete_robot_arm()停止标定力传感器重心rm_stop_set_force_sensor()
- 方法原型:
python
rm_stop_set_force_sensor(self) -> int:- 返回值: 函数执行的状态码:
| 参数 | 类型 | 说明 |
|---|---|---|
| 0 | int | 成功 |
| 1 | int | 控制器返回false,参数错误或机械臂状态发生错误。 |
| -1 | int | 数据发送失败,通信过程中出现问题。 |
| -2 | int | 数据接收失败,通信过程中出现问题或者控制器长久没有返回。 |
| -3 | int | 返回值解析失败,接收到的数据格式不正确或不完整。 |
- 使用示例
python
from Robotic_Arm.rm_robot_interface import *
# 实例化RoboticArm类
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# 创建机械臂连接,打印连接id
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
print(arm.rm_stop_set_force_sensor())
arm.rm_delete_robot_arm()