Demo演示(C、C++):
机械臂力位混合控制示例 1. 项目介绍
本项目演示使用RM65-6F机械臂的力位混合控制功能以保证在笛卡尔空间轨迹规划时,机械臂末端接触力恒定。项目基于Cmake构建,使用了睿尔曼提供的机械臂C语言开发包。
2. 代码结构
RMDemo_ForceControl/
├── build/ # CMake构建生成的输出目录
├── include/ # 自定义头文件存放目录
├── Robotic_Arm/ # 睿尔曼机械臂二次开发包
│ ├── include/
│ │ ├── rm_define.h # 机械臂二次开发包头文件,包含了定义的数据类型、结构体
│ │ └── rm_interface.h # 机械臂二次开发包头文件,声明了机械臂所有操作接口
│ └── lib/
│ ├── api_c.dll # Windows 64bit 的 API 库
│ ├── api_c.lib # Windows 64bit 的 API 库
│ └── libapi_c.so # Linux x86 的 API 库
├── src/ # 源文件存放目录
│ └── main.c # 主要功能的源文件
├── run.bat # Windows快速运行脚本
├── run.sh # linux快速运行脚本
├── CMakeLists.txt # 项目的CMake配置文件
└── README.md # 项目说明文档3.项目下载
通过链接下载 RM_API2 到本地:开发包下载,进入RM_API2\Demo\RMDemo_C目录,可找到RMDemo_ForceControl。
4. 环境配置
在Windows和Linux环境下运行时需要的环境和依赖项:
| 项目 | Linux | Windows |
|---|---|---|
| 系统架构 | x86架构 | - |
| 编译器 | GCC 7.5或更高版本 | MSVC2015或更高版本 64bit |
| CMake版本 | 3.10或更高版本 | 3.10或更高版本 |
| 特定依赖 | RMAPI Linux版本库(位于Robotic_Arm/lib目录) | RMAPI Windows版本库(位于Robotic_Arm/lib目录) |
Linux环境配置
1. 编译器(GCC) 在大多数Linux发行版中,GCC是默认安装的,但可能版本不是最新的。如果需要安装特定版本的GCC(如7.5或更高版本),可以使用包管理器进行安装。以Ubuntu为例,可以使用以下命令安装或更新GCC:
# 检查GCC版本
gcc --version
sudo apt update
sudo apt install gcc-7 g++-7注意:如果系统默认安装的GCC版本已满足或高于要求,则无需进行额外安装。
2. CMake CMake在大多数Linux发行版中也可以通过包管理器安装。以Ubuntu为例:
sudo apt update
sudo apt install cmake
# 检查CMake版本
cmake --versionWindows环境配置
1. 编译器(MSVC2015或更高版本) MSVC(Microsoft Visual C++)编译器通常随Visual Studio一起安装。可以按照以下步骤安装:
- 访问Visual Studio官网下载并安装Visual Studio。
- 在安装过程中,选择“使用C++的桌面开发”工作负载,这将包括MSVC编译器。
- 根据需要选择其他组件,如CMake(如果尚未安装)。
- 完成安装后,打开Visual Studio命令提示符(可在开始菜单中找到),输入
cl命令检查MSVC编译器是否安装成功。
2. CMake 如果Visual Studio安装过程中未包含CMake,可以单独下载并安装CMake。
- 访问CMake官网下载适用于Windows的安装程序。
- 运行安装程序,按照提示进行安装。
- 安装完成后,将CMake的bin目录添加到系统的PATH环境变量中(通常在安装过程中会询问是否添加)。
- 打开命令提示符或PowerShell,输入
