JSON协议:
末端工具指令集(选配) 夹爪控制
睿尔曼机械臂末端配备了因时的EG2-4C2夹爪,为了便于用户操作夹爪,机械臂控制器对用户开放了夹爪的控制协议(夹爪控制协议与末端modbus功能互斥)。
设置夹爪行程set_gripper_route
设置夹爪行程,即夹爪开口的最大值和最小值,设置成功后会自动保存,夹爪断电不丢失。
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
set_gripper_route | string | 设置夹爪行程。 |
min | int | 夹爪开口最小值,范围:0~1000,无单位量纲。 |
max | int | 夹爪开口最大值,范围:0~1000,无单位量纲。 |
- 代码示例
输入
设置夹爪行程,即夹爪开口的最大值和最小值
设置成功后会自动保存,夹爪断电不丢失
{"command":"set_gripper_route","min":70,"max":500}输出
配置成功:
{
"command": "set_gripper_route",
"state": true
}配置失败:
{
"command": "set_gripper_route",
"state": false
}松开夹爪set_gripper_release
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
set_gripper_release | string | 设置夹爪松开。 |
speed | int | 夹爪松开速度,范围1~1000,无单位量纲。 |
block | int | true 表示阻塞模式,false 表示非阻塞模式。 |
- 代码示例
输入
设置夹爪行程,即夹爪开口的最大值和最小值
设置成功后会自动保存,夹爪断电不丢失。
{"command":"set_gripper_release","speed":500,"block":true}输出
夹爪松开成功:
该指令不论是否为阻塞模式均会返回。
{
"command": "set_gripper",
"state": true
}夹爪松开失败:
该指令不论是否为阻塞模式均会返回。
{
"command": "set_gripper",
"state": false
}该指令为阻塞模式下,运动到指定位置的上报信息。
{"state":"current_trajectory_state","trajectory_state":true,"device":1}夹爪力控夹取set_gripper_pick
夹爪力控夹取,夹爪以设定的速度和力夹取,当夹持力超过设定的力阈值后,停止夹取。
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
set_gripper_pick | string | 设置夹爪力矩夹取。 |
speed | int | 夹爪松开速度,范围1~1000,无单位量纲。 |
force | int | 力控阈值,范围:50~1000,无单位量纲。 |
block | int | true 表示阻塞模式,false 表示非阻塞模式。 |
- 代码示例
输入 设置夹爪力矩夹取。
{"command":"set_gripper_pick","speed":500,"force":200,"block":true}输出
夹爪松开成功:
该指令不论是否为阻塞模式均会返回。
{
"command": "set_gripper",
"state": true
}夹爪松开失败:
该指令不论是否为阻塞模式均会返回。
{
"command": "set_gripper",
"state": false
}该指令为阻塞模式下,运动到指定位置的上报信息。
{
"state": "current_trajectory_state",
"trajectory_state": true,
"device": 1
}夹爪持续力控夹取set_gripper_pick_on
夹爪力控夹取,夹爪以设定的速度和力夹取,当夹持力超过设定的力阈值后,停止夹取;当夹持力再次小于力矩阈值时,夹爪再次夹取,直至夹持力超过力控阈值。
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
set_gripper_pick_on | string | 设置夹爪力控夹取。 |
