C、C++:
五指灵巧手配置handControl 睿尔曼机械臂末端配置因时的五指灵巧手,可通过本接口对灵巧手进行设置,包含手势动作、动作角度、速度、力控范围等。
按灵巧手目标手势序列号运动rm_set_hand_posture()
- 方法原型:
C
int rm_set_hand_posture(rm_robot_handle * handle,int posture_num,bool block,int timeout)可以跳转rm_robot_handle查阅结构体详细描述
- 参数说明:
| 参数 | 类型 | 说明 |
|---|---|---|
handle | 输入参数 | 机械臂句柄。 |
posture_num | 输入参数 | 预先保存在灵巧手内的手势序号,范围:1~40。 |
block | 输入参数 | 阻塞设置: 多线程模式:0,非阻塞模式,发送指令后立即返回;1,阻塞模式,等待机械臂到达目标位置或规划失败后返回。 单线程模式:0,非阻塞模式;其他值,阻塞模式并设置超时时间,根据运动时间设置,单位为秒。 |
timeout | 输入参数 | 阻塞模式下超时时间设置,单位:秒。 |
- 返回值:
| 参数 | 类型 | 说明 |
|---|---|---|
| 0 | int | 成功。 |
| 1 | int | 控制器返回false,传递参数错误或机械臂状态发生错误。 |
| -1 | int | 数据发送失败,通信过程中出现问题。 |
| -2 | int | 数据接收失败,通信过程中出现问题或者控制器超时没有返回。 |
| -3 | int | 返回值解析失败,接收到的数据格式不正确或不完整。 |
| -4 | int | 当前到位设备校验失败,即当前到位设备不为灵巧手。 |
| -5 | int | 超时未返回。 |
- 使用示例
C
//设置灵巧手阻塞执行1号手势,10秒无返回则超时
int posture_num = 1;
ret = rm_set_hand_posture(robot_handle,posture_num,true,10);按灵巧手动作序列号运动rm_set_hand_seq()
- 方法原型:
C
int rm_set_hand_seq(rm_robot_handle * handle,int seq_num,bool block,int timeout)可以跳转rm_robot_handle查阅结构体详细描述
- 参数说明:
| 参数 | 类型 | 说明 |
|---|---|---|
handle | 输入参数 | 机械臂句柄。 |
seq_num | 输入参数 | 预先保存在灵巧手内的动作序号,范围:1~40。 |
block | 输入参数 | true表示阻塞模式,等待灵巧手运动结束后返回;false表示非阻塞模式,发送后立即返回。 |
timeout | 输入参数 | 阻塞模式下超时时间设置,单位:秒。 |
- 返回值:
| 参数 | 类型 | 说明 |
|---|---|---|
| 0 | int | 成功。 |
| 1 | int | 控制器返回false,传递参数错误或机械臂状态发生错误。 |
| -1 | int | 数据发送失败,通信过程中出现问题。 |
| -2 | int | 数据接收失败,通信过程中出现问题或者控制器超时没有返回。 |