cmake --version检查CMake是否安装成功。
5. 使用指南
5.1 快速运行
按照以下步骤快速运行代码:
配置机械臂IP地址: 打开
main.c文件,在main函数中修改robot_ip_address参数为当前机械臂的IP地址,默认IP地址为"192.168.1.18"。Cconst char *robot_ip_address = "192.168.1.18"; int robot_port = 8080; rm_robot_handle *robot_handle = rm_create_robot_arm(robot_ip_address, robot_port);linux 命令行运行: 在终端进入
RMDemo_ForceControl目录,输入以下命令运行C程序:bashchmod +x run.sh ./run.sh运行结果如下:
Windows 运行: 双击run.bat脚本运行 运行结果如下:
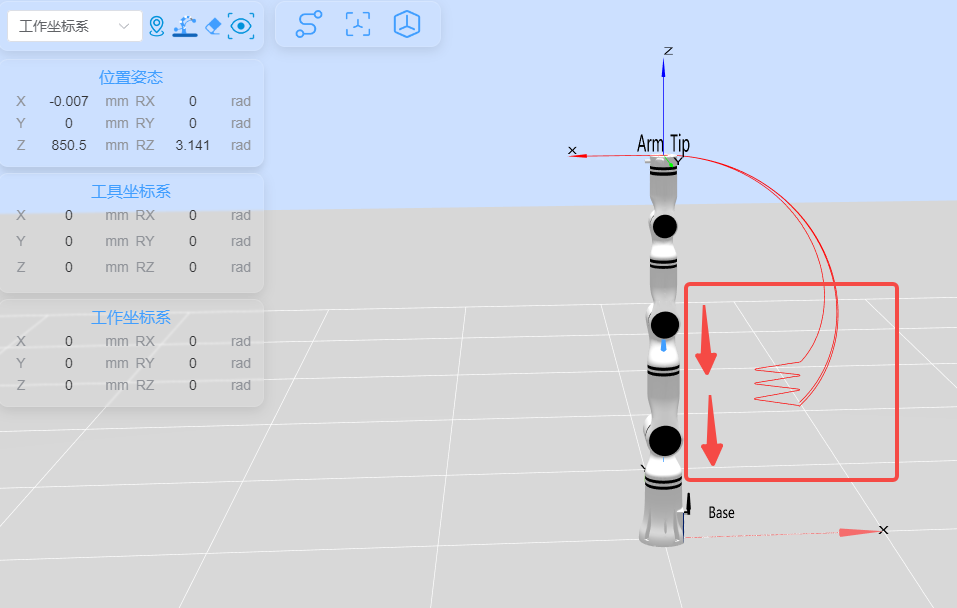
运行脚本后,运行轨迹如下图所示:
5.2 关键代码说明
下面是 main.c 文件的主要功能:
连接机械臂 连接到指定IP和端口的机械臂。
Crm_robot_handle *robot_handle = rm_create_robot_arm(robot_ip_address, robot_port);获取API版本 获取并显示API版本。
Cchar *api_version = rm_api_version(); printf("API Version: %s.\n", api_version);关节运动到到初始位姿 调用
movej运动到各关节零位,然后调用movej_p运动到初始位姿:[x,y,z,rx,ry,rz]分别为[0.3,0,0.4,3.141,0,0]Cfloat joint_angles_start[6] = {0.0, 0.0, 0.0, 0.0, 0.0, 0.0}; rm_movej(robot_handle, joint_angles_start, 20, 0, 1, 1); rm_pose_t start_pose = { {0.3, 0, 0.4},{0, 0, 0}, {3.141, 0, 0} }; rm_movej_p(robot_handle, start_pose, 20, 0, 1, 0);启用力控模式 打开力位混合控制模式,设置使用六维力、工作坐标系、Z轴向下5N大小的恒定力控
Crm_set_force_position(robot_handle, 1, 0, 2, -5);执行笛卡尔空间运动 循环调用
movel直线运动在初始位姿[0.3,0,0.4,3.141,0,0]及目标位姿[0.2,0,0.4,3.141,0,0]之间运动,运动方向为X轴,每段轨迹之间等待2s。机械臂运动时接触六维力末端可感受到恒定的Z轴负方向的力。Crm_pose_t target_pose = { {0.2, 0, 0.4},{0, 0, 0}, {3.141, 0, 0} }; result = rm_movel(robot_handle, target_pose, 60, 0, 0, 1); if (check_result(result, "Failed to perform rm_movel motion to target_pose") != 0) { return -1; } SLEEP_S(2); // Move back to the starting position result = rm_movel(robot_handle, start_pose, 50, 0, 0, 1); if (check_result(result, "Failed to perform rm_movel motion to start_pose") != 0) { return -1; }停止力控制模式 结束后关闭力位混合控制模式
Crm_stop_force_position(robot_handle);
6. 许可证信息
- 本项目遵循MIT许可证。