入门指南:
MODBUS-TCP功能 RM65 I系列机械臂可以通过MODBUS-TCP协议直接调用WEB示教器保存的编程文件,也可直接控制或者查询机械臂状态。
调用在线编程文件
(1)使用modbus-TCP协议,可以调用保存在数据管理里面已经编写好的点位。调用时在modbus-TCP设置页面,选择(写入模式)中(保持寄存器)按照以下方式进行操作便可调用。

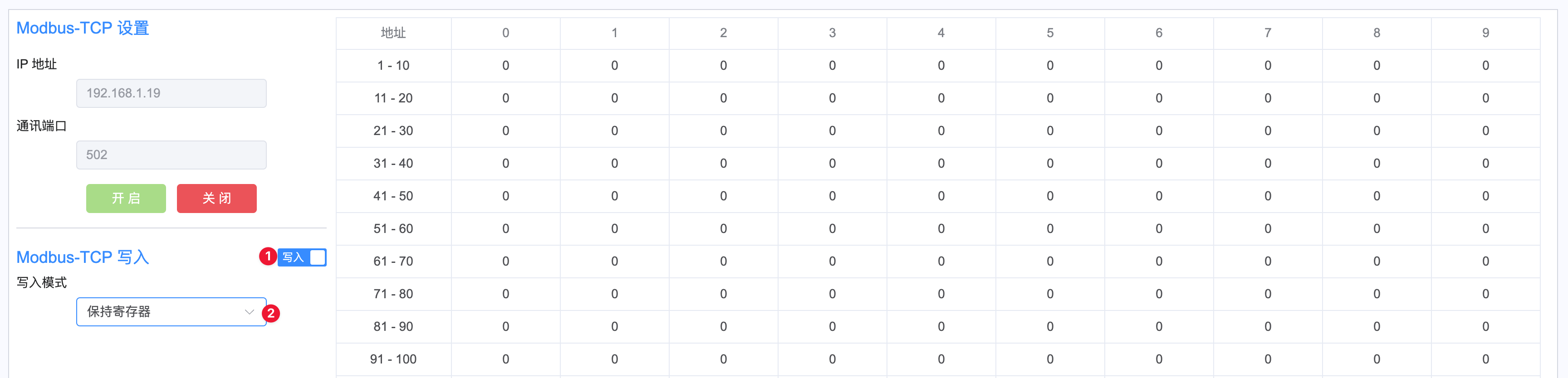
控制机械臂