| -3 | int | 返回值解析失败,接收到的数据格式不正确或不完整。 |
| -4 | int | 当前到位设备校验失败,即当前到位设备不为灵巧手。 |
| -5 | int | 超时未返回。 |
- 使用示例
C
//设置灵巧手阻塞执行1号动作序列,15秒无返回则超时
int posture_num = 1;
ret = rm_set_hand_seq(robot_handle,posture_num,true,15);设置灵巧手各自由度角度rm_set_hand_angle()
设置灵巧手角度,灵巧手有6个自由度,从1~6分别为小拇指,无名指,中指,食指,大拇指弯曲,大拇指旋转。
- 方法原型:
C
int rm_set_hand_angle(rm_robot_handle * handle,const int * hand_angle)可以跳转rm_robot_handle查阅结构体详细描述
- 参数说明:
| 参数 | 类型 | 说明 |
|---|---|---|
handle | 输入参数 | 机械臂句柄。 |
hand_angle | 输入参数 | 预手指角度数组,范围:0~1000. 另外,-1代表该自由度不执行任何操作,保持当前状态。 |
- 返回值:
| 参数 | 类型 | 说明 |
|---|---|---|
| 0 | int | 成功。 |
| 1 | int | 控制器返回false,传递参数错误或机械臂状态发生错误。 |
| -1 | int | 数据发送失败,通信过程中出现问题。 |
| -2 | int | 数据接收失败,通信过程中出现问题或者控制器超时没有返回。 |
| -3 | int | 返回值解析失败,接收到的数据格式不正确或不完整。 |
- 使用示例
C
//设置灵巧手各手指动作
const int angle[6]= {-1,100,200,300,400,500};
ret = rm_set_hand_angle(robot_handle,angle);设置灵巧手速度rm_set_hand_speed()
- 方法原型:
C
int rm_set_hand_speed(rm_robot_handle * handle,int speed)可以跳转rm_robot_handle查阅结构体详细描述
- 参数说明:
| 参数 | 类型 | 说明 |
|---|---|---|
handle | 输入参数 | 机械臂句柄。 |
speed | 输入参数 | 手指速度,范围:1~1000。 |
- 返回值:
| 参数 | 类型 | 说明 |
|---|---|---|
| 0 | int | 成功。 |
| 1 | int | 控制器返回false,传递参数错误或机械臂状态发生错误。 |
| -1 | int | 数据发送失败,通信过程中出现问题。 |
| -2 | int | 数据接收失败,通信过程中出现问题或者控制器超时没有返回。 |
| -3 | int | 返回值解析失败,接收到的数据格式不正确或不完整。 |
- 使用示例
C
//设置灵巧手各手指速度
int speed = 500;
ret = rm_set_hand_speed(robot_handle,speed);设置灵巧手力阈值rm_set_hand_force()