speed | int | 夹爪松开速度,范围1~1000,无单位量纲。 |
force | int | 力控阈值,范围:50~1000,无单位量纲。 |
block | int | true 表示阻塞模式,false 表示非阻塞模式。 |
{"command":"set_gripper_pick_on","speed":500,"force":200,"block":true}输出
夹爪松开成功:
该指令不论是否为阻塞模式均会返回。
{
"command": "set_gripper",
"state": false
}夹爪松开失败:
该指令不论是否为阻塞模式均会返回。
{
"command": "set_gripper",
"state": false
}该指令为阻塞模式下,运动到指定位置的上报信息。
{
"state": "current_trajectory_state",
"trajectory_state": true,
"device": 1
}夹爪到达指定位置set_gripper_position
夹爪到达指定位置,当当前开口小于指定开口时,夹爪以指定速度松开到指定开口位置;当当前开口大于指定开口时,夹爪以指定速度和力矩闭合往指定开口处闭合,当夹持力超过力矩阈值或者达到指定位置后,夹爪停止。
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
set_gripper_position | string | 设置夹爪达到指定位置。 |
position | int | 夹爪开口位置,范围:1~1000,无单位量纲。 |
block | int | true 表示阻塞模式,false 表示非阻塞模式。 |
{"command":"set_gripper_position","position":500,"block":true}输出
夹爪松开成功。
该指令不论是否为阻塞模式均会返回。
{
"command": "set_gripper",
"state": true
}夹爪松开失败。
该指令不论是否为阻塞模式均会返回。
{
"command": "set_gripper",
"state": false
}该指令为阻塞模式下,运动到指定位置的上报信息。
{
"state": "current_trajectory_state",
"trajectory_state": true,
"device": 1
}查询夹爪状态get_gripper_state
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
get_gripper_state | string | 查询夹爪状态。 |
- 输出参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
enable | int | 夹爪使能标志,0 表示未使能,1 表示使能。 |
status | int | 夹爪在线状态,0 表示离线, 1表示在线。 |
error | int | 夹爪错误信息, 低8位表示夹爪内部的故障信息 bit5-7 保留 bit4 内部通信 bit3 驱动器 bit2 过流 bit1 过温bit0 堵转。 |
mode | int | 当前工作状态:1 夹爪张开到最大且空闲,2 夹爪闭合到最小且空闲,3 夹爪停止且空闲,4 夹爪正在闭合,5 夹爪正在张开,6 夹爪闭合过程中遇到力控停止。 |
current_force | int | 夹爪当前的压力,单位g。 |
temperature | int | 当前温度单位℃。 |
actpos | int | 夹爪开口度。 |
- 代码示例
输入
{"command":"get_gripper_state"}输出
{
"command": "get_gripper_state",
"enable": 1,
"status": 1,
"error": 0,
"mode": 1,
"current_force": 100,
"temperature": 40,
"actpos": 150
}五指灵巧手
睿尔曼机械臂末端配置因时的五指灵巧手,可通过协议对灵巧手进行设置。
设置灵巧手手势set_hand_posture
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