使用modbus-TCP协议,同样可以在对应寄存器内写入角度、位置、姿态,控制机械臂移动。具体地址参考保持寄存器指令集
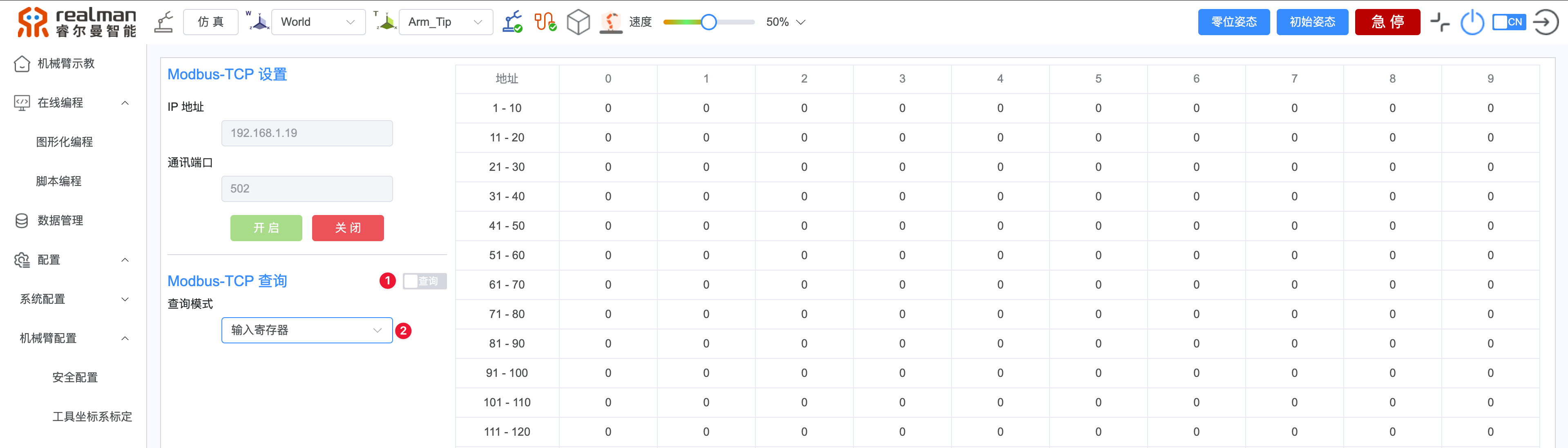
获取机械臂当前状态
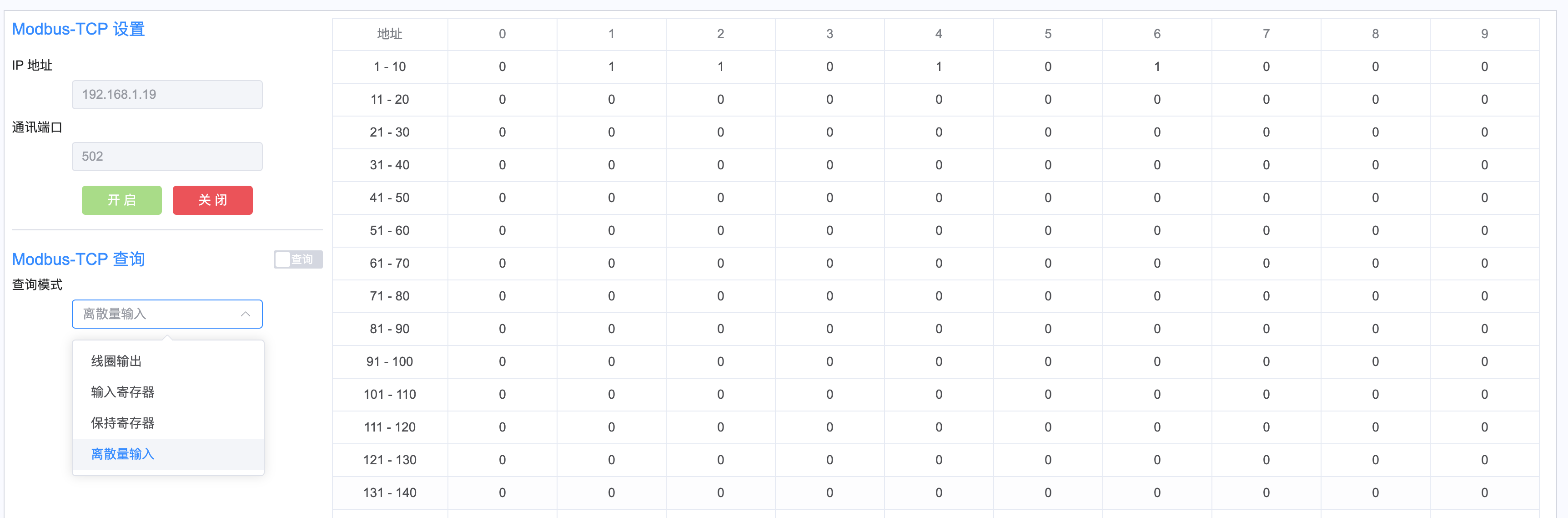
用户选择查询模式、输入寄存器进行查询机械臂当前数据。具体地址参考保持寄存器指令集
IO线圈输出查询写入-离散量输入
线圈输出可根据在地址栏中填写对应的指令,来获取或者操作IO模式的输出或者输出。离散量输入可以通过指令来读取当前机械臂状态。具体地址参考Modbus 从站地址表