- 方法原型:
C
int rm_set_hand_force(rm_robot_handle * handle,int hand_force)可以跳转rm_robot_handle查阅结构体详细描述
- 参数说明:
| 参数 | 类型 | 说明 |
|---|---|---|
handle | 输入参数 | 机械臂句柄。 |
hand_force | 输入参数 | 手指力,范围:1~1000。 |
- 返回值:
| 参数 | 类型 | 说明 |
|---|---|---|
| 0 | int | 成功。 |
| 1 | int | 控制器返回false,传递参数错误或机械臂状态发生错误。 |
| -1 | int | 数据发送失败,通信过程中出现问题。 |
| -2 | int | 数据接收失败,通信过程中出现问题或者控制器超时没有返回。 |
| -3 | int | 返回值解析失败,接收到的数据格式不正确或不完整。 |
- 使用示例
C
//设置灵巧手力阈值500
int force = 500;
ret = rm_set_hand_force(robot_handle,force);设置灵巧手角度跟随控制 rm_set_hand_follow_angle()
设置灵巧手跟随角度,灵巧手有6个自由度,从1~6分别为小拇指,无名指,中指,食指,大拇指弯曲,大拇指旋转,最高50Hz的控制频率。 灵巧手角度的定义(int16):1. 傲意:第一指关节1的角度*100。
2. 因时:0-2000,通过联系技术支持得到驱动器行程与角度关系表。
注意
如果要使用此功能,需要联系技术支持发送定制的灵巧手固件升级包(傲意或者因时)。
- 方法原型:
C
int rm_set_hand_follow_angle(rm_robot_handle *handle, const int *hand_angle, int block);可以跳转rm_robot_handle查阅结构体详细描述
- 参数说明:
| 参数 | 类型 | 说明 |
|---|---|---|
handle | 输入参数 | 机械臂句柄。 |
hand_angle | 输入参数 | 设置灵巧手各手指动作,hand_angle表示手指角度数组,按照灵巧手厂商定义的角度做控制,例如: 1. 因时的角度范围为0到+2000; 2. 傲意的角度范围为-32768到+32767。 |
block | 输入参数 | 设置等待机械臂返回状态超时时间,设置0时为非阻塞模式。单位为毫秒。 |
- 因时各自由度的角度定义和运动范围说明如下。
| 角度 | 图例说明 | 范围 |
|---|---|---|
| 小拇指 无名指 中指 食指 | 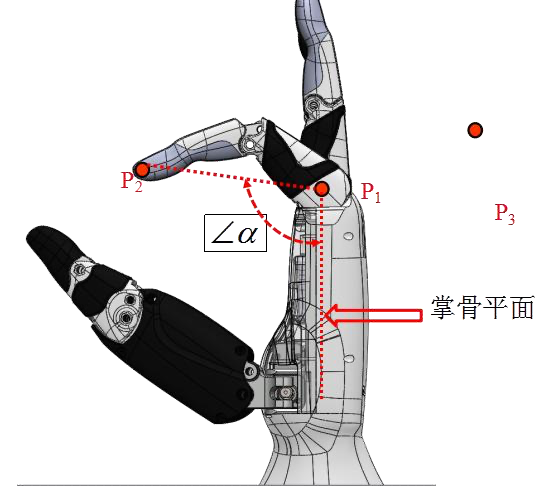 | 19°~176.7° |
| 大拇指弯曲角度 | 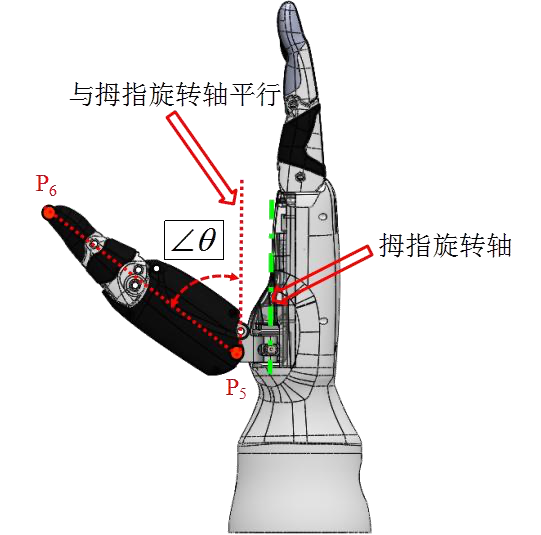 | -130~53.6° |
| 大拇旋转曲角度 | 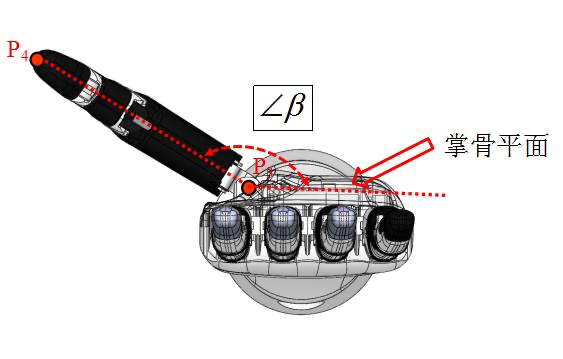 | 90°~165° |
- 傲意各自由度的角度定义和运动范围说明如下。
| 角度 | 图例说明 | 范围 |
|---|---|---|