set_hand_posture | string | 设置手势。 |
posture_num | int | 预先保存在灵巧手内的手势序号,范围:1~40。 |
block | bool | true 表示阻塞模式,false 表示非阻塞模式。 |
- 代码示例
输入
{"command":"set_hand_posture","posture_num":1,"block":true}输出 设置成功:
{
"command": "set_hand_posture",
"set_state": true
}设置失败:
{
"command": "set_hand_posture",
"set_state": false
}该指令为阻塞模式下,运动到指定位置的上报信息。
{
"state": "current_trajectory_state",
"trajectory_state": true,
"device": 2
}设置灵巧手动作序列set_hand_seq
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
set_hand_seq | string | 设置手势。 |
seq_num | int | 预先保存在灵巧手内的手势序号,范围:1~40。 |
block | bool | true 表示阻塞模式,false 表示非阻塞模式。 |
- 代码示例
输入
{"command":"set_hand_seq","seq_num":1,"block":true}输出 设置成功:
{
"command": "set_hand_seq",
"set_state": true
}设置失败:
{
"command": "set_hand_seq",
"set_state": false
}该指令为阻塞模式下,运动到指定位置的上报信息。
{
"state": "current_trajectory_state",
"trajectory_state": true,
"device": 2
}设置灵巧手各自由度角度set_hand_angle
设置灵巧手角度,灵巧手有6个自由度,从1~6分别为小拇指,无名指,中指,食指,大拇指弯曲,大拇指旋转。
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
set_hand_angle | string | 设置手指角度。 |
hand_angle | int | 手指角度数组,范围:0~1000.另外,-1代表该自由度不执行任何操作,保持当前状态。 |
block | bool | true 表示阻塞模式,false 表示非阻塞模式。 |
- 代码示例
输入
{"command":"set_hand_angle","hand_angle":[-1,100,200,300,400,500],"block":true}输出 设置成功:
{
"command": "set_hand_angle",
"set_state": true
}设置失败:
{
"command": "set_hand_angle",
"set_state": false
}该指令为阻塞模式下,运动到指定位置的上报信息。
{
"state": "current_trajectory_state",
"trajectory_state": true,
"device": 2
}设置灵巧手速度set_hand_speed
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
set_hand_speed | string | 设置手指速度。 |
hand_speed | int | 手指速度,范围:1~1000。 |
- 代码示例
输入
{"command":"set_hand_speed","hand_speed":500}输出 设置成功
{
"command": "set_hand_speed",
"set_state": true
}```
设置失败
```json
{
"command": "set_hand_speed",
"set_state": false
}设置灵巧手力阈值set_hand_force
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
set_hand_force | string | 设置手指力阈值。 |
hand_force | int | 手指力,范围:1~1000。 |
- 代码示例
输入
{"command":"set_hand_force","hand_force":500}输出 设置成功
{
"command": "set_hand_force",
"set_state": true
}设置失败
{
"command": "set_hand_force",
"set_state": false
}灵巧手角度跟随控制hand_follow_angle
设置灵巧手跟随角度,灵巧手有6个自由度,从1~6分别为大拇指弯曲,食指、中指、无名指、小拇指、大拇指旋转,最高50Hz的控制频率。
注意
如果要使用此功能,需要联系技术支持发送定制的灵巧手固件升级包(傲意或者因时)。
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
hand_follow_angle | string | 设置手指角度。 |
- 因时各自由度的角度定义和运动范围说明如下。
| 角度 | 图例说明 | 范围 |
|---|---|---|
| 小拇指 无名指 中指 食指 | 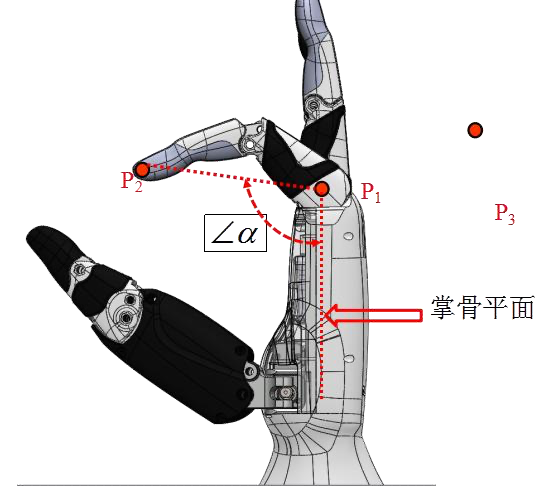 | 19°~176.7° |
| 大拇指弯曲角度 | 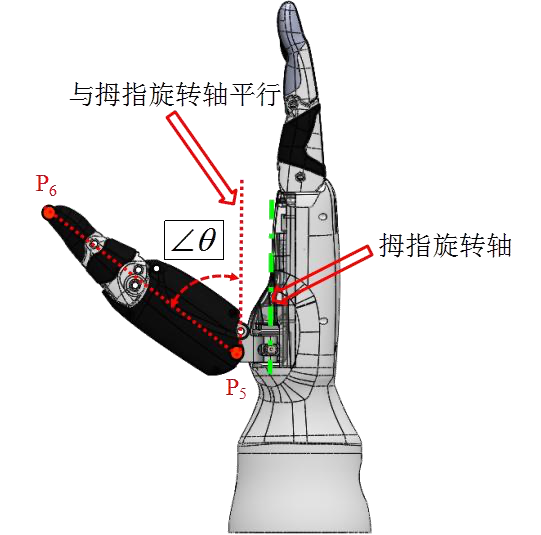 | -130~53.6° |
| 大拇旋转曲角度 | 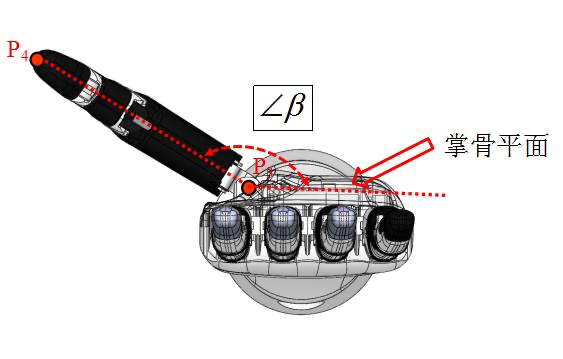 | 90°~165° |
- 傲意各自由度的角度定义和运动范围说明如下。
| 角度 | 图例说明 | 范围 |
|---|---|---|
| 食指 中指 无名指 小拇指 | 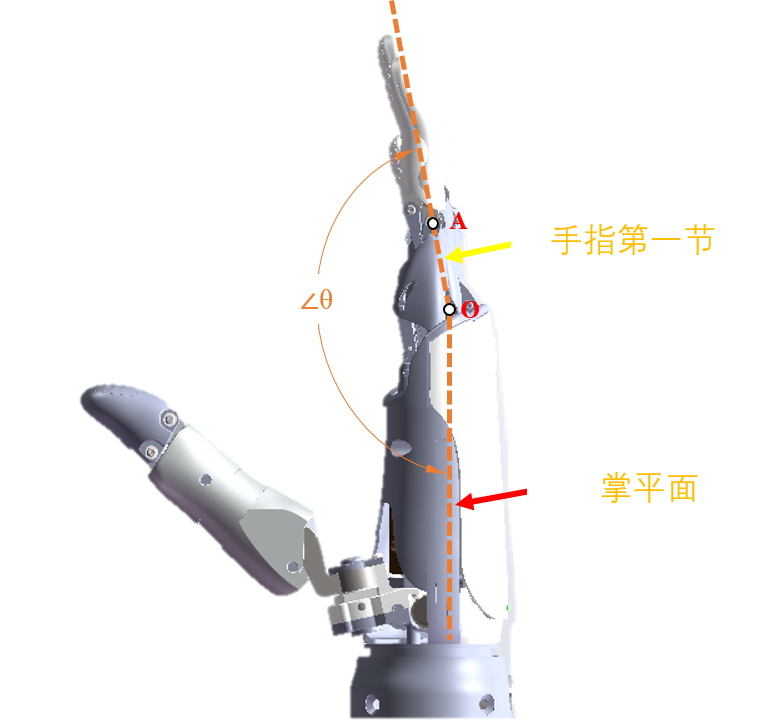 | 100.22°~178.37° 97.81° ~ 176.06° 101.38°~176.54° 98.84°~174.86° |
| 大拇指弯曲角度 | 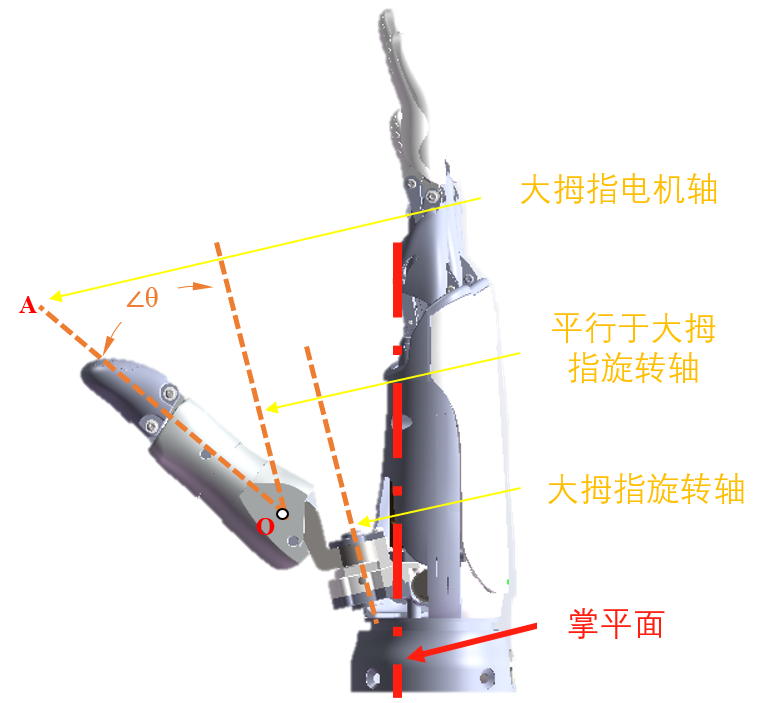 | 2.26° ~ 36.76° |
| 大拇旋转曲角度 | 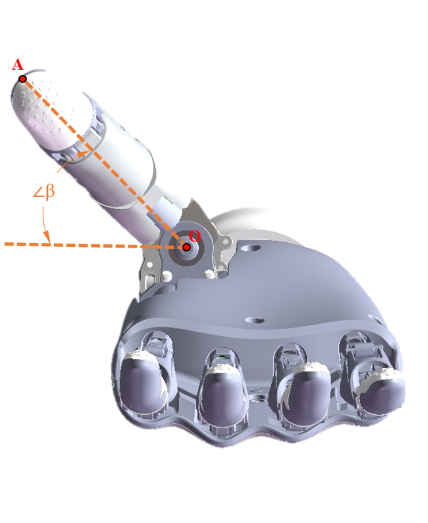 | 0° ~ 90° |
- 代码示例
输入
说明:设置灵巧手各手指动作,hand_angle表示手指角度数组,按照灵巧手厂商定义的角度做控制,例如:
- 傲意的角度范围为-32768到+32767。
- 因时的角度范围为0到+2000;
灵巧手角度的定义(int16):
- 傲意:第一指关节1的角度*100。
- 因时:0-2000,通过联系技术支持得到驱动器行程与角度关系表。
{"command":"hand_follow_angle","hand_angle":[100,100,200,300,400,500]}输出 设置成功
{
"command": "hand_follow_angle",
"set_state": true
}设置失败
{
"command": "hand_follow_angle",
"set_state": false
}灵巧手位置跟随控制hand_follow_pos
设置灵巧手跟随角度,灵巧手有6个自由度,从1~6分别为大拇指弯曲,食指、中指、无名指、小拇指、大拇指旋转,最高50Hz的控制频率。
注意
如果要使用此功能,需要联系技术支持发送定制的灵巧手固件升级包(傲意或者因时)。
- 输入参数
| 功能描述 | 类型 | 说明 |
|---|---|---|
hand_follow_pos | string | 设置手指角度。 |
- 代码示例
输入
说明:设置灵巧手各手指动作,hand_pos表示手指位置数组,按照灵巧手厂商定义的角度做控制,例如:
- 因时的位置范围为0-1000;
- 傲意的位置范围为0-65535。
{"command":"hand_follow_pos","hand_pos":[100,100,200,300,400,500]}输出 设置成功
{
"command": "hand_follow_pos",
"set_state": true
}设置失败
{
"command": "hand_follow_pos",
"set_state": false
}