| 食指 中指 无名指 小拇指 | 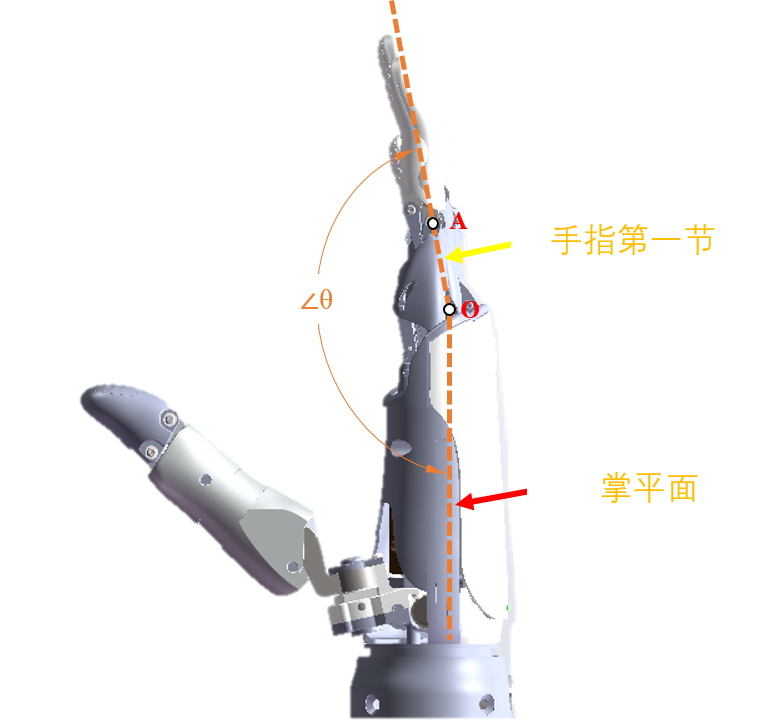 | 100.22°~178.37° 97.81° ~ 176.06° 101.38°~176.54° 98.84°~174.86° |
| 大拇指弯曲角度 | 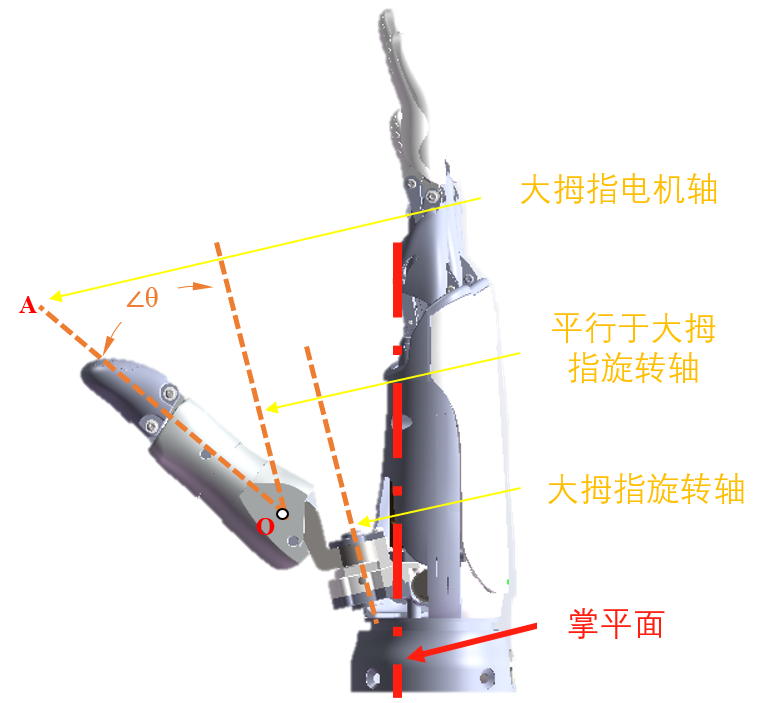 | 2.26° ~ 36.76° |
| 大拇旋转曲角度 | 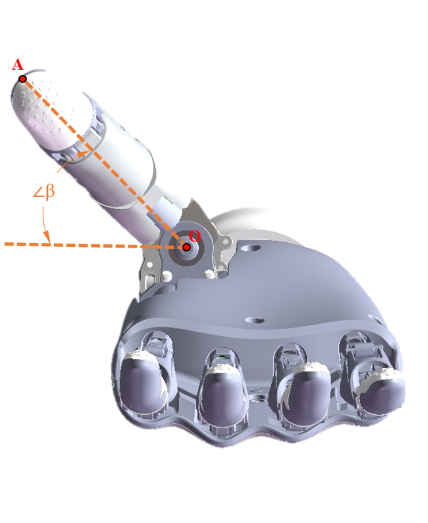 | 0° ~ 90° |
- 返回值:
| 参数 | 类型 | 说明 |
|---|---|---|
| 0 | int | 成功。 |
| 1 | int | 控制器返回false,传递参数错误或机械臂状态发生错误。 |
| -1 | int | 数据发送失败,通信过程中出现问题。 |
| -2 | int | 数据接收失败,通信过程中出现问题或者控制器超时没有返回。 |
| -3 | int | 返回值解析失败,接收到的数据格式不正确或不完整。 |
- 使用示例
C
// 高速控制灵巧手,非阻塞模式
const int angle[6]= {0,100,200,300,400,500};
ret = rm_set_hand_follow_angle(robot_handle,angle,0);设置灵巧手位置跟随控制rm_set_hand_follow_pos()
设置灵巧手跟随位置,灵巧手有6个自由度,从1~6分别为小拇指,无名指,中指,食指,大拇指弯曲,大拇指旋转,最高50Hz的控制频率
注意
如果要使用此功能,需要联系技术支持发送定制的灵巧手固件升级包(傲意或者因时)。
- 方法原型:
C
int rm_set_hand_follow_pos(rm_robot_handle *handle, const int *hand_pos, int block);可以跳转rm_robot_handle查阅结构体详细描述
- 参数说明:
| 参数 | 类型 | 说明 |
|---|---|---|
handle | 输入参数 | 机械臂句柄。 |
hand_pos | 输入参数 | 设置灵巧手各手指动作,hand_pos表示手指位置数组,按照灵巧手厂商定义的角度做控制,例如: 1. 因时的位置范围为0-1000; 2. 傲意的位置范围为0-65535。 |
block | 输入参数 | 设置等待机械臂返回状态超时时间,设置0时为非阻塞模式。单位为毫秒。 |
- 返回值:
| 参数 | 类型 | 说明 |
|---|---|---|
| 0 | int | 成功。 |
| 1 | int | 控制器返回false,传递参数错误或机械臂状态发生错误。 |
| -1 | int | 数据发送失败,通信过程中出现问题。 |
| -2 | int | 数据接收失败,通信过程中出现问题或者控制器超时没有返回。 |
| -3 | int | 返回值解析失败,接收到的数据格式不正确或不完整。 |
- 使用示例
C
// 高速控制灵巧手,非阻塞模式
const int pos[6]= {0,100,200,300,400,500};
ret = rm_set_hand_follow_pos(robot_handle,pos,